一种提取激光等离子体轮廓的方法
文献发布时间:2023-06-19 09:29:07
技术领域
本公开属于等离子体图像处理技术领域。具体涉及一种提取激光等离子体轮廓的方法。
背景技术
真空设备广泛应用于工业生产、军事工业、科学研究和深空探测等领域。目前采用的低压探测手段均需将低压气体导入测量仪器并与之接触,并不适合工业工程上的应用,如真空灭弧室,内部真空度要求高于10
激光等离子技术广泛运用于激光质量光谱、脉冲激光沉积和激光诱导等离子光谱等领域。
基于激光诱导等离子体技术的真空开关真空度带电检测方法,较传统电学方法的检测能力提升了两个数量级,并极大地减小了电磁噪声的影响,有望突破半个多世纪以来真空开关设备真空度在线检测的技术瓶颈。研究激光等离子体图像信息随真空度的变化规律,获取能够表征真空度的等离子体图像的特征参数,可以为真空开关设备真空度的带电检测提供理论与应用基础。等离子体图像的轮廓是真空测量中的一个关键参数,其能直观显示真空度对等离子体形貌的影响。而处于真空中的激光等离子体会快速扩散,时间通常在微秒量级,并且尺寸也处于微米量级,人眼无法直接观察到等离子体的形貌,这增加了激光等离子轮廓的获取难度。因此,激光等离子体轮廓的获取必须借助高感光的成像设备,如ICCD相机,通过拍摄微秒时间内等离子体激光图像,处理图像来获取激光等离子体轮廓。然而,由于光子量子特性以及设备的本底噪声的影响,激光等离子体成像边缘十分模糊,难以通过人眼直接界定并描绘激光等离子体轮廓,等离子体轮廓的界定结果较为主观,不够准确。
发明内容
针对现有技术中的不足,本公开的目的在于提供一种提取激光等离子体轮廓的方法,能够快速准确的提取等离子体轮廓。
为实现上述目的,本公开提供以下技术方案:
一种提取激光等离子体轮廓的方法,包括如下步骤:
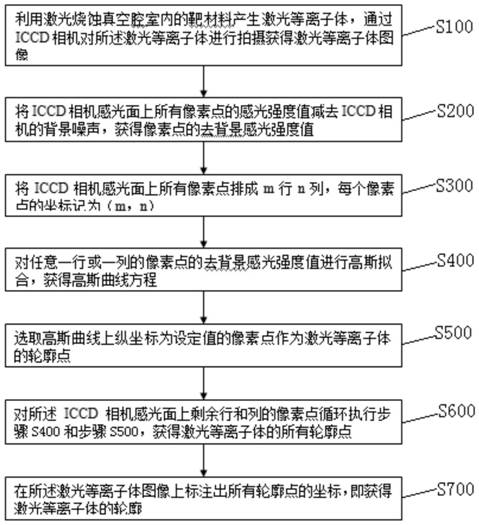
S100:利用激光烧蚀真空腔室内的靶材料产生激光等离子体,通过ICCD相机对所述激光等离子体进行拍摄获得激光等离子体图像;
S200:将ICCD相机感光面上所有像素点的感光强度值减去ICCD相机的背景噪声,获得像素点的去背景感光强度值;
S300:将ICCD相机感光面上所有像素点排成m行n列,每个像素点的坐标记为(m,n);
S400:对任意一行或一列的像素点的去背景感光强度值进行高斯拟合,获得高斯曲线方程;
S500:选取高斯曲线上纵坐标为设定值的像素点作为激光等离子体的轮廓点;
S600:对所述ICCD相机感光面上剩余行和列的像素点循环执行步骤S400和步骤S500,获得激光等离子体的所有轮廓点;
S700:在所述激光等离子体图像上标注出所有轮廓点的坐标,即获得激光等离子体的轮廓。
优选的,步骤S400包括以下步骤:
S401:对激光等离子体的光谱强度通过正态分布函数进行描述;
S402:根据所述激光等离子体的光谱强度的正态分布函数描述获得其准则函数;
S403:计算所述激光等离子体的光谱强度的准则函数所对应的正态分布函数的参数估计。
优选的,步骤S401中,所述激光等离子体发射的光谱强度通过正态分布函数可描述为:
其中,x为行或列像素点的位置数,A为拟合幅值,μ为正态分布函数的位置参数,σ为正态分布函数的尺度参数,π为圆周率。
优选的,步骤S402中,所述激光等离子体的光谱强度的准则函数表示为:
其中,(xi,yi)(i=1,2,3,...,N)为数据点,x
优选的,所述准则函数还可表示为:
其中,p
优选的,步骤S403中,所述正态分布函数的参数估计表示为:
μ=σ
其中,p
优选的,步骤S500中,所述设定值为10。
本公开还提供一种提取激光等离子体轮廓的系统,包括:真空腔,真空腔外设置有位于同一光路上的第一透镜、反射镜、激光器和激光控制器;真空腔外还设置有第二透镜、ICCD相机,所述ICCD相机分别连接有延时发生器和计算机。
优选的,所述激光器在激光控制器的控制下发射激光并经反射镜反射后由第一透镜聚焦于真空腔内的靶材,靶材受激光诱导产生激光等离子体。
优选的,所述激光等离子体由第二透镜聚焦于ICCD相机并输送至计算机进行成像。
