用于控制转向的设备和方法
文献发布时间:2023-06-19 09:30:39
技术领域
本公开内容涉及用于控制转向的设备和方法。特别地但非排他地,本公开内容涉及用于控制诸如汽车的道路车辆中的转向的设备和方法。
本发明的方面涉及设备、系统、车辆、方法、计算机程序和其中存储有指令的非暂态计算机可读存储介质。
背景技术
设计为在道路上使用的一些汽车被布置成具有均可转向的四个道路轮。对于这样的汽车,已知在低速下将后轮与前轮异相转向以增强操纵性,并且在高速下将后轮与前轮同相转向以增强稳定性。
这样的汽车的问题在于,可以增强道路上的性能的四轮转向布置并非最适合在其他地形上使用。
本发明的目的是解决现有技术的缺点。
发明内容
本发明的方面和实施方式提供了如所附权利要求书中所要求保护的设备、系统、车辆、方法和计算机程序以及其中存储有指令的非暂态计算机可读存储介质。
根据本发明的一个方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,控制装置被配置成进行以下操作:接收第一信号,第一信号指示请求转向角;以及接收第二信号,第二信号指示从至少第一模式和第二模式中选择的选择模式;根据第一信号和第二信号确定建议后轮转向角;以及提供输出信号,输出信号被配置成使后轮以建议后轮转向角转向。这提供了以下优点:后轮的转向可以针对选择模式进行优化,例如以使车辆的操纵性或稳定性最大化,并且可以针对车辆正在行驶的地形进行优化。
在一些实施方式中,控制装置被配置成接收指示车辆的当前速度的第三信号,并且根据第三信号确定建议后轮转向角。这提供了以下优点:后轮的转向可以针对车辆在地形上行驶的速度进行优化,例如以使车辆的操纵性或稳定性最大化。
在一些实施方式中:建议后轮转向角是前轮转向角与增益值的乘积;控制装置被配置成利用取决于由第二信号指示的选择模式的增益值来确定建议后轮转向角。
在一些实施方式中,控制装置被配置成根据当前速度小于阈值速度还是大于阈值速度来选择增益值。这提供了以下优点:后轮的转向可以被布置成在低于阈值速度的情况下增强操纵性和/或在高于阈值速度的情况下增加稳定性。
在一些实施方式中,控制装置被配置成:根据当前速度小于阈值速度,使后轮以与前轮转向角异相的建议后轮转向角转向;以及根据当前速度大于阈值速度,使后轮以与前轮转向角同相的建议后轮转向角转向。这提供了以下优点:后轮的转向增强了小于阈值速度下的操纵性并增加了大于阈值速度下的稳定性。
在一些实施方式中,控制装置被配置成根据选择模式来选择阈值速度。这提供了以下优点:在稳定性不太重要的地形上,可以向车辆提供直到相对高的阈值速度下的增强的操纵性,而在稳定性更成问题的地形上,可以提供低至相对低的阈值速度下的增加的稳定性。
在一些实施方式中,控制装置被配置成从地形估计系统接收第二信号,地形估计系统被配置成根据检测到的车辆正在行驶的地面的特征来产生第二信号。这提供了以下优点:能够根据车辆行驶的地形的变化来自动地调整对建议后轮转向角的确定。
在一些实施方式中,控制装置被配置成:根据确定车辆的车轮与车轮所接触的地面之间的摩擦力低于第一摩擦力阈值而选择第一模式;以及根据确定所述摩擦力高于第一摩擦力阈值而选择第二模式。
在一些实施方式中,控制装置被配置成根据确定车辆的车轮所接触的地面能够由车辆的车轮引起变形而选择第一模式。
在一些实施方式中,响应于用户输入装置处的输入来产生第二信号。
在一些实施方式中,根据选择模式来确定车辆的至少一个性能特征,所述至少一个性能特征包括以下组中的至少之一:油门踏板映射;变速器映射;稳定性控制设置。
在一些实施方式中,控制装置被配置成将车辆的当前状况确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;预定义状况包括以下中至少之一:低牵引力状况;以超过阈值侧倾角的侧倾角取向;沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮的转向。
在一些实施方式中,控制装置包括存储有指令的电子存储器装置以及电子处理器,电子处理器电耦接到电子存储器装置并且被配置成访问电子存储器装置并且执行指令。
根据本发明的另一方面,提供了一种系统,该系统包括根据前述段落中任一段落所述的设备以及至少一个致动器,所述至少一个致动器用于响应于输出信号来控制车辆的后轮的转向角。
在一些实施方式中,该系统包括地形估计系统,地形估计系统被配置成确定车辆正在行驶的地形的特征,其中,控制装置被配置成根据控制装置从地形估计系统接收的信号来选择选择模式。
根据本发明的又一方面,提供了一种车辆,该车辆包括根据前述段落中任一段落所述的设备或根据前述段落之一所述的系统。
根据本发明的另一方面,提供了一种控制车辆后轮转向的方法,该方法包括:接收第一信号,第一信号指示请求转向角;以及接收第二信号,第二信号指示从至少第一模式和第二模式中选择的选择模式;根据第一信号和第二信号确定建议后轮转向角;以及使后轮以建议后轮转向角转向。这提供了以下优点:后轮的转向可以针对选择模式进行优化,例如以使车辆的操纵性或稳定性最大化,并且可以针对车辆正在行驶的地形进行优化。
在一些实施方式中,该方法包括:接收指示车辆当前速度的第三信号,并且根据第三信号来确定建议后轮转向角。这提供了以下优点:后轮的转向可以针对车辆正在地形上行驶的速度进行优化,例如以使车辆的操纵性或稳定性最大化。
在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积。增益值取决于由第二信号指示的选择模式。
