一种基于数据驱动的汽车方向盘力感建模方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及汽车技术领域,具体涉及驾驶模拟器的汽车方向盘力感建模方法。
背景技术
在驾驶模拟器的转向系统中,由于取消了机械结构,驾驶员无法感受到方向盘的反馈力矩,这对驾驶行为来说不仅影响真实度且容易造成决策与操作的失误,因此需要对实车的汽车方向盘力感进行模拟,以保证驾驶模拟器操作的逼真度,让驾驶员获得真实的驾驶力感,使驾驶员在驾驶模拟器中更具沉浸感。
针对汽车方向盘力感的模拟方法大致可以分为机理建模方法与数据建模方法两类。
机理建模得到的模型中的一些关键参数(例如轮胎力与气胎拖距等)不易获取,因此无法达到较高的模型精度,且这类模型的结构复杂,计算量大,应用过程中实时性难以保证。
数据建模无需探究轮胎与转向系统内部复杂的非线性影响因素,如轮胎力与气胎拖距等,只需采集大量丰富的实验数据就能够得到结构简单且具有较高模型精度的汽车方向盘反馈力矩模型。
因此,有必要采取一种训练效率高、精度好的基于数据驱动的汽车方向盘力感建模方法,并设计一种覆盖场景更丰富的分段训练模式,以提高驾驶模拟器转向系统的逼真度。
发明内容
为了解决上述技术问题,本发明的目的在于提供一种基于数据驱动的汽车方向盘力感建模方法,解决传统机理建模存在的模型结构复杂、精度不高、应用过程中实时性难以保证等问题。
为了达到上述目的,本发明提供一种基于数据驱动的汽车方向盘力感建模方法,包括以下步骤:
步骤一:筛选影响汽车方向盘力感的主要因素,确定汽车方向盘力感模型的输入与输出参数;
步骤二:进行实车实验,采集真实车辆在多个不同驾驶场景下的驾驶数据,并构建用于汽车方向盘力感建模的实验数据库;
步骤三:以实验数据库为基础,选择适用于汽车方向盘力感建模的数据驱动建模方法,对汽车方向盘力感模型进行训练,并利用实车数据对模型进行测试验证;
步骤四:针对多个不同驾驶场景,训练多个不同的基于数据驱动的汽车方向盘力感模型;
步骤五:设计切换不同场景所需汽车方向盘力感模型的控制策略。
进一步地,在步骤一中,所述汽车方向盘力感模型的输入参数为方向盘转角、纵向车速、横摆角速度、侧向加速度,输出参数为方向盘的反馈力矩。
进一步地,在步骤二中,采集真实车辆在多个不同驾驶场景下的驾驶数据时,采集车在以下场景中正常驾驶:高速公路、城市郊区道路、市区道路、泊车区域与原地转向道路。不同类型的真实车辆在丰富驾驶场景下的驾驶数据能够保证所采集数据的多样性与可靠性,能够用于基于数据建模的方向盘力感模型训练,并能够解决传统机理建模的模型精度不高、应用过程中实时性难以保证等问题。
进一步地,在步骤三中,采用NARX动态神经网络用于汽车方向盘力感建模的数据驱动建模方法。
进一步地,训练内容包括原地转向模型和行驶模型的训练。