与现有技术相比,本公开带来的有益效果为:
1、通过快速获取能够表征真空度的等离子体轮廓,能够为真空开关设备真空度的非接触式带电检测提供理论依据与应用基础;
2、无论等离子体处于何种气压环境、何种辐射强度,均可快速准确地获取激光等离子体轮廓。
附图说明
图1是本公开一个实施例提供的一种提取激光等离子体轮廓的方法流程图;
图2(a)至图2(d)是本公开另一个实施例提供的对不同等离子体辐射强度下像素点的拟合曲线示意图;
图3是本公开另一个实施例提供的一种激光等离子体轮廓提取系统的结构示意图;
图4(a)至图4(d)是本公开另一个实施例提供的等离子体轮廓提取结果示意图;
图5(a)和图5(b)是本公开另一个实施例提供的等离子体轮廓的叠加示意图,其中,图5(a)为设定值为10,30,50,70,90,110的轮廓叠加俯视图,图5(b)为设定值为10,30,50,70,90,110的轮廓叠加侧视图。
具体实施方式
下面将参照附图1至附图5(b)详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本发明的范围。本公开的保护范围当视所附权利要求所界定者为准。
为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本公开实施例的限定。
一个实施例中,如图1所示,本公开提供了一种提取激光等离子体轮廓的方法,包括如下步骤:
一种提取激光等离子体轮廓的方法,包括如下步骤:
S100:利用激光烧蚀真空腔室内的靶材料产生激光等离子体,通过ICCD相机对所述激光等离子体进行拍摄获得激光等离子体图像;
S200:将ICCD相机感光面上所有像素点的感光强度值减去ICCD相机的背景噪声,获得像素点的去背景感光强度值;
S300:将ICCD相机感光面上所有像素点排成m行n列,每个像素点的坐标记为(m,n);
S400:对任意一行或一列的像素点的去背景感光强度值进行高斯拟合,获得高斯曲线方程;
S500:选取高斯曲线上纵坐标为设定值的像素点作为激光等离子体的轮廓点;
S600:对所述ICCD相机感光面上剩余行和列的像素点循环执行步骤S400和步骤S500,获得激光等离子体的所有轮廓点;
S700:在所述激光等离子体图像上标注出所有轮廓点的坐标,即获得激光等离子体的轮廓。
上述实施例构成了本公开的完整技术方案,由于等离子体寿命极短,只有微秒量级,ICCD相机的最短门宽可以达到纳秒量级,通过将ICCD相机的输出接口与数字计算机处理程序相连接,可以在将ICCD相机所拍摄的等离子体图像导入预置有上述提取方法的计算机中的同时,输出所拍摄到的激光等离子体轮廓,从而降低了激光等离子体轮廓的获取难度,为真空开关设备真空度的非接触式带电检测提供理论依据与应用基础。
另外,需要说明的是,由于ICCD相机感光面的像素为1024x1024,因此,ICCD相机会输出一个1024x1024的表格,其中每个表格表示一个像素点,每个表格里的值表示对应像素点感受到光的强度值,直接反应光的强度大小,因此在本公开中将其定义为感光强度值。另外,由于ICCD相机本身存在一个值为几百的背景噪声,所有表格的感光强度值减去此背景噪声,即可获得去背景感光强度值。示例性的,背景噪声的值为571,某个像素点的感光强度值为689,则该像素点的感光强度值减去背景噪声,则得到的去背景感光强度值为112。
另一个实施例中,步骤S400具体包括以下步骤:
S401:对激光等离子体的光谱强度通过正态分布函数进行描述;
该步骤中,该步骤中,激光等离子体在感光面上的强度分布通常符合正态分布,那么每行(或每列)的像素点感光强度分布也应该符合正态分布,可以逐行(或者列)地对感光面感光强度值进行曲线拟合。激光等离子体在感光面上的强度分布通常符合正态分布,即由辐射中心向两边以指数的形式衰减,其发射光谱强度能够通过正态分布函数进行描述,如下式所示:
其中,x为行或列像素点的位置数(排序1~n对应的位置数),A为拟合幅值,μ为正态分布函数的位置参数,σ为正态分布函数的尺度参数,π为圆周率。