在一些实施方式中,该方法包括根据当前速度是低于阈值速度还是高于阈值速度来选择增益值。这提供了以下优点:后轮的转向可以被布置成在低于阈值速度的情况下增强操纵性和/或在高于阈值速度的情况下增加稳定性。
在一些实施方式中,该方法包括:根据当前速度低于阈值速度,使后轮以与前轮转向角异相的建议后轮转向角转向;以及根据当前速度高于阈值速度,使后轮以与前轮转向角同相的建议后轮转向角转向。这提供了以下优点:后轮的转向在低于阈值速度的情况下增强操纵性,并且在高于阈值速度的情况下增加稳定性。
在一些实施方式中,该方法包括根据选择模式来选择阈值速度。这提供了以下优点:在稳定性不太重要的地形上,可以在高达相对高的阈值速度的情况下向车辆提供增强的操纵性,而在稳定性更成问题的地形上,可以在低至相对低的阈值速度的情况下提供增加的稳定性。
在一些实施方式中,该方法包括根据车辆正在行驶的地面的检测特征或响应于用户输入装置处的输入来产生第二信号。
在一些实施方式中,该方法包括:将车辆的当前状态确定为多个预定义状态之一,并且确定取决于当前状态的建议后轮转向角。预定义状态包括以下中至少之一:低牵引力状况;以超过阈值侧倾角的侧倾角取向;沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮的转向。
根据本发明的另一方面,提供了一种计算机程序,该计算机程序在由处理器执行时使处理器执行根据前述段落中任一段落所述的方法。
根据本发明的又一方面,提供了一种存储有指令的非暂态计算机可读存储介质,指令在处理器上执行时使处理器执行根据前述段落中任一段落所述的方法。
根据本发明的另一方面,提供一种用于控制车辆转向的设备,该设备包括控制装置,该控制装置被配置成进行以下操作:接收第一信号,第一信号指示请求转向角;以及接收第二信号,第二信号指示选择模式;根据第一信号和第二信号确定建议转向角;以及提供输出信号,输出信号被配置成使车轮以转向建议角转向。
在一些实施方式中,选择模式是从多个不同地形模式中选择的,每种模式适合于相应类型的地形。
根据本发明的一个方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,控制装置被配置成进行以下操作:确定车辆的向后移动状况;确定车辆的俯仰角;根据请求转向角、车辆的俯仰角和车辆的向后移动状况确定建议后轮转向角;以及提供输出信号,该输出信号被配置成根据建议后轮转向角控制后轮转向。
这提供了以下优点:当车辆沿斜坡下行向后移动时,可以以使得车辆能够被更容易地保持在期望路径上的方式使后轮转向。在斜坡非常陡的情况下,这可以使车辆能够被更容易地保持在防止车辆翻滚的沿斜坡向下的路径上。
在一些实施方式中,控制装置被配置成:根据俯仰角小于第一阈值俯仰角确定与前轮转向角异相的建议后轮转向角;以及根据俯仰角大于第一阈值俯仰角确定与前轮转向角不异相的建议后轮转向角。这提供了以下优点:在不太陡的斜坡上给车辆提供有增加的操纵性,但是当沿较陡斜坡倒车下行时更易于控制车辆。
在一些实施方式中,控制装置被配置成:接收指示从至少第一模式和第二模式中选择的选择模式的信号;以及当俯仰角大于第一阈值俯仰角时,根据第一模式被选择而确定与前轮转向角异相的建议后轮转向角,并且根据第二模式被选择而确定与前轮转向角不异相的建议后轮转向角。这提供了以下优点:当车辆处于诸如柏油路等易于控制车辆的地形上时,可以继续为车辆提供增强的操纵性,但是在其他地形例如沙丘或草地、碎石、雪或泥上,可以使后轮转向以使沿较陡斜坡的倒车下行更容易控制。
在一些实施方式中,控制装置被配置成根据第二模式被选择来确定零度的建议后轮转向角。
在一些实施方式中,控制装置被配置成从地形估计系统接收指示选择模式的信号,地形估计系统被配置成根据车辆正在行驶的地面的的检测特征来产生信号。这提供了以下优点:后轮的转向根据车辆正在行驶的地形而自动改变。
在一些实施方式中,可以根据确定车辆的车轮与车轮所接触的地面之间的摩擦力高于第一摩擦力阈值而选择第一模式,并且可以根据确定所述摩擦力低于第一摩擦力阈值而选择第二模式。这提供了以下优点:当车辆处于诸如柏油路的提供高抓地力的地形上时,可以继续为车辆提供增强的操纵性,而在提供较少抓地力的其他地形上,可以以使沿斜坡的倒车下行更容易控制的方式使后轮转向。
在一些实施方式中,可以根据确定车轮所接触的地面能够由车辆的车轮引起变形而选择第二模式。这提供了以下优点:可以优化后轮的转向以使沿由诸如沙子的材料形成的斜坡倒车下行更容易控制。
在一些实施方式中,设备被配置成从用户输入装置接收指示选择模式的信号。
在一些实施方式中,根据选择模式来确定车辆的至少一个性能特征,所述至少一个性能特征包括由以下组成的组中的至少之一:油门踏板映射;变速器映射;稳定性控制设置。
在一些实施方式中,建议后轮转向角是前轮转向角和增益值的乘积,并且控制装置被配置成:根据俯仰角低于第一阈值俯仰角,利用第一增益值确定第一建议后轮转向角;以及根据俯仰角大于第二阈值俯仰角,利用第二增益值确定第二建议后轮转向角,第二增益值的大小小于第一增益值。第二增益值可以为正或负,并且其也可以与第一增益值相同。
在一些实施方式中,控制装置被配置成根据确定俯仰角大于第二阈值俯仰角来确定建议后轮转向角为零。
在一些实施方式中,根据确定向后移动状况和大于第三阈值俯仰角的俯仰角,确定与转向输入成比例的建议后轮转向角,并且确定与转向输入成比例且小于后轮转向角的建议前轮转向角。
