飞行模拟器
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及模拟飞行器技术领域,尤其是飞行模拟器。
背景技术
飞行模拟器是用来模拟飞行器飞行的机器,它能够复现飞行器及空中环境并能够进行操作的模拟装置,同时还需要模拟飞机座舱内部的环境。飞机座舱内部的环境机器复杂,包括了各种仪表和其他辅助飞行的功能按键,目前市场上的飞行模拟器在座舱内部仅复现了操作杆、油门等关键控制设备,对于其他繁复的功能按键来说,由于复现成本高,因此进行了舍弃,但是这样会导致仿真效果差,再加上现有传统的飞行模拟器,在刚性的六自由度的底座上实现的,飞行模拟座舱安放在底座上。它的仿真体验的幅度,受到刚性支撑杆的长度和结构的限制,不能实现较大幅度的倾斜和摆动,从而减弱了仿真的效果和体验的感受。
专利CN 211349698 U公开了一种封闭舱式飞行模拟器,该技术方案采用封闭式的舱壳结构,并增设了附属模块以营造环境氛围。具有来看,本实用新型将舱壳固定于地板上,舱壳内设操控台、屏幕、座椅等结构,以模拟操控界面,同时,在地板下方利用不同方向的缸体提供多自由度的驱动功能;在此基础上,本实用新型在舱壳入口处设置了可收纳的卷材,可对舱壳的入口予以一定程度的封闭,使受训者在相对封闭的环境中受训,符合真实环境特点;而且,卷材可利用电动推杆上升至舱壳顶壁处,因而不影响大型设备的进出;此外,本实用新型在舱壳外部增设了模拟的塔台造型,在一定程度上增进了对营造环境氛围的营造效果。在此方案中采用在地板下方利用不同方向的缸体提供多自由度的驱动功能,仿真体验的幅度有限,无法给体验者全方位更好的视觉冲击效果。
发明内容
本发明目的在于改善和突破传统飞行模拟器仿真飞行的结构局限性,使仿真飞行能够实现大幅度的摆动、回转和联合动作-在回转中摆动局限,并在仿真飞行中产生类似爬升的体验感,提供了飞行模拟器。
本发明提供的技术方案是:
飞行模拟器,包括柔索并联机器人、仿真飞行座舱、视景系统以及控制装置;
所述仿真飞行座舱底部设有一个回转底盘和顶杆,且所述仿真飞行座舱固定在所述回转底盘上,所述顶杆的端部设有一个圆球面与所述回转底盘相连接;
所述回转底盘的边缘设有个连接孔,所述柔性并联机器人设有柔索,所述回转底盘通过所述个连接孔和所述柔性并联机器人的所述柔索相连接;
所述回转底盘下方设有一固定套环,所述顶杆穿通所述固定套环中,且所述固定套环中上下滑动;
所述视景系统包括用于体验虚拟视觉冲击的VR眼镜、投影仪以及投影屏幕;所述控制装置包括主控制器以及仿真飞行控制系统软件,所述控制装置通过和所述视景系统、所述仿真飞行座舱以及所述并联机器人部件通信来控制所述飞行模拟器。
进一步的,所述柔索并联机器人设有柔索和伺服电机以及减速机,所述伺服电机机械连接所述减速机,并控制所述减速机的启动和停止动作;所述减速机设有绳盘,用于调整所述柔索的收卷长度;所述回转底盘的边缘设有连接孔,所述柔索通过所述减速机上的绳盘和所述回转底盘相连接。
进一步的,所述固定套环设在某固定底座的顶部中间位置,且所述固定底座选用三角座、二角座、四角座、五角座或者六角座;所述柔索数量、所述伺服电机数量和所述减速机数量相同,且所述连接孔数量为2个、3个、4个、5个或者6个。
进一步的,所述控制装置还包括状态监控模块,以及分别与状态监控模块连接的运动识别模块、轨迹生成模块以及飞行视景模拟模块,所述运动识别模块用于识别并处理所述仿真飞行座舱的运动信号,并将信号传输至轨迹生成模块;所述轨迹生成模块用于识别并处理运动识别模块所传递的信号,并生成所述仿真飞行座舱运动轨迹的信号,同时将信号传递至飞行视景模拟模块。
