毫米波雷达自动校准系统与方法
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于雷达校准技术领域,具体涉及一种毫米波雷达自动校准方法。
背景技术
毫米波雷达具有频率高、波长短、频带宽、体积小、重量轻、隐蔽性和机动性好等特点,在车载、制导、军事等领域具有非常光明的应用前景。毫米波雷达是利用目标对电磁波的反射来发现并测定目标位置的。通常,为了提高角度分辨率,毫米波雷达采用多接收天线的布局,通过计算接收天线相位,得到目标角度信息。
但是,由于天线存在加工误差、工艺差异、材料差异等,实际的天线参数同设计参数往往存在较大的差异,这会导致接收天线相位发生改变。故,需要对相位进行校准,实现对毫米波雷达测角的修正。
在传统的雷达校准方法中,使用目标模拟器来执行毫米波雷达的相位校准。然而,由于目标模拟器本身存在系统误差,以及雷达探测目标也存在误差,因此,通过单次测试不能精确计算并存储用于毫米波雷达校准相位阵列。
发明内容
本发明的目的是在于克服现有技术中存在的不足,提供一种毫米波雷达自动校准方法,通过自动进行多次校准计算,对计算结果进行均值处理,得到毫米波雷达校准相位阵列,并自动更新到毫米波雷达中。
本发明实施例采用的技术方案是:
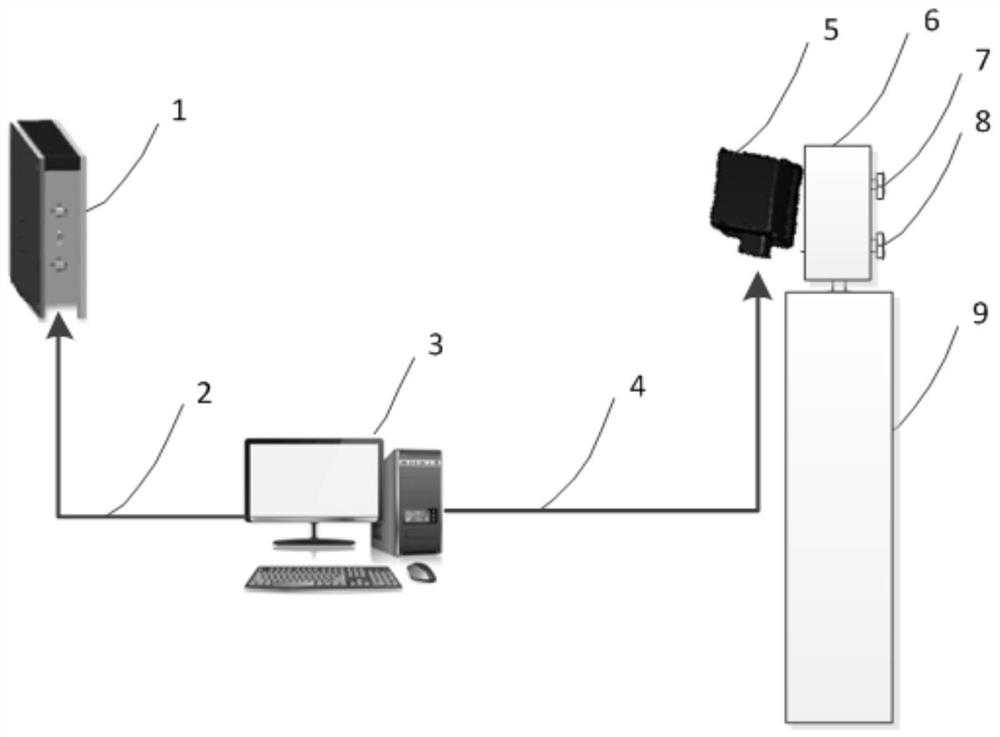
本发明实施例提出一种毫米波雷达自动校准系统,包括:目标模拟器、上位机、测试转台、底座;
上位机分别与目标模拟器和毫米波雷达连接;测试转台安装在底座上,毫米波雷达安装在测试转台上,能够跟随测试转台一起水平和俯仰转动;目标模拟器设置在毫米波雷达前方数米处。
进一步地,测试转台的水平和俯仰角度经过零位校准。
本发明实施例还提出一种毫米波雷达自动校准方法,适用于如上文所述的毫米波雷达自动校准系统,包括:
根据设计的接收天线间距和波长值计算出接收天线标准相位信息;毫米波雷达实际探测目标进行处理得到一维FFT数据,该一维FFT数据包含接收天线实际相位信息,通过计算实际相位和标准相位的相位差信息,用于校准后的相位信息补偿。
进一步地。该方法具体包括以下步骤:
S1.毫米波雷达中的存储器中预设相位参数矩阵Pa;
S4.通过上位机设置目标模拟器的系统参数;
S5.在上位机中设置模拟目标参数,包括:开始距离Rs、结束距离Rf、速度Vt、校准源角度At、雷达散射截面积RCS;开始模拟,模拟目标以Vt的速度沿着角度At从Rs对应的位置往Rf对应的位置运动;其中设置的模拟目标参数要在毫米波雷达目标探测范围内;
S6.开始模拟的同时,上位机将模拟目标参数发送给毫米波雷达;
S7.毫米波雷达的处理器,根据n根接收天线间距阵列D=[0,d1,…,dn-1],波长为λ,校准源角度为At,计算出标准方向阵列AR=exp(-i*2*π*D*sin(At)/λ),其中i为虚数单位;
S8.根据当前毫米波雷达探测的目标距离值Rt,计算对应在一维FFT数据中的距离维坐标Rc=目标距离值Rt/距离分辨率Rd,其中Rd=光速c/(2*有效带宽B);
S9.根据距离维坐标Rc提取一维FFT数据中n根接收天线对应距离维的阵列D1FFTData(n*Vcmax),并对Vcmax进行均值处理得到均值阵列D1FFTDataAver(n*1);其中Vcmax为速度维个数;
S10.将阵列D1FFTDataAver以第一根接收天线Rx0为参考进行归一化处理,得到归一化阵列D1FFTDataNorm,其与标准方向阵列AR点除,得到校准相位差阵列Ca;