在一些实施方式中,根据确定向后移动状况和大于第三阈值俯仰角的俯仰角,使前轮转向锁定并且确定与转向输入成比例的建议后轮转向角。
在一些实施方式中,控制装置被配置成根据接收到指示车辆的向后移动的信号和/或接收到指示车辆的倒档被选择的信号来确定向后移动状况。这样提供了以下优点:当如由倒档选择所指示的有意进行倒车时,以及当由于例如在具有低摩擦力和/或可变形表面的陡坡上的失败爬坡引起倒车时,可以更容易使车辆沿斜坡下行向后转向。
在一些实施方式中,控制装置被配置成将车辆的当前状况确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;并且预定义状况包括以下中至少之一:低牵引力状况;以超过阈值侧倾角的侧倾角取向。
在一些实施方式中,控制装置被配置成当俯仰角超过第四阈值俯仰角时确定车辆不处于低牵引力状况。这提供了以下优点:如果车辆由于例如在具有低摩擦力和/或可变形表面的陡坡上的失败爬坡而停止,则控制装置将后轮的转向控制成针对沿斜坡下行的向后倒车优化,而不是错误地确定车辆被卡住。
在一些实施方式中,控制装置包括存储有指令的电子存储器装置以及电子处理器,电子处理器电耦接到电子存储器装置并且被配置成访问电子存储器装置并执行指令。
根据本发明的另一方面,提供了一种系统,该系统包括根据前述段落中任一段落所述的设备以及至少一个致动器,所述至少一个致动器用于响应于输出信号来控制车辆的后轮的转向角。
根据本发明的又一方面,提供了一种车辆,其包括根据前述段落中任一段落所述的设备或根据前述段落所述的系统。
根据本发明的另一方面,提供了一种用于控制车辆后轮转向的方法,该方法包括:确定车辆的向后移动状况;确定车辆的俯仰角;根据请求转向角、车辆的俯仰角和车辆的向后移动状况确定建议后轮转向角;以及根据建议后轮转向角控制后轮转向。
这提供了以下优点:当车辆沿斜坡下行向后移动时,以使得车辆能够被更容易地保持在期望路径上的方式使后轮转向。在斜坡非常陡的情况下,这可以使车辆能够被更容易地保持在防止车辆翻滚的沿斜坡向下的路径上。
在一些实施方式中,该方法包括:根据俯仰角小于第一阈值俯仰角确定与前轮转向角异相的建议后轮转向角;以及根据俯仰角大于第一阈值俯仰角确定与前轮转向角不异相的建议后轮转向角。这提供了以下优点:在不太陡的斜坡上车辆更容易被操纵,但是当沿较陡斜坡倒车下行时更易于控制车辆。
在一些实施方式中,该方法包括:接收指示从至少第一模式和第二模式中选择的选择模式的信号;以及当俯仰角大于第一阈值俯仰角时,根据所选择的第二模式确定与前轮转向角不异相的建议后轮转向角,并且根据所选择的第一模式确定与前轮转向角异相的建议后轮转向角。这提供了以下优点:当车辆处于诸如柏油路的易于控制车辆的地形上时,可以继续为车辆提供增强的操纵性,但是在其他地形如沙丘或草、碎石、雪或泥土上,可以使后轮转向以使沿较陡斜坡的倒车下行更容易控制。
在一些实施方式中,该方法包括从地形估计系统接收指示选择模式的信号,该地形估计系统被配置成根据所车辆正在行驶的地面的检测特征来产生信号。这提供以下优点:后轮的转向根据车辆正在行驶的地形而自动改变。
在一些实施方式中,根据确定车辆的车轮与车轮所接触的地面之间的摩擦力高于第一摩擦力阈值而选择第一模式;以及根据确定所述摩擦力低于第一摩擦力阈值而选择第二模式。这提供以下优点:当车辆处于诸如柏油路的提供高抓地力水平的地形上时,可以继续为车辆提供增强的操纵性,而在提供较少抓地力的其他地形上时,可以以使沿斜坡的倒车下行更容易控制的方式使后轮转向。
在一些实施方式中,根据确定与车轮所接触的地面能够由车辆的车轮引起变形而选择第二模式。这提供了以下优点,可以优化后轮的转向以使沿由诸如沙子的材料形成的斜坡的倒车下行更容易控制。
在一些实施方式中,根据用户输入装置处的用户输入来产生指示选择模式的信号。
在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积,并且该方法包括:根据俯仰角小于阈值俯仰角,利用第一增益值来确定第一建议后轮转向角;以及根据俯仰角大于第二阈值俯仰角,利用第二增益值来确定第二建议后轮转向角,第二增益值小于第一增益值。
在一些实施方式中,该方法包括根据确定俯仰角大于第二阈值俯仰角而确定建议后轮转向角为零。
在一些实施方式中,该方法包括:将车辆的当前状态确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;以及预定义状况包括以下中的至少之一:低牵引力状况;以大于阈值侧倾角的侧倾角取向。
根据本发明的另一方面,提供了一种计算机程序,该计算机程序在被处理器执行时使处理器执行根据前述段落中的任一段落所述的方法。
根据本发明的又一方面,提供了一种存储有指令的非暂态计算机可读存储介质,指令当处理器上执行时使处理器执行根据前述段落中的任一段落所述的方法。
根据本发明的再一方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,该控制装置被配置成:根据定义车辆的当前状态的多个状态值来确定车辆的状况;以及根据请求转向角和车辆的状况确定建议后轮转向角;以及根据建议后轮转向角使车辆的后轮转向。
在一些实施方式中,状态值包括包含以下的组中的至少两个:侧倾角、俯仰角、纵向速度、纵向加速度、向心加速度、横摆率目标、横摆率测量值、请求转向角和车辆方向指示。
在一些实施方式中,控制装置被配置成将车辆的状况确定为多个预定义状况之一。在一些实施方式中,预定义状况包括标准状况和由以下组成的组中的至少之一:车辆沿斜坡下行向后移动的倒车下行状况;以及车辆以大于阈值侧倾角的侧倾角取向的边坡(bank)状况;低牵引力状况。