进一步的,所述运动识别模块包括安装于所述仿真飞行座舱上的姿态传感器,所述姿态传感器用于识别所述仿真飞行座舱的姿态变化并生成调整信号。
进一步的,所述仿真飞行座舱还包括虚拟现实头盔、虚拟现实输入模块、飞行操纵手柄;所述虚拟现实输入模块包括数据手套、虚拟现实输入平台、微处理器、通讯模块和直流稳压电源,所述微处理器分别与所述数据手套、所述虚拟现实输入平台、所述通讯模块、所述直流稳压电源、所述飞行操纵手柄电连接,所述微处理器通过通讯模块与主控制器连接。
进一步的,所述数据手套包括五个指套,所述指套分别与所述直流稳压电源连接,所述虚拟现实输入平台包括个虚拟按键,所述虚拟按键与微处理器连接,所述指套通过分别通过飞行操纵手柄的动作与虚拟按键接触以生成相应的控制信号传递至微处理器,微处理器根据控制信号生成模拟飞行指令并传递至所述主控制器,所述主控制器根据模拟飞行指令控制模拟仿真飞行座舱运动。
所述数据指套是通过飞行操纵手柄的动作和虚拟按键接触,发出对应的控制信号并传递给微处理器;
微处理器根据接收到的控制信号生成模拟飞行指令并传递给主控制器;
所述主控制器根据模拟飞行指令控制模拟仿真飞行座舱运动。
进一步的,所述虚拟现实头盔包括用于显示飞行模拟画面的显示器以及用于拍摄座舱内部实景画面的摄像头;所述飞行视景模拟模块识别并处理轨迹生成模块传递的信号,生成相应的虚拟画面,同时混入摄像头所拍摄的舱座内部实景画面,混合后的图像传递至显示器进行显示。
进一步的,所述视景系统还包括用于结算仿真数据的核心结算模块和用于将外部设备的数据的信号提供给所述核心结算模块的信号采集模块;所述信号采集模块包括用于将数据信号提供给所述核心结算单元的系统试验台信号采集装置、与核心结算模块电连接的用于向核心结算模块输入控制指令并且用于输出核心结算模块结算出的仿真数据的输入输出模块,所述输入输出模块设有触摸屏显示器,所述触摸屏显示器关联所述输入输出模块并互相通信。
进一步的,所示视景系统还包括模式选择模块,其与所述核心结算模块、所述信号采集模块分别电连接,多个模式的切换,便于将所述核心结算模块替换成真实或者仿真的外部设备。
本发明的一个方面带来的有益效果是:本发明为了实现仿真飞行过程中产生大幅摆动,采用了柔索并联机器人结构,即用柔索替代刚性杆件,减少了刚性杆件的长度约束;增加了顶升和回转的机构,使得仿真飞行中的回转和爬升能够实现;在增加功能和性能的基础上,简化结构,减小所占空间,降低成本。
本发明的一个方面带来的有益效果是:本发明增加了仿真飞行的多种动作和“飞行”难度,提高了仿真飞行的逼真度,提高了仿真飞行的真实感。并且在同功能实现的水平上,大大降低了成本。
附图说明
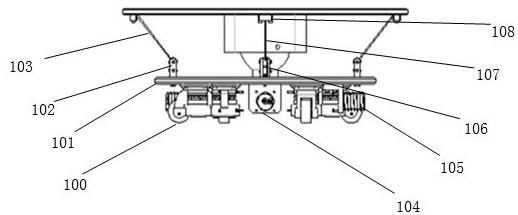
图1为本发明飞行模拟器,设备原理示意图;
图2为本发明飞行模拟器,各模块关系示意图;
图3为本发明飞行模拟器,中控制装置和视景系统框架关联示意图;
图4为本发明飞行模拟器,实施例中控制装置结构示意图;
图5为本发明飞行模拟器,实施例中仿真飞行座舱结构示意图;
图6为本发明飞行模拟器,实施例中视影系统功能模块分布示意图;
其中100、脚轮,101、回转底盘,102、连接孔,103、柔索,104、仿真飞行座舱,105、绳盘,106、固定套环,107、顶杆,108、三角座,109、视景系统,110、控制装置,111、主控制器,112、VR眼镜,113、仿真飞行控制系统软件,114、投影仪以及投影屏幕;115、状态监控模块器,116、运动识别模块,117、轨迹生成模块,118、飞行视景模拟模块,119、虚拟现实头盔,120、虚拟现实输入模块,121、显示器,122、摄像头,123、数据手套,124、通讯模块,125、微处理器,126、虚拟现实输入平台,127、直流稳压电源,128、核心结算模块,129、信号采集模块,130、系统试验台信号采集装置,131、输入输出模块、132、柔索并联机器人。
