一种全地形勘探小车
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及地形勘探领域,尤其是涉及一种全地形勘探小车。
背景技术
我国自然灾害以风雹、地质灾害、森林火灾、地震和雪灾为主,除了经济损失巨大以外,造成大量的人员伤亡,在救灾抗灾下,现场真实的情况无法准确的传回,很有可能发生二次事故,被困人员与救援人员都会有生命危险,因此大家都希望能研发出结构小巧、能适应复杂环境、且能够快速传递清楚画面、反应现场真实环境的智能小车,以便于制定安全有效的救援方案。
另外随着军事技术逐渐向信息化、智能化方向快速发展,智能小车在军事领域逐渐显现出重要的应用价值,其研究和应用涉及传感器技术、机械结构、智能控制等多个学科,智能小车能更有效地代替士兵在核污染、生化污染等严重污染区开展军事侦察、污染物采集及危爆物品处理等危险工作,较隐蔽地完成监视、安全巡逻等军事任务,在提升获取信息的精准性和实时性的同时,扩大侦察范围。除军事应用外,还可以应用于其他众多领域,如在石油矿业等领域,智能小车能开展高速公路自动巡迹道路质量和损坏检测分析等工作;在水利领域,智能小车能够完成河堤、海岸护堤及水库堤坝等重要基础设施的质量和安全性检测等工作。
国内科研院所虽然在小车的研发上取得了较大进步,但仍存在较大不足,小车的尺寸不够小,无法进入窄小的空间,且不能够完全适应复杂的环境,对于复杂的地形,无法灵活稳定、完全可靠地移动。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种体积小、安全可靠的全地形勘探小车。
本发明的目的可以通过以下技术方案来实现:
一种全地形勘探小车,包括图像采集器、充电仓、电机驱动板、驱动电机、图传接口、第一右轮、第二右轮、第一左轮和第二左轮以及相互连接形成车身的上壳体和下壳体,所述的图传接口和图像采集器设置于下壳体上,所述的第一右轮和第一左轮分别设置于下壳体左右两侧,所述的第二右轮和第二左轮分别设置于下壳体的底部,所述的充电仓、电机驱动板和驱动电机分别设置于车身内,所述的电机驱动板通过驱动电机分别与第一右轮、第二右轮、第一左轮和第二左轮连接,用于控制小车运动,图传接口可以将图像采集器采集到的图像进行传输。
进一步地,所述的第一右轮、第二右轮、第一左轮和第二左轮均为麦克纳姆轮,麦克纳姆轮轮毂成45度角的排列,让轮子转动时能产生两个方向的力,用两个角度相反的轮子来相互平横不同方向的力,来达到全向运动。
进一步地,所述的上壳体为板状壳体,其上设有罩壳并开设散热孔,所述的罩壳设置于上壳体上表面,所述的散热孔为条形孔,开设两个。
进一步地,所述的下壳体为盒状壳体,包括相互连接的前挡板、侧挡板、后挡板和底面板,所述的图传接口和图像采集器设置于下壳体的前挡板上,所述的第一右轮和第一左轮分别设置于下壳体两侧的侧挡板上,所述的第二右轮和第二左轮分别设置于下壳体的底面板上。
更进一步地,该全地形勘探小车还包括蓝牙接收器,所述的蓝牙接收器设置于下壳体的前挡板上,位于图传接口的旁侧。
优选地,所述的罩壳为可拆卸罩壳,其可拆卸安装于上壳体上。
进一步地,所述的第一右轮和第一左轮的尺寸相同,分别安装于侧挡板靠近前挡板的一端,所述的第二右轮和第二左轮的尺寸相同,分别安装于底面板靠近后挡板的一端,所述的第一右轮的尺寸大于第二右轮的尺寸。
更进一步地,所述的第一右轮和第一左轮与第二右轮和第二左轮之间通过差速器和行星齿轮连接,添加行星齿轮通过差速比提速来减小后轮尺寸,并对小车长度再缩减,考虑平衡性和在复杂路面轮子的使用寿命提升。
优选地,所述的电机驱动板采用arduino uno驱动板,所述的驱动电机为直流电机,设置四个,分别与第一右轮、第二右轮、第一左轮和第二左轮连接。
进一步优选地,该小车配备ps2手柄,所述的ps2手柄与arduino uno驱动板通信连接,用于控制第一右轮、第二右轮、第一左轮和第二左轮的动作,从而实现通过ps2手柄控制小车运动。