根据本发明的一个方面,提供了一种用于控制车辆后轮转向的设备,该设备包括控制装置,该控制装置被配置成:根据接收到的信号确定车辆是否处于低牵引力状况;以及接收指示前轮转向角的第一信号;根据第一信号以及确定车辆是否处于低牵引力状况,确定建议后轮转向角;以及提供输出信号,该输出信号被配置成使后轮以建议后轮转向角转向。这提供了以下优点:如果由于车辆正在行驶的地形提供的牵引力差而导致车辆卡住或仅行进缓慢,则可以通过后轮的转向来模拟被设计成产生额外的抓地力的前轮周期性转向。例如,驾驶员可以在请求动力系产生扭矩的情况下左右摆动方向盘,以清除前轮下方的松散表面层,从而在下方的较硬表面上获得更好的牵引力。后轮可以模拟该动作以在后轮与地面之间另外提供更好的牵引力。
在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积。控制装置被配置成:根据车辆处于低牵引力状况而选择第一增益值以及根据车辆未处于低牵引力状况而选择第二增益值;并且第一增益值大于第二增益值。这提供了以下优点:当试图增加牵引力时,可以使后轮以与前轮的角度更像的角度摆动。
在一些实施方式中,控制装置被配置成根据所满足的一组标准来确定车辆处于低牵引力状况。这提供了以下优点:车辆能够自动确定适合于低牵引力状况的建议后轮转向角。例如,不需要用户在用户输入装置处提供输入以利用适合于增加牵引力的较大的第二增益值来使后轮转向。
在一些实施方式中,标准之一包括确定前轮转向角以高于阈值频率的频率摆动。
在一些实施方式中,标准之一包括从动力系请求扭矩的指示。
在一些实施方式中,控制装置被配置成:接收指示车辆的测量横摆率的信号,以及根据前轮转向角、后轮转向角和车辆的速度指示来计算目标横摆率;并且标准之一包括车辆的测量横摆与大于阈值的目标横摆之间的差。这提供了以下优点:控制装置能够准确地确定车辆是否处于低牵引力状况。
在一些实施方式中,控制装置被配置成接收选择模式的指示,并且当确定车辆处于低牵引力状况时,控制装置被配置成根据选择模式确定后轮的建议转向角。这提供了以下优点:例如,在当前选择模式(例如在粗糙的岩石地形上使用的模式)不合适时,不必使用在车辆卡在沙子或泥土中时将有助于释放车辆的后轮转向。
在一些实施方式中,响应于用户输入或响应于地形传感器信号来选择选择模式。
在一些实施方式中,当确定车辆处于低牵引力状况时,控制装置被布置成提供输出信号,该输出信号被配置成使后轮的转向与前轮的转向异相。这提供了以下优点:当车辆的牵引力得到提高时,后轮中用于获得更大牵引力的附加转向只会使车辆转弯更快,而如果后轮与前轮同相转向,当车辆的牵引力提高时,车辆可能会突然移动至转向方向的一侧。
在一些实施方式中,控制装置被配置成将车辆的当前状态确定为多个预定义状态之一并且确定取决于当前状态的建议后轮转向角;并且预定义状态包括以下至少之一:以大于阈值侧倾角的侧倾角取向;以大于阈值俯仰角的俯仰角沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮的转向。
在一些实施方式中,控制装置包括:电子存储器装置,并且在该电子存储器装置中存储有指令;电子处理器,该电子处理器电耦接至电子存储器装置并且被配置成访问电子存储器装置并执行指令。
根据本发明的另一方面,提供了一种用于控制车辆的后轮的转向的系统,该系统包括根据前述段落中的任一段落所述的设备以及至少一个致动器,所述至少一个致动器用于响应于输出信号来控制车辆的后轮的转向角。
在一些实施方式中,该系统包括被配置成感测车辆的横摆率的感测装置。
在一些实施方式中,感测装置包括陀螺仪。
根据本发明的另一方面,提供了一种车辆,该车辆包括根据前述段落中的任一段落所述的设备或根据前述段落中的任一段落所述的系统。
在一些实施方式中,车辆包括用于控制车辆的前轮的转向角的转向机构,该转向机构包括手动操作装置,手动操作装置被配置成使得能够调节转向机构。
根据本发明的另一方面,提供了一种利用前轮转向和后轮转向来控制车辆后轮转向的方法,该方法包括:根据接收到的信号确定车辆是否处于低牵引力状况;接收指示前轮转向角的第一信号;根据第一信号和确定车辆是否处于低牵引力状况,确定建议后轮转向角;以及使后轮以建议后轮转向角转向。这提供了以下优点:如果由于车辆正在行驶的地形提供的牵引力差而导致车辆卡住或仅行进缓慢,则可以通过后轮的转向来模拟被设计成产生额外的抓地力的前轮周期性转向。
在一些实施方式中,建议后轮转向角是前轮转向角与增益值的乘积;根据确定车辆处于低牵引力状况而选择第一增益值;根据确定车辆不处于低牵引力状况而选择第二增益值;并且第一增益值大于第二增益值。这提供了以下优点:当试图增加牵引力时,可以使后轮以与前轮的角度更像的角度摆动。
在一些实施方式中,根据所满足的一组标准来确定车辆处于低牵引力状况。这提供了以下优点:能够自动确定适合于低牵引力状况的建议后轮转向角。
在一些实施方式中,标准之一包括确定前轮转向角以高于阈值频率的频率摆动。
在一些实施方式中,标准之一包括所请求的扭矩的指示。
在一些实施方式中,该方法包括:接收指示车辆的测量横摆率的信号,以及根据前轮转向角、后轮转向角和接收到的车辆的速度指示来计算目标横摆率;并且标准之一包括车辆的测量横摆与大于阈值的目标横摆之间的差。这提供了以下优点:控制装置能够准确地确定车辆是否处于低牵引力状况。