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案做进一步的详细描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的实施例,都属于本发明的保护范围。
实施例1
本实施例的目的是对上述技术方案的实施方式及注意要点做进一步举例阐述,具体如下:
飞行模拟器,,包括如图1和图2所示,柔索并联机器人132、仿真飞行座舱104、视景系统109以及控制装置110。
其中仿真飞行座舱104底部设有一个回转底盘101和顶杆107,且仿真飞行座舱104固定在回转底盘101上,顶杆107的端部设有一个圆球面与所述回转底盘101相连接;
回转底盘101的边缘设有个连接孔102,柔性并联机器人132设有柔索103,回转底盘101通过个连接孔102和柔性并联机器人132的所述柔索相连接;回转底盘101下方设有一固定套环106,顶杆107套在所述固定套环106中,且固定套环106中上下滑动;
视景系统109包括用于体验虚拟视觉冲击的VR眼镜112、投影仪以及投影屏幕114。
如图3所示,控制装置110包括主控制器111以及仿真飞行控制系统软件113,控制装置110通过和视景系统109、仿真飞行座舱104以及柔索并联机器人132部件通信来控制所述飞行模拟器。
柔索并联机器人132设有柔索103和伺服电机以及减速机,其中伺服电机机械连接减速机,并控制所述减速机的启动和停止动作。
减速机设有绳盘105,用于调整所述柔索103的收卷长度;回转底盘101的边缘设有连接孔102,柔索103通过所述减速机上的绳盘105和所述回转底盘101相连接。
固定套环106设在某三角座108的顶部中间位置,且所述三角座108还可以选用二点座、四角座、五角座或者六角座;所述柔索103数量、所述伺服电机数量和所述减速机数量相同,且所述连接孔102数量为2个、3个、4个、5个或者6个。
通过所述控制装置110分别电连柔索并联机器人132、仿真飞行座舱104以及视景系统109模块系统,控制仿真飞行座舱104随着柔索并联机器人132的动作而动作,实现飞行模拟器的柔性动作,得仿真飞行中的回转和爬升能够实现。
实施例2
本实施例在实施例1的基础上对飞行模拟器的控制装置的功能做进一步延伸,实现飞行模拟器对自身状态的监控、轨迹预设以及校准的功能,具体过程如下:
飞行模拟器,,包括如图1和图2所示,柔索并联机器人132、仿真飞行座舱104、视景系统109以及控制装置110。
其中仿真飞行座舱104底部设有一个回转底盘101和顶杆107,且仿真飞行座舱104固定在回转底盘101上,顶杆107的端部设有一个圆球面与所述回转底盘101相连接;
回转底盘101的边缘设有个连接孔102,柔性并联机器人132设有柔索103,回转底盘101通过个连接孔102和柔性并联机器人132的所述柔索相连接;回转底盘101下方设有一固定套环106,顶杆107套在所述固定套环106中,且固定套环106中上下滑动;
视景系统109包括用于体验虚拟视觉冲击的VR眼镜112、投影仪以及投影屏幕114。
如图3所示,控制装置110包括主控制器111以及仿真飞行控制系统软件113,控制装置110通过和视景系统109、仿真飞行座舱104以及柔索并联机器人132部件通信来控制所述飞行模拟器。