S402:根据所述激光等离子体的光谱强度的正态分布函数描述获得其准则函数;
该步骤中,假设数据点{x
其中,(x
此时,只需求得{x
其中,p
S403:计算所述激光等离子体的光谱强度的准则函数所对应的正态分布函数的参数估计。
该步骤中,对应正态分布函数的参数估计如下所示:
μ=σ
其中,p
另一个实施例中,步骤S500中,所述设定值为10。
本实施例中,如图5(a)和图5(b)所示,其中图5(a)为设定值为10,30,50,70,90,110的轮廓叠加俯视图,图5(b)为设定值为10,30,50,70,90,110的轮廓叠加侧视图,通过两张附图可以地看出,随着设定值的增加,激光等离子体的轮廓逐渐减小,当设定值为10时,激光等离子体的轮廓范围最大,可以很好地表现出激光等离子体的轮廓,而当设定值为110时,等离子体轮廓就只剩一个很小的圈,并不能完整地表现出激光等离子体地轮廓形貌。
另外,需要说明的是,由于ICCD相机输出的是一个1024X1024矩阵,每个表格代表一个像素点,每行或每列处理后得到的是两个轮廓点,示例性的,在ICCD相机1024x1024的感光面上,第5行像素点的轮廓点所在列数为25和865,记为(5,25)、(5,865),那么就将等离子体轮廓图像的第5行第25列以及第5行第865列的点标记为轮廓点。将所有轮廓点按照其所在行或列的顺序进行排列,最后得到的就是一个闭环的轮廓图,且轮廓上的感光强度值相同。
下面结合图2(a)至图2(d)对本公开所提出的技术方案进行说明,如图2(a)所示,由于本公开中所采用的ICCD相机的感光面尺寸为1024像素*1024像素,因此需要对ICCD相机感光面上1024行(或列)像素点进行循环操作。
根据上述拟合算法,可以得到如图2(b)至图2(d)所示的三种不同等离子体辐射强度下像素点的强度值及其拟合得到的高斯曲线(图2(b)为弱光强下的拟合曲线,图2(c)为中等光强下的拟合曲线,图2(d)为强光强下的拟合曲线),其中,图2(b)至图2(d)的右上角为相应的等离子体图像及其轮廓图。可以看到,在三种不同的等离子体辐射强度下,高斯拟合均具有较强的拟合能力,三种典型的拟合条件下拟合方程的确定系数分别为0.85、0.90和0.92。
另一个实施例中,如图3所示,本公开还提供一种激光等离子体图像轮廓提取系统,包括:真空腔,真空腔外设置有位于同一光路上的第一透镜、反射镜、激光器和激光控制器;真空腔外还设置有第二透镜、ICCD相机,所述ICCD相机分别连接有延时发生器和计算机。
本实施例中,优选使用Andor公司生产的DH734ICCD相机,能够探测最小时间分辨率为2ns的等离子体。激光器优选采用法国quantel公司生产的brilliant Eazy,通过Q调制方式可以将激光脉冲的脉宽压缩至5ns,最大激光能量为150mJ。激光器产生的激光经激光反射镜BK-13反射后,通过直径为1英寸、焦距为150mm的凸透镜垂直聚焦于真空腔室内部的靶材上,靶材受激光诱导产生的等离子体在垂直于激光入射的方向被收集。将ICCD相机的脉宽设置为5ns,门宽设置为100ns,增益设置为0,此时,延时发生器控制ICCD相机在脉冲激光产生一定时间后(本实施例中,ICCD相机是在脉冲激光产生600us后开始拍摄)从垂直于脉冲激光的入射方向对等离子体进行拍摄,此时,等离子体通过焦距为150mm的平凸透镜聚焦于ICCD的入射窗口。
为了验证本公开所述方法可以提取任意条件下的激光等离子体轮廓,下面通过利用本公开所述装置提取环境气压为10
以上结合具体实施例描述了本公开的基本原理,但是,需要指出的是,在本公开中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本公开的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本申请为必须采用上述具体的细节来实现。
- 一种提取激光等离子体轮廓的系统及方法
- 一种基于改进的Alpha Shapes算法的地面激光点云建筑物轮廓线提取方法