在一些实施方式中,该方法包括接收选择模式的指示,并且根据选择模式确定后轮的建议转向角。这提供了以下优点:例如,在当前选择模式(例如在粗糙的岩石地形上使用的模式)不合适时,不必使用在车辆卡在沙子或泥土中时将有助于释放车辆的后轮转向。
在一些实施方式中,响应于用户输入或响应于地形传感器信号来选择选择模式。
在一些实施方式中,当确定车辆处于低牵引力状况时,该方法包括使后轮的转向与前轮的转向异相。这提供了以下优点:当车辆的牵引力得到提高时,后轮中用于获得更大牵引力的附加转向只会使车辆转弯更快,而如果后轮与前轮同相转向,当车辆的牵引力提高时,车辆可能会突然移动至转向方向的一侧。
根据本发明的又一方面,提供了一种计算机程序,该计算机程序在由处理器执行时使处理器执行根据前述段落中的任一段落所述的方法。
根据本发明的又一方面,提供了一种其中存储有指令的非暂态计算机可读存储介质,该指令在处理器上被执行时使处理器执行根据前述段落中的任一段落所述的方法。
根据本发明的一个方面,提供了一种用于控制车辆的转向的设备,该设备包括控制装置,该控制装置被配置成:接收指示请求转向角的第一信号;接收指示车辆的侧倾角的第二信号;根据第一信号确定车辆的可转向轮的建议转向角;以及提供输出信号,该输出信号被配置成使可转向轮以建议转向角转向;其中,根据所满足的一组标准,控制装置被配置成根据第二信号来确定建议转向角。这提供了以下优点:对驾驶员来说更容易保持沿边坡的期望路径(例如在边坡上方恒定的高度)。
在一些实施方式中,控制装置被配置成根据接收到指示增大的侧倾角的第二信号来增大建议转向角。这提供了以下优点:随着边坡的陡度变化,控制装置能够自动补偿边坡对车辆的变化影响,并且因此更容易维持沿边坡的期望路径。
在一些实施方式中,从转向输入传感器接收第一信号,该转向输入传感器被配置成接收用户请求的转向角。
在一些实施方式中,该设备被配置成控制车辆后轮转向。
在一些实施方式中,第一信号指示前轮转向角,并且建议转向角是建议后轮转向角。
在一些实施方式中,根据标准被满足,控制装置被配置成根据指示前轮转向角为零的第一信号来确定非零后轮转向角。这提供了以下优点:驾驶员能够在不转动方向盘的情况下保持沿边坡的直的路径。
在一些实施方式中,非零后轮转向角被布置成根据侧倾角为正(这对应于车辆的左侧相对于车辆的右侧升高)而将车辆的后部转至右侧;并且非零后轮转向角被布置成根据侧倾角为负将车辆的后部转至左侧。这提供了以下优点:后轮使车辆的后部向边坡下方转向,以使车辆稍微向边坡上方成角度,并且使车辆在沿边坡的路径上行驶。
在一些实施方式中,根据标准被满足,控制装置被配置成根据接收到指示增大小于阈值角的前轮转向角的第一信号来减小后转向轮的建议转向角。这提供了以下优点:后轮转向能够平稳地过渡到标准模式,以使得驾驶员能够平稳地改变车辆的行驶路线,例如离开边坡。
在一些实施方式中,根据标准被满足,控制装置被配置成根据接收到指示增大大于阈值角的前轮转向角的第一信号来增大后转向轮的建议转向角。这提供了以下优点:当转向角大于阈值角时,对转向的控制过渡到更敏捷的模式。
在一些实施方式中,根据一组标准中的一个标准未满足,控制装置被配置成在第一信号指示前轮转向角为零时确定后轮转向角为零。这提供了以下优点:除非该组标准中的所有标准被满足——这指示车辆正在驶过边坡,否则后轮转向能够以常规方式进行操作。
在一些实施方式中,根据一组标准中的一个标准未被满足,控制装置被配置成当接收到的第一信号指示增大大于或小于阈值角的前轮转向角时,增大后转向轮的建议转向角。
在一些实施方式中,控制装置被配置成接收模式信号,并且当标准被满足时,控制装置被配置成根据模式信号来确定后转向轮的建议转向角。这提供了以下优点:可以以期望最适当地补偿边坡对车辆的影响的方式来控制后轮转向。例如,当车辆沿边坡行驶并且前轮以零度转向时,后轮可以在用于在沙子上行驶的模式下以相对大的角度转向,而在用于在坚硬的地面上行驶的模式下以相对较小的角度或零度转向。
在一些实施方式中,模式信号响应于用户输入而生成或者响应于地形传感器信号而生成。
在一些实施方式中,控制装置被配置成确定后转向轮的建议转向角,该建议转向角是前轮转向角与增益值的乘积;增益值取决于所有标准是否被满足;并且控制装置被配置成根据从一个标准也不满足到所有标准被满足的变化,使得在第一增益值与第二增益值之间逐渐过渡。这提供了以下优点:当车辆以平稳的方式驶上边坡时,转向会自动进行调整,从而使用户能够容易地保持车辆方向的控制。
在一些实施方式中,该组标准包括第二信号,第二信号指示大于阈值角的侧倾角。
在一些实施方式中,该组标准包括侧倾角在限定的时间段内连续大于阈值角。这提供了以下优点:如果车辆以从大于阈值角摆动到小于阈值角的角度沿边坡行驶,则转向确实会迅速变动。
在一些实施方式中,控制装置被配置成:接收指示车辆的当前速度的速度信号;并且该组标准包括指示当前速度小于阈值速度的速度信号。
在一些实施方式中:控制装置被配置成将车辆的当前状况确定为多个预定义状况之一,并且确定取决于当前状况的建议后轮转向角;并且预定义状况包括以下中的至少之一:低牵引力状况;以大于阈值俯仰角的俯仰角沿斜坡下行向后移动。这提供了以下优点:可以针对车辆的当前状况优化后轮转向。
在一些实施方式中,控制装置包括:电子存储器装置,并且在该电子存储器装置中存储有指令;电子处理器,该电子处理器电耦接至电子存储器装置并且被配置成访问电子存储器装置并执行指令。
根据本发明的另一方面,提供了一种用于控制车辆的转向的系统,该系统包括根据前述段落中的任一段落所述的设备以及至少一个致动器,该至少一个致动器用于响应于输出信号来控制车辆的车轮的转向角。