S11.当毫米波雷达探测的目标距离值Rt S12.毫米波雷达中自动重复步骤S8~S10,计算目标在不同距离下的校准相位差阵列Ca; S13.自动校准计算完成,自动计算的次数N=(Rf-Rs)/Vt/Td,其中Td为毫米波雷达采样周期;将N次Ca进行均值处理得到最终校准相位差阵列CaAver; S14.将最终校准相位差阵列CaAver与Pa点乘得到校准相位参数阵列Pa_c,保存到毫米波雷达的存储器中。 本发明的优点: 1)在校准过程中,能够自动进行多次校准计算,对计算结果进行均值处理,最小化目标模拟器系统误差及雷达探测误差的同时,得到的校准相位阵列更精确。 2)在毫米波雷达中进行校准相位阵列计算,可以将计算结果自动保存在毫米波雷达Flash中,不需要额外的参数写入过程,校准流程更简便。 附图说明 图1为本发明实施例的校准系统示意图。 图2为本发明实施例的接收天线布局示意图。 图3为本发明实施例的校准方法流程图。 图4为本发明实施例的一维FFT数据示意图。 具体实施方式 为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。 如图1所示,本发明实施例提出的一种毫米波雷达自动校准系统,包括目标模拟器1、上位机3、测试转台6、底座9; 上位机3分别与目标模拟器1和毫米波雷达5连接;测试转台6安装在底座9上,毫米波雷达5安装在测试转台6上;目标模拟器1设置在毫米波雷达5前方数米处; 其中,目标模拟器1与上位机3通过网线2连接,上位机3与毫米波雷达5通过CAN总线连接,毫米波雷达5通过紧固螺栓7、8安装在测试转台6上,能够跟随测试转台一起水平和俯仰转动;目标模拟器距离毫米波雷达1~2m;测试转台6的水平和俯仰角度已进行零位校准;上位机3是一台测试电脑,预设了目标模拟器的控制软件; 本发明实施例提出的一种毫米波雷达自动校准方法,包括:根据设计的接收天线间距和波长值计算出接收天线标准相位信息;毫米波雷达实际探测目标进行处理得到一维FFT数据,该一维FFT数据包含接收天线实际相位信息,通过计算实际相位和标准相位的相位差信息,用于校准后的相位信息补偿。 如图2所示,接收天线Rx0、Rx1......Rxn,接收天线间距分别为d1、d2......dn-1; 毫米波雷达自动校准方法,具体包括以下步骤: S1.毫米波雷达中的存储器中,例如Flash存储器,预设相位参数矩阵Pa; S2.将毫米波雷达与上位机连接; S3.将上位机与目标模拟器连接; S4.通过上位机设置目标模拟器的系统参数; S5.在上位机中设置模拟目标参数,包括:开始距离Rs、结束距离Rf、速度Vt、校准源角度At、雷达散射截面积RCS;开始模拟,模拟目标以Vt的速度沿着角度At从Rs对应的位置往Rf对应的位置运动;其中设置的模拟目标参数要在毫米波雷达目标探测范围内; S6.开始模拟的同时,上位机将模拟目标参数发送给毫米波雷达; S7.毫米波雷达的处理器,根据n根接收天线间距阵列D=[0,d1,…,dn-1],波长为λ,校准源角度为At,计算出标准方向阵列AR=exp(-i*2*π*D*sin(At)/λ),其中i为虚数单位; S8.根据当前毫米波雷达探测的目标距离值Rt,计算对应在一维FFT数据中的距离维坐标Rc=目标距离值Rt/距离分辨率Rd,其中Rd=光速c/(2*有效带宽B); S9.根据距离维坐标Rc提取一维FFT数据中n根接收天线对应距离维的阵列D1FFTData(n*Vcmax),并对Vcmax进行均值处理得到均值阵列D1FFTDataAver(n*1);其中Vcmax为速度维个数; S10.将阵列D1FFTDataAver以第一根接收天线Rx0为参考进行归一化处理(即第Rxn天线对应值与第Rx0天线对应值点除),得到归一化阵列D1FFTDataNorm,其与标准方向阵列AR点除,得到校准相位差阵列Ca; S11.当毫米波雷达探测的目标距离值Rt S12.毫米波雷达中自动重复步骤S8~S10,计算目标在不同距离下的校准相位差阵列Ca; S13.自动校准计算完成,自动计算的次数N=(Rf-Rs)/Vt/Td,其中Td为毫米波雷达采样周期;将N次Ca进行均值处理得到最终校准相位差阵列CaAver; S14.将最终校准相位差阵列CaAver与Pa点乘得到校准相位参数阵列Pa_c,保存到毫米波雷达的Flash存储器中,用于校准后目标角度探测。 最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 毫米波雷达自动校准系统与方法
- 毫米波雷达半自动区域边界检测方法