柔索并联机器人132设有柔索103和伺服电机以及减速机,其中伺服电机机械连接减速机,并控制所述减速机的启动和停止动作。
减速机设有绳盘105,用于调整所述柔索103的收卷长度;回转底盘101的边缘设有连接孔102,柔索103通过所述减速机上的绳盘105和所述回转底盘101相连接。
固定套环106设在某三角座108的顶部中间位置,且所述三角座108还可以选用二点座、四角座、五角座或者六角座;所述柔索103数量、所述伺服电机数量和所述减速机数量相同,且所述连接孔102数量为2个、3个、4个、5个或者6个。
如图4所示,控制装置110还包括状态监控模块115、与状态监控模块115连接的运动识别模块116、轨迹生成模块117以及飞行视景模拟模块118。其中运动识别模块116用于识别并处理仿真飞行座舱104的运动信号,并将信号传输至轨迹生成模块117。
轨迹生成模块117用于识别并处理运动识别模块116所传递的信号,并生成仿真飞行座舱104运动轨迹的信号,同时将信号传递至飞行视景模拟模块118。
运动识别模块116包括安装于仿真飞行座舱104上的姿态传感器,姿态传感器用于识别仿真飞行座舱104的姿态变化并生成调整信号。
通过控制装置110分别电连柔索并联机器人132、仿真飞行座舱104以及视景系统109模块系统,控制仿真飞行座舱104随着柔索并联机器人132的动作而动作,实现飞行模拟器的柔性动作,得仿真飞行中的回转和爬升能够实现。
实施例3
本实施例是在实施例2的基础上,对本发明飞行模拟器,,其仿真飞行座舱的功能做进一步延伸,增加虚拟效果的全程动态视觉冲击感。具体过程如下所示:
飞行模拟器,,包括如图1和图2所示,柔索并联机器人132、仿真飞行座舱104、视景系统109以及控制装置110。
其中仿真飞行座舱104底部设有一个回转底盘101和顶杆107,且仿真飞行座舱104固定在回转底盘101上,顶杆107的端部设有一个圆球面与所述回转底盘101相连接;
回转底盘101的边缘设有个连接孔102,柔性并联机器人132设有柔索103,回转底盘101通过个连接孔102和柔性并联机器人132的所述柔索相连接;回转底盘101下方设有一固定套环106,顶杆107套在所述固定套环106中,且固定套环106中上下滑动;
视景系统109包括用于体验虚拟视觉冲击的VR眼镜112、投影仪以及投影屏幕114。
如图3所示,控制装置110包括主控制器111以及仿真飞行控制系统软件113,控制装置110通过和视景系统109、仿真飞行座舱104以及柔索并联机器人132部件通信来控制所述飞行模拟器。
柔索并联机器人132设有柔索103和伺服电机以及减速机,其中伺服电机机械连接减速机,并控制所述减速机的启动和停止动作。
减速机设有绳盘105,用于调整所述柔索103的收卷长度;回转底盘101的边缘设有连接孔102,柔索103通过所述减速机上的绳盘105和所述回转底盘101相连接。
固定套环106设在某三角座108的顶部中间位置,且所述三角座108还可以选用二点座、四角座、五角座或者六角座;所述柔索103数量、所述伺服电机数量和所述减速机数量相同,且所述连接孔102数量为2个、3个、4个、5个或者6个,本实施例中选择三角座108,柔索4根,伺服电机以及减速机4台,连接孔设计成4个。
如图4所示,控制装置110还包括状态监控模块115、与状态监控模块115连接的运动识别模块116、轨迹生成模块117以及飞行视景模拟模块118。其中运动识别模块116用于识别并处理仿真飞行座舱104的运动信号,并将信号传输至轨迹生成模块117。