根据本发明的又一方面,提供了一种车辆,该车辆包括根据前述段落中的任一段落所述的设备或根据前述段落所述的系统。
根据本发明的另一方面,提供了一种用于控制车辆的转向的方法,该方法包括:根据请求转向角确定车辆的可转向轮的建议转向角;以及提供输出信号,该输出信号被配置成使可转向轮以建议转向角转向;其中,根据一组标准被满足,根据车辆的侧倾角来确定建议转向角。这提供了以下优点:对驾驶员来说,更容易保持沿边坡的期望路径(例如在边坡上方恒定的高度)。
在一些实施方式中,方法包括根据接收到指示增加侧倾角的第二信号来增加建议转向角。这提供了以下优点:随着边坡的陡度变化,边坡对车辆的变化影响得到补偿,并且因此更容易保持沿边坡的期望路径。
在一些实施方式中,输出信号被配置成控制车辆后轮转向。
在一些实施方式中,所述第一信号指示前轮转向角,并且建议转向角是建议后轮转向角。
在一些实施方式中,根据标准被满足,方法包括:根据指示前轮转向角为零的所述第一信号来确定非零后轮转向角;以及根据接收到指示增大低于阈值角的前轮转向角的第一信号来减小后可转向轮的建议转向角。这提供了以下优点:驾驶员能够在不转动方向盘的情况下维持沿边坡的直的路径,以及平滑地转变成标准模式,以使得驾驶员能够平滑地改变车辆的线路,例如离开边坡。
在一些实施方式中,一组标准之一是第二信号指示大于阈值角的侧倾角。
在一些实施方式中,一组标准之一是侧倾角在限定的时间段内连续地高于阈值角。这提供了以下优点:在车辆沿着以从大于阈值角摆动至小于阈值角的角度沿边坡行驶,转向确实迅速地变动。
在一些实施方式中,一组标准之一是当前速度低于阈值速度。
根据本发明的另一方面,提供了一种计算机程序,其在由处理器执行时使处理器执行根据前面段落中任一段落所述的方法。
根据本发明的又一方面,提供了其中存储有指令的非暂态计算机可读存储介质,该指令在处理器上执行时使处理器执行根据前面段落中任一段落所述的方法。
根据本发明的一方面,提供了用于车辆的转向系统的控制系统,该控制系统包括一个或更多个控制器,该控制系统被配置成将减速时间值与目标时间值进行比较,其中,减速时间值指示直到车辆的速度达到零的预测持续时间,并且根据比较输出控制方向盘的转向角的控制信号,使得方向盘在车辆速度达到零时被控制成朝向向前直行状况转动。
这提供了不会使轮“空转”的好处,并且另外的好处是不会过度地限制转向角,使得操纵性提高。这在转向系统是后轮转向系统的控制系统中是特别有利的,这是因为部件和致动器与在前轮转向系统中相比可以具有更小的机械性能和电气性能。
在一些实施方式中,控制系统被配置成根据减速时间值等于或小于目标时间值,或者换言之,根据目标时间值等于或大于减速时间值,输出控制信号。
在本发明的实施方式中,目标时间值可以是存储在一个或更多个控制器的存储器内的预定时间值。
在前述实施方式的替选实施方式中,目标时间值包括致动器时间值,该致动器时间值指示车辆的方向盘返回到向前直行状况的持续时间。优选地,根据当前致动器位移和致动器速率来确定致动器时间值。
致动器速率可以是存储在一个或更多个控制器的存储器中的预定值,替选地,可以根据表面摩擦值和车辆质量值中的至少之一来确定致动器速率。
目标时间值还可以包括可调时间值,其优选地至少部分地根据控制系统内的估计等待时间来确定。
还可以至少部分地根据以下中的至少一项来动态地确定可调时间值:当前车辆速度,当前车辆加速度,表面摩擦值和车辆质量值。
可调时间值可以是存储在一个或更多个控制器的存储器内的预定时间值。
在本发明的一些实施方式中,向前直行状况可以在与车辆的纵轴平行的-3.5度至3.5度的范围内。
在本发明的实施方式中,控制系统可以被配置成接收指示当前车辆速度的速度信号、指示当前车辆加速度的加速度信号,并且根据接收到的速度信号和加速度信号来确定减速时间值。
替选地,控制系统可以被配置成接收指示时间段期间的车辆速度的多个速度信号,并且根据接收到的多个速度信号来确定减速时间值。
在一些实施方式中,控制信号优先于正常使用控制信号。
在一些实施方式中,控制系统被配置成接收指示车辆的行驶模式的行驶模式信号,根据行驶模式信号不输出控制信号。行驶模式可以是岩石爬行模式(rock crawlmode)。
根据本发明的一方面,提供了转向系统,其包括根据前述方面所述的控制系统。
在一些实施方式中,转向系统包括转向致动器。
根据本发明的一方面,提供了一种车辆,其包括根据前述方面所述的控制系统或转向系统。优选地,车辆是后轮转向车辆或全轮转向车辆。
根据本发明的一方面,提供了控制车辆的转向系统的方法,该方法包括:将减速时间值与目标时间值进行比较,其中,减速时间值指示直到车辆的速度达到零的预测持续时间,并且根据比较控制方向盘的转向角,使得方向盘在车辆速度达到零时返回到向前直行状况。
在本申请的范围内,明确地表示的是,在前述段落中、权利要求中和/或下面的描述和附图中阐述的各个方面、实施方式、示例和替选方案以及尤其其各个特征可以被独立地采用或者任意组合地采用。即,所有的实施方式和/或任何实施方式中的特征可以按任何方式和/或组合来进行组合,除非这些特征不兼容。申请人保留更改任何原始提交的权利要求或者相应地提交任何新权利要求的权利,包括将任何原始提交的权利要求修改成引用和/或合并任何其他权利要求的任何特征的权利,尽管并非最初以该方式要求保护。
附图说明
现在将参照附图仅通过示例的方式来描述本发明的一个或更多个实施方式,在附图中:
图1示出了实施本发明的车辆的顶视图;
图2示出了实施本发明的另一车辆的顶视图;