与现有技术相比,本发明具有以下优点:
1)本发明的勘探小车采用麦克纳姆轮,麦克纳姆轮轮毂成45度角的排列,让轮子转动时能产生两个方向的力,用两个角度相反的轮子来相互平横不同方向的力,来达到全向运动,可以适用于各种复杂的地质环境,实现全地形勘探;
2)本发明的勘探小车结构简单,体积较小,同时添加图像采集器、图传接口、蓝牙接收器等,能够清晰传递现场环境,运用远程监控的模式,实时传递现场环境特征,同时配备ps2手柄与uno驱动板连接,能够通过手柄灵活控制小车运动,安全可靠;
3)本发明小车加入差速器并通过行星齿轮可以进一步优化小车内部结构,考虑车尾添加齿轮通过差速比提速来减小后轮尺寸,并能够对小车长度再次缩减,提升平衡性和在复杂路面轮子的使用寿命。
附图说明
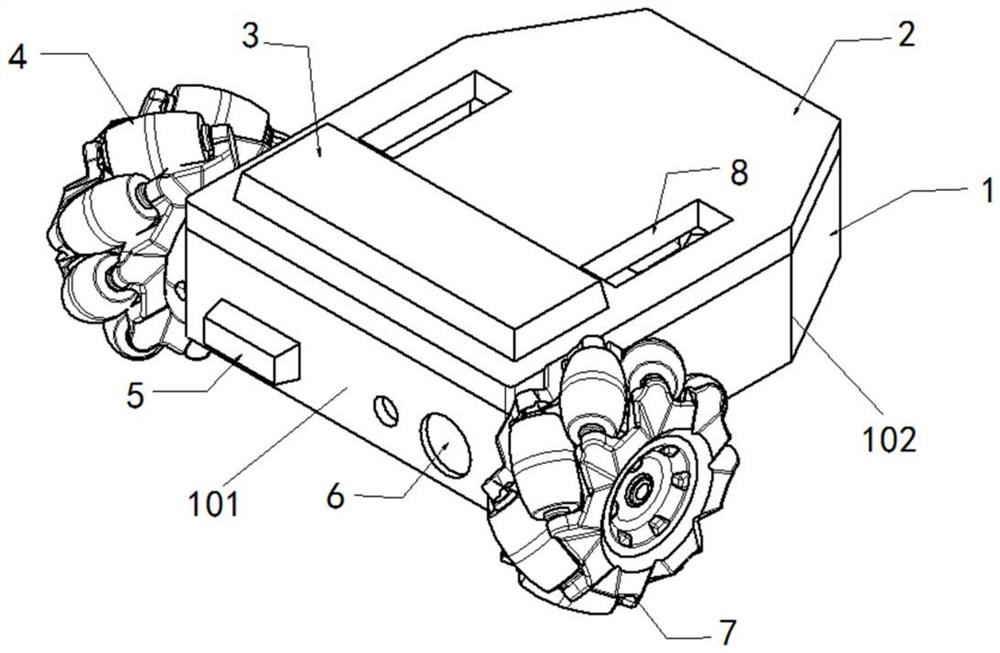
图1为本发明全地形勘探小车的主视图;
图2为全地形勘探小车的底面示意图;
图3为上壳体的结构示意图;
图4为下壳体的结构示意图;
图5为全地形勘探小车轮子的结构示意图。
其中,1、下壳体,101、前挡板,102、侧挡板,103、后挡板,104、底面板,2、上壳体,3、第一右轮,4、罩壳,5、蓝牙接收器,6、图传接口,7、第一左轮,8、散热槽,9、第二右轮,10、第二左轮,11、充电仓。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
实施例
本发明提供一种体积小、安全可靠的全地形勘探小车,体积较小,双轮采用麦克纳姆轮,可以适用于各种复杂的地质环境,同时能够清晰传递现场环境,运用远程监控的模式,实时传递现场环境特征。
如图1所示,该小车包括图像采集器、充电仓11、电机驱动板、驱动电机、图传接口6、第一右轮3、第二右轮9、第一左轮7和第二左轮10以及相互连接形成车身的上壳体2和下壳体1,图像采集器和图传接口6共同构成图像采集上传模块,图传接口6配有通用型图传接口,可以兼容市面上大部分类型的摄像头。
如图5所示,第一右轮3、第二右轮9、第一左轮7和第二左轮10均为麦克纳姆轮,通过四个麦克纳姆轮来实现全地形移动,麦克纳姆轮轮毂成45度角的排列,让轮子转动时能产生两个方向的力,用两个角度相反的轮子来相互平横不同方向的力,来达到全向运动。
如图3所示,上壳体2为板状壳体,其上设有可拆卸的罩壳4并开设散热孔8,罩壳4设置于上壳体2上表面,散热孔8为条形孔,开设两个。
图4所示,下壳体1为盒状壳体,包括相互连接的前挡板101、侧挡板102、后挡板103和底面板104,图传接口6和图像采集器设置于下壳体1的前挡板101上,充电仓11、电机驱动板和驱动电机分别设置于下壳体1内,本实施例中,电机驱动板采用arduino uno驱动板,驱动电机为直流电机,设置四个,分别与第一右轮3、第二右轮9、第一左轮7和第二左轮10连接,该小车配备ps2手柄,ps2手柄与arduino uno驱动板通信连接,用于控制第一右轮3、第二右轮9、第一左轮7和第二左轮10的动作。
如图2所示,第一右轮3和第一左轮7分别设置于下壳体1左右两侧的侧挡板102上,且位于靠近前挡板101一端,第二右轮9和第二左轮10分别设置于下壳体2的底面板104上,且位于靠近后挡板103一端。第一右轮3和第一左轮7的尺寸相同,第二右轮9和第二左轮10的尺寸相同,第一右轮3的尺寸大于第二右轮9的尺寸,第一右轮3和第一左轮7与第二右轮9和第二左轮10之间通过差速器和行星齿轮连接,加入差速器并通过行星齿轮可以进一步优化小车内部结构,考虑车尾添加齿轮通过差速比提速来减小后轮尺寸,并能够对小车长度再次缩减,提升平衡性和在复杂路面轮子的使用寿命。此外,该全地形勘探小车还包括蓝牙接收器5,蓝牙接收器5设置于下壳体1的前挡板101上,位于图传接口6的旁侧。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。