轨迹生成模块117用于识别并处理运动识别模块116所传递的信号,并生成仿真飞行座舱104运动轨迹的信号,同时将信号传递至飞行视景模拟模块118。
运动识别模块116包括安装于仿真飞行座舱104上的姿态传感器,姿态传感器用于识别仿真飞行座舱104的姿态变化并生成调整信号。
仿真飞行座舱104如图5所示,包括虚拟现实头盔119、虚拟现实输入模块120。其中虚拟现实输入模块120包括数据手套123、虚拟现实输入平台126、微处理器125、通讯模块124和直流稳压电源127,微处理器125分别与数据手套123、虚拟现实输入平台126、通讯模块124和直流稳压电源127电连接,微处理器125通过通讯模块124与主控制器111连接。
再者数据手套123包括五个指套,指套分别与直流稳压电源127连接,
虚拟现实输入平台126包括个虚拟按键,所述虚拟按键与微处理器125
电连接,指套通过飞行操纵手柄的动作分别与虚拟按键接触以生成相应的控制信号传递至微处理125,微处理器125根据控制信号生成模拟飞行指令并传递至所述主控制器111,主控制器111根据模拟飞行指令控制模拟仿真飞行座舱104运动。
虚拟现实头盔119包括用于显示飞行模拟画面的显示器121以及用于拍摄座舱内部实景画面的摄像头122飞行视景模拟模块118识别并处理轨迹生成模块117传递的信号,生成相应的虚拟画面,同时混入摄像头122所拍摄的舱座内部实景画面,混合后的图像传递至显示器121进行显示。
通过控制装置110分别电连柔索并联机器人132、仿真飞行座舱104以及视景系统109模块系统,控制仿真飞行座舱104随着柔索并联机器人132的动作而动作,实现飞行模拟器的柔性动作,得仿真飞行中的回转和爬升能够实现。
实施例4
本实施例是在实施例1、实施例2以及实施例3的基础上,对于飞行模拟器,中视景系统的功能做进一步功能的扩展,在VR眼镜和投影仪以及投影屏幕的应用基础上,对过程中的数据做进一步的核算及提取,保证本发明飞行模拟器视景系统的精确度和稳定性,增加本款新颖的飞行模拟器的功能。
飞行模拟器,,包括如图1和图2所示,柔索并联机器人132、仿真飞行座舱104、视景系统109以及控制装置110。
其中仿真飞行座舱104底部设有一个回转底盘101和顶杆107,且仿真飞行座舱104固定在回转底盘101上,顶杆107的端部设有一个圆球面与所述回转底盘101相连接。
回转底盘101的边缘设有个连接孔102,柔性并联机器人132设有柔索103,回转底盘101通过个连接孔102和柔性并联机器人132的所述柔索相连接;回转底盘101下方设有一固定套环106,顶杆107套在所述固定套环106中,且固定套环106中上下滑动。
视景系统109包括用于体验虚拟视觉冲击的VR眼镜112、投影仪以及投影屏幕114。如图3所示,控制装置110包括主控制器111以及仿真飞行控制系统软件113,控制装置110通过和视景系统109、仿真飞行座舱104以及柔索并联机器人132部件通信来控制所述飞行模拟器。
柔索并联机器人132设有柔索103和伺服电机以及减速机,其中伺服电机机械连接减速机,并控制所述减速机的启动和停止动作。减速机设有绳盘105,用于调整所述柔索103的收卷长度;回转底盘101的边缘设有连接孔102,柔索103通过所述减速机上的绳盘105和所述回转底盘101相连接。固定套环106设在某三角座108的顶部中间位置,且所述三角座108还可以选用二点座、四角座、五角座或者六角座;所述柔索103数量、所述伺服电机数量和所述减速机数量相同,且所述连接孔102数量为2个、3个、4个、5个或者6个。