图3示出了示出实现图1和图2的车辆的转向的系统的框图;
图4示出了说明由图3中示出的控制装置执行的功能的框图;
图5示出了以相对高的速度行驶的车辆的平面图;
图6示出了以相对低的速度行驶的车辆的平面图;
图7示出了说明转向角确定装置响应于对车辆处于其标准状况的确定的操作的图;
图8示出了示出实施本发明的并且可由控制装置执行以控制车辆的后轮的转向的方法的流程图;
图9示出了方法的流程图,其提供了图8中示出的方法的具体示例;
图10示出了以相对低的速度沿着倾斜地面表面下行向后行驶的车辆的平面图;
图11示出了转向角确定装置响应于对车辆处于其倒车下行状况的确定的操作的图;
图12示出了说明实施本发明的并且可由控制装置执行以控制车辆的后轮在沿着斜坡倒车下行时的转向的方法的流程图;
图13示出了示出方法的流程图,其提供了图12中示出的方法的示例;
图14示出了示出方法的流程图,其提供了图12中示出的方法的替选示例;
图15示出了以相对低的速度向前移动的车辆的平面图;
图16和图17示出了在车辆被卡住或由于低牵引力而进行仅非常缓慢的进程时用于释放车辆的过程期间的车辆的平面图;
图18示出了在确定车辆处于低牵引力状况时的转向角确定装置和状态检测装置的操作的图;
图19示出了示出实施本发明的并且可由控制装置执行以控制车辆的后轮在车辆处于低牵引力状况时的转向的方法的流程图;
图20示出了示出方法的流程图,其提供了图19示出的方法的示例;
图21示出了示出方法的流程图,其提供了由图20示出的方法的示例;
图22示出了在其标准状况下沿向前方向上行驶的平面图;
图23示出了在其边坡状况下沿向前方向上行驶的车辆的平面图;
图24示出了说明在确定车辆处于边坡状况时转向角确定装置和状态检测装置的操作的图;
图25示出了用于这样的具有线控转向前轮的车辆的转向角确定装置的操作的示例;
图26示出了说明实施本发明的并且可由控制装置执行以控制车辆的后轮在其边坡状况下的转向的方法的流程图;
图27示出了说明在图26的方法中执行的处理的流程图;
图28示出了说明在图26的方法中执行的其他处理的流程图;以及
图29示出了说明在图28中示出的处理中执行的操作的流程图;
图30a示出了说明实现图1和图2的车辆的转向的控制系统的框图;
图30b示出了说明实现图1和图2的车辆的转向的控制系统的框图;
图30c示出了说明实现图1和图2的车辆的转向的控制系统的框图;
图31a示出了说明实现图1和图2的车辆的转向的控制系统的框图;
图31b示出了说明实现图1和图2的车辆的转向的控制系统的框图;
图31c示出了说明实现图1和图2的车辆的转向的控制系统的框图;
图31d示出了说明实现图1和图2的车辆的转向的控制系统的框图。
具体实施方式
在图1的顶视图中示出了实施本发明的车辆100。车辆100是被配置成用于在各种类型的地形上在道路上以及越野上使用的汽车。在本实施方式中,车辆100是四轮驱动车辆,但是应当认识到,以下描述的车辆100的特征中的许多特征也适用于后轮驱动车辆。
图1在某种程度上还示意性地示出了被配置成实现车辆100的转向的系统101。系统101包括被配置成使车辆100的后道路轮103转向的致动器102,并且还包括包含用于控制致动器102的操作的控制装置105的设备104。
在本实施方式中,车辆100的前道路轮106借助于包括方向盘108的机构107转向,机构107经由转向柱110连接至小齿轮109。小齿轮109与齿条111接合,齿条111通过拉杆113连接至转向节112。
后轮103可通过由致动器102操作的机构114转向。在本实施方式中,致动器102被配置成驱动与第二齿条116相关联的第二小齿轮115,该第二齿条116经由拉杆118向后轮103的转向节117提供力。
转向输入传感器119被配置成感测方向盘108的取向并且向控制装置105提供指示方向盘108的取向并且因此还指示前道路轮106的取向的信号。控制装置105被配置成根据从转向输入传感器119接收的信号向致动器102提供输出信号,以使后轮103转向。然而,提供给致动器102的输出信号还取决于由控制装置105接收的其他信号,如下面将详细描述的。
在图2中示出了实施本发明的替选车辆100,其中系统101实现了车辆100的所有轮103、106的“线控转向”。图2的车辆100具有与图1的车辆共同的、已经以相同附图标记提供的许多特征。因此,如图1的车辆100,图2的车辆100包括系统101,该系统101包括小齿轮109以及被配置成经由拉杆113操作转向节112以使前轮106转向的齿条112。第一致动器102被配置成驱动与第二齿条116相关联的第二小齿轮115,该第二齿条116经由拉杆118向后轮103的转向节117提供力。
然而,在图2的实施方式中,用于驱动前轮106的小齿轮109由第二致动器202驱动。方向盘108安装在可旋转轴201上,但是未机械地连接至小齿轮109。而是,除了向致动器102提供信号以使后轮103转向之外,控制装置105还被配置成根据其从位于方向盘108的轴201上的转向输入传感器119接收的信号向第二致动器202提供信号以使前轮106转向。
在替选实施方式中,车辆100具有如图2的那些一样线控转向的前轮,但是后轮103不可转向。
图1的系统101和图2的系统101由图3中示出的框图示出。控制装置105包括电子处理器301和电子存储装置302,该电子存储装置302存储可由处理器301执行以使处理器301执行下述方法并且向第一转向致动器102输出信号以使后轮103转向的指令303。在图2的车辆100的情况下,处理器301还向第二转向致动器202提供信号以使前轮106转向。尽管在图3中示出了仅一个处理器和存储装置,但是应当理解,控制装置105可以包括若干处理器301和/或若干电子存储装置302,使得如下所述的处理可以分布在若干处理器上。