进一步地,在步骤五中,所述控制策略具体为根据车速切换不同驾驶场景所述汽车方向盘力感模型。
进一步地,当汽车方向盘力感模型发生切换时,模型输出的目标扭矩取多个相邻采样值的均值,从而避免由于模型切换带来的异常手感。
由于采用上述技术方案,本发明达到以下技术效果:本发明以实验数据库为基础,使用真实车辆采集的实车数据,采用基于数据驱动的建模方法进行汽车方向盘力感模型建模,能够解决传统机理建模的模型精度不高、应用过程中实时性难以保证等问题;而且可以针对不同驾驶场景,训练多个汽车方向盘反馈力矩模型,提高了模型在不同场景下的预测精度,并可覆盖更多的应用场景;可以根据车速等车辆运行状态参数切换不同场景所需汽车方向盘反馈力矩模型。
附图说明
图1为影响汽车方向盘力感的主要因素示意图。
图2为动态神经网络模型训练的输入与输出参数。
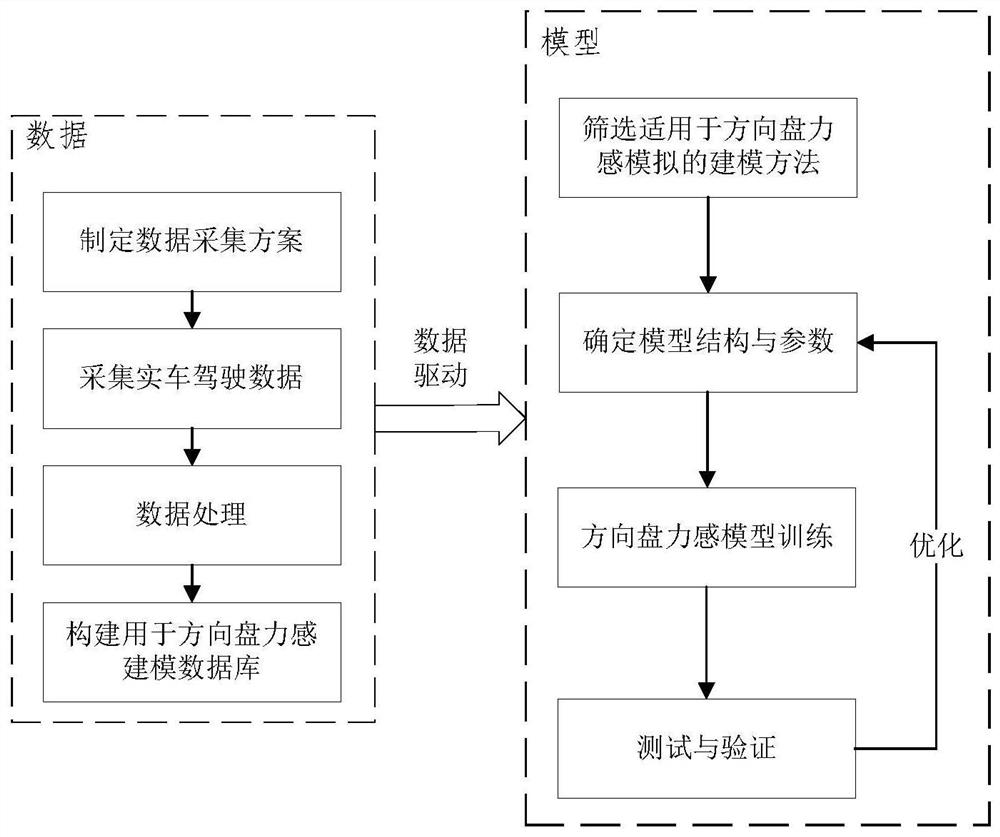
图3为本发明基于数据驱动的汽车方向盘力感建模方法的步骤流程图。
图4为开环NARX动态神经网络结构的示意图。
图5为闭环NARX动态神经网络结构的示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明,下面将结合实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所做的等效变化与修饰前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
首先请参阅图3,本实施例提供一种基于数据驱动的汽车方向盘力感建模方法,包括以下步骤:
步骤一:筛选影响汽车方向盘力感的主要因素,确定汽车方向盘力感模型的输入与输出参数;
步骤二:进行实车实验,采集真实车辆在多个不同驾驶场景下的驾驶数据,并构建用于汽车方向盘力感建模的实验数据库;
步骤三:以实验数据库为基础,选择适用于汽车方向盘力感建模的数据驱动建模方法,对汽车方向盘力感模型进行训练,并利用实车数据对模型进行测试验证;
步骤四:针对多个不同驾驶场景,训练多个不同的基于数据驱动的汽车方向盘力感模型;
步骤五:设计切换不同场景所需汽车方向盘力感模型的控制策略。
结合图3所示,本发明的建模方法主要由数据部分和模型部分组成,基本原理为基于数据驱动进行汽车方向盘力感模型的建模过程。在数据部分,主要包括制定数据采集方案,采集实车驾驶数据,数据处理和构建数据库等步骤;在模型部分,主要包括筛选建模方法,确定模型结构与参数,模型训练,测试与验证等步骤。在本实施例中,对各步骤详细说明如下。