如图4所示,控制装置110还包括状态监控模块115、与状态监控模块115连接的运动识别模块116、轨迹生成模块117以及飞行视景模拟模块118。其中运动识别模块116用于识别并处理仿真飞行座舱104的运动信号,并将信号传输至轨迹生成模块117。
轨迹生成模块117用于识别并处理运动识别模块116所传递的信号,并生成仿真飞行座舱104运动轨迹的信号,同时将信号传递至飞行视景模拟模块118。
运动识别模块116包括安装于仿真飞行座舱104上的姿态传感器,姿态传感器用于识别仿真飞行座舱104的姿态变化并生成调整信号。
仿真飞行座舱104如图5所示,包括虚拟现实头盔119、虚拟现实输入模块120。其中虚拟现实输入模块120包括数据手套123、虚拟现实输入平台126、微处理器125、通讯模块124和直流稳压电源127,微处理器125分别与数据手套123、虚拟现实输入平台126、通讯模块124和直流稳压电源127电连接,微处理器125通过通讯模块124与主控制器111连接。
再者数据手套123包括五个指套,指套分别与直流稳压电源127连接,
虚拟现实输入平台126包括个虚拟按键,所述虚拟按键与微处理器125
连接,指套通过分别与虚拟按键接触以生成相应的控制信号传递至微处理125,微处理器125根据控制信号生成模拟飞行指令并传递至所述主控制器111,主控制器111根据模拟飞行指令控制模拟仿真飞行座舱104运动。
虚拟现实头盔119包括用于显示飞行模拟画面的显示器121以及用于拍摄座舱内部实景画面的摄像头122飞行视景模拟模块118识别并处理轨迹生成模块117传递的信号,生成相应的虚拟画面,同时混入摄像头122所拍摄的舱座内部实景画面,混合后的图像传递至显示器121进行显示。
如图6所示,视景系统109还包括用于结算仿真数据的核心结算模块128
和用于将外部设备的数据的信号提供给所述核心结算模块的信号采集模129;所述信号采集模块129包括用于将数据信号提供给所述核心结算单元的系统试验台信号采集装置130、与核心结算模块128电连接的用于向核心结算模块128输入控制指令并且用于输出核心结算模块128结算出的仿真数据的输入输出模块131,所述输入输出模块131设有触摸屏显示器,所述触摸屏显示器关联所述输入输出模块131并互相通信。
通过控制装置110分别电连柔索并联机器人132、仿真飞行座舱104以及视景系统109模块系统,控制仿真飞行座舱104随着柔索并联机器人132的动作而动作,实现飞行模拟器的柔性动作,得仿真飞行中的回转和爬升能够实现。
实施例5
在实施例4的基础上,本实施例对本发明分型模拟器增加了模式选择,体验者可以根据各自的实际需求,进行对应的模式切换,以增加整体的动态体验感。具体实施过程如下所示:
飞行模拟器,,包括如图1和图2所示,柔索并联机器人132、仿真飞行座舱104、视景系统109以及控制装置110。
其中仿真飞行座舱104底部设有一个回转底盘101和顶杆107,且仿真飞行座舱104固定在回转底盘101上,顶杆107的端部设有一个圆球面与所述回转底盘101相连接;
回转底盘101的边缘设有个连接孔102,柔性并联机器人132设有柔索103,回转底盘101通过个连接孔102和柔性并联机器人132的所述柔索相连接;回转底盘101下方设有一固定套环106,顶杆107套在所述固定套环106中,且固定套环106中上下滑动;
视景系统109包括用于体验虚拟视觉冲击的VR眼镜112、投影仪以及投影屏幕114。