如图1所示,影响汽车方向盘力感的主要因素包括:由驾驶员输入的方向盘转角对转向系统产生影响,进而影响轮胎的反馈力矩;驾驶员输入的车速信号一方面影响助力转向系统的辅助力矩,另一方面通过影响车身的运动状态包括侧向加速度、横摆角速度进而对轮胎的反馈力矩产生影响,侧向加速度、横摆角速度也能在一定程度上反应车辆行驶的环境信息,因此在选择影响参数过程中只考虑以下独立变量参数:方向盘转角、纵向车速、横摆角速度、侧向加速度这四个参数,模型的输出参数为方向盘的反馈力矩。
再结合图2所示,本发明中采用动态神经网络模型训练汽车方向盘力感模型的输入参数为方向盘转角、纵向车速、横摆角速度、侧向加速度,输出参数为方向盘的反馈力矩。
在步骤一中,方向盘反馈力矩的数学模型建立方法为:方向盘的反馈力矩主要包括轮胎反馈力矩、助力系统产生的辅助力矩、转向系统内部机械间作用产生的力矩三个部分,由此得到方向盘反馈力矩的理论计算公式如式(1):
式(1)中,θ
在步骤二中,采集真实车辆在多个不同驾驶场景下的驾驶数据时,采集车在以下场景中正常驾驶:高速公路、城市郊区道路、市区道路、泊车区域与原地转向道路。进行实车实验时,每种驾驶场景分别进行两次试验,共采集600万组数据。
在步骤三中,本实施例采用NARX动态神经网络进行训练,即实车所采集的真实数据的输出y
y
式中x
再结合图3和图4所示,分别表示开环和闭环NARX动态神经网络结构。使用实车实验所采数据训练用于汽车方向盘力感模型建模的动态神经网络模型,训练内容包括原地转向模型和行驶模型的训练,训练步骤如下:
a.初始化网络参数,包括输入x
b.计算隐含层的输出,开环NARX动态神经网络如式(3)所示,闭环NARX动态神经网络如式(4)所示:
c.计算输出层输出,如式(5)所示:
d.计算输出层输出与实际目标值的误差,如式(6)、(7)所示:
e
e.更新隐含层和输出层的权值,如式(8)—(10)所示:
ω
f.更新隐含层和输出层的阈值,如式(11)、(12)所示:
v
g.判断当前迭代是否结束,若未结束则返回步骤b继续计算;
通过以上步骤训练后,得到原地转向模型的预测值与实际值的MSE值为0.18,行驶模型的预测值与实际值的MSE值为0.15。
在本实施例中,针对不同工况下汽车方向盘力感模型切换策略设计为:当车速小于或等于0.5km/h时,汽车方向盘力感模型切换为原地转向模型;当车速高于0.5km/h时,汽车方向盘力感模型切换为行驶模型。
为了避免由于模型切换带来的异常手感,当汽车方向盘力感模型的类型发生切换时,模型输出的目标扭矩取多个相邻采样值的均值。本实施例中,模型输出的目标扭矩优选为采用四个相邻采样值的均值。
以上所述仅为本发明较佳的实施方式,并非用以限定本发明的保护范围;同时,以上的描述对于相关技术领域中具有通常知识者应可明了并据以实施,因此其他未脱离本发明所揭露概念下所完成之等效改变或修饰,都应涵盖在本发明的保护范围之内。
- 一种基于数据驱动的汽车方向盘力感建模方法
- 一种基于深度学习和数据驱动的岩土颗粒材料本构建模方法