如图3所示,控制装置110包括主控制器111以及仿真飞行控制系统软件113,控制装置110通过和视景系统109、仿真飞行座舱104以及柔索并联机器人132部件通信来控制所述飞行模拟器。
柔索并联机器人132设有柔索103和伺服电机以及减速机,其中伺服电机机械连接减速机,并控制所述减速机的启动和停止动作。
减速机设有绳盘105,用于调整所述柔索103的收卷长度;回转底盘101的边缘设有连接孔102,柔索103通过所述减速机上的绳盘105和所述回转底盘101相连接。
固定套环106设在某三角座108的顶部中间位置,且所述三角座108还可以选用二点座、四角座、五角座或者六角座;所述柔索103数量、所述伺服电机数量和所述减速机数量相同,且所述连接孔102数量为2个、3个、4个、5个或者6个。
如图4所示,控制装置110还包括状态监控模块115、与状态监控模块115连接的运动识别模块116、轨迹生成模块117以及飞行视景模拟模块118。其中运动识别模块116用于识别并处理仿真飞行座舱104的运动信号,并将信号传输至轨迹生成模块117。
轨迹生成模块117用于识别并处理运动识别模块116所传递的信号,并生成仿真飞行座舱104运动轨迹的信号,同时将信号传递至飞行视景模拟模块118。
运动识别模块116包括安装于仿真飞行座舱104上的姿态传感器,姿态传感器用于识别仿真飞行座舱104的姿态变化并生成调整信号。
仿真飞行座舱104如图5所示,包括虚拟现实头盔119、虚拟现实输入模块120。其中虚拟现实输入模块120包括数据手套123、虚拟现实输入平台126、微处理器125、通讯模块124和直流稳压电源127,微处理器125分别与数据手套123、虚拟现实输入平台126、通讯模块124和直流稳压电源127电连接,微处理器125通过通讯模块124与主控制器111连接。
再者数据手套123包括五个指套,指套分别与直流稳压电源127连接,
虚拟现实输入平台126包括个虚拟按键,所述虚拟按键与微处理器125
连接,指套通过分别与虚拟按键接触以生成相应的控制信号传递至微处理125,微处理器125根据控制信号生成模拟飞行指令并传递至所述主控制器111,主控制器111根据模拟飞行指令控制模拟仿真飞行座舱104运动。
虚拟现实头盔119包括用于显示飞行模拟画面的显示器121以及用于拍摄座舱内部实景画面的摄像头122飞行视景模拟模块118识别并处理轨迹生成模块117传递的信号,生成相应的虚拟画面,同时混入摄像头122所拍摄的舱座内部实景画面,混合后的图像传递至显示器121进行显示。
如图6所示,视景系统109还包括用于结算仿真数据的核心结算模块128
和用于将外部设备的数据的信号提供给所述核心结算模块的信号采集模129;所述信号采集模块129包括用于将数据信号提供给所述核心结算单元的系统试验台信号采集装置130、与核心结算模块128电连接的用于向核心结算模块128输入控制指令并且用于输出核心结算模块128结算出的仿真数据的输入输出模块131,所述输入输出模块131设有触摸屏显示器,所述触摸屏显示器关联所述输入输出模块131并互相通信。视景系统还包括模式选择模块,其与所述核心结算模块、所述信号采集模块分别电连接,多个模式的切换,便于将所述核心结算模块替换成真实或者仿真的外部设备。
通过控制装置110分别电连柔索并联机器人132、仿真飞行座舱104以及视景系统109模块系统,控制仿真飞行座舱104随着柔索并联机器人132的动作而动作,实现飞行模拟器的柔性动作,使得仿真飞行中的回转和爬升能够实现。
- 飞行模拟器用仿真座舱盖边框和后视镜套件及飞行模拟器
- 一种飞行模拟器的仪表装置及飞行模拟器