除了从转向输入传感器119接收信号之外,控制装置105还从轮速度感测装置304接收指示每个道路轮103、106的旋转的速度的信号。轮速度感测装置304可以包括轮速度传感器,轮速度传感器中的每一个被布置成测量轮103、106中的相应一个轮的旋转的速度,并且将旋转的速度的值直接提供给控制装置105。替选地,轮速度传感器可以形成另一系统例如包括如下控制单元的防抱死制动系统(未示出)的一部分,该控制单元被配置成从轮速度传感器接收信号并且向控制装置105提供轮速度值。
控制装置105还从惯性测量单元(IMU)305接收信号,该惯性测量单元305在本实施方式中包括六个自由度IMU。IMU 305包括被配置成测量车辆100的纵向加速度(a
在本实施方式中,车辆100包括用于控制车辆100的子系统的若干电子控制单元。例如,车辆100包括:引擎控制单元(ECU)307,其用于控制车辆100的引擎(未示出)的操作;变速器控制单元(TCU)308,其用于控制档选择;以及悬架控制单元(SCU)309,其用于控制悬架子系统(未示出)的特性。子系统中的每一个能够在若干不同的模式下工作,并且车辆100包括被配置成控制子系统操作所处的模式的车辆控制系统310。例如,引擎控制单元307可以由车辆控制系统310控制以使用从若干不同的映射中选择的加速器踏板映射来操作;变速器控制单元308可以被控制成使用从若干不同的映射中选择的变速器映射来操作;以及悬架控制单元309可以被控制成使用从若干不同的组中选择的一组稳定性控制设置来操作。
根据用户的驾驶风格或车辆100正在行驶的地形的类型,一个特定的加速器踏板映射可能比其他加速器踏板映射更合适,并且类似地,一个特定的变速器映射和一组特定的稳定性控制设置可能是最适合的。为了使用户能够选择对于所选择的驾驶风格或特定地形最合适的设置,车辆100还包括用户输入装置(UID)311,该用户输入装置(UID)311被配置成使用户能够向车辆控制系统310指示所选择的驾驶模式。例如,当在柏油路上行驶时,用户可以选择标准模式(或正常模式),并且车辆控制系统310控制ECU 307、TCU 308和SCU309在适于柏油路面的模式下操作。替选地,用户可以选择另一模式,例如针对在提供低的摩擦系数的地形上行驶的草、砾石和雪模式,或者针对在提供非常低的摩擦系数的可变形表面例如沙土上行驶的砂土模式,或者针对在具有高摩擦的粗糙表面上行驶的岩石爬行模式。响应于这样的用户指示,车辆控制系统310控制ECU 307、TCU 308和SCU 309在适于所指示的地形类型的模式下操作。通过使用用户输入装置311选择的模式还被提供给控制装置105,并且可以用于确定提供给第一转向致动器102和/或第二转向致动器202的信号。
用户输入装置311可以包括一个或更多个开关、触摸屏装置或适于使用户能够提供他们希望选择的模式的指示的其他电气或电子装置。
车辆控制系统310可以包括地形估计系统(TES)306。这样的系统是已知的并且在申请人的英国专利GB2492655B以及公开为US2014350789A1的美国专利申请中有所描述。地形估计系统310被配置成基于指示车辆100正在行驶的地形的测量结果来选择对于子系统307、308、309最合适的模式的行驶模式,以使得车辆控制系统310能够自动地控制子系统307、308、309在所选择的模式下操作。
TES 306从包括用于提供指示车辆100正在行驶的地形类型的信息的各种不同传感器和装置的地形感测装置312接收信号。地形感测装置312可以包括前述IMU 305、轮速度感测装置304、转向输入传感器119以及其他传感器(未示出),例如环境温度传感器、大气压传感器、引擎扭矩传感器、制动踏板位置传感器、加速器踏板位置传感器、行车高度传感器等。由地形估计系统310使用来自地形感测装置312的各种输出来导出多个地形指示符。例如,从轮速度传感器得出车速,从轮速度传感器得出轮加速度,从IMU 305得出轮上的纵向力,以及从IMU 305的运动传感器得出发生轮滑移(如果发生轮滑移)时的扭矩以检测横摆、俯仰和侧倾。然后,对地形指示符进行处理以确定不同的行驶模式中的每一个为合适的概率,并且从而确定哪个模式对于子系统的操作是最合适的。在其自动模式下,地形估计系统310连续地为每个模式确定该模式为合适的概率,并且根据具有比当前选择的控制模式一致性更高的概率的另一模式,车辆控制系统310命令子系统根据该另一模式操作。
由地形估计系统306自动确定的或通过使用用户输入装置311选择的模式还被提供给控制装置105,并且可以用于确定提供给第一转向致动器102和/或第二转向致动器202的信号。
在图4中示出了说明由控制装置105执行的功能的框图。控制装置105可以包括车辆状态估计装置401,该车辆状态估计装置401从IMU 305接收包括至少车辆100的纵向加速度(a
车辆状态估计装置401处理接收到的数据(即,选择的档、请求转向角以及来自IMU305和轮速度感测装置304的测量结果)以确定并重复更新提供车辆100的当前状态的估计的多个状态值。在本实施方式中,车辆状态估计装置401包括卡尔曼(Kalman)滤波器,该卡尔曼滤波器输入有接收到的数据并且生成状态值中的至少一些状态值。状态值包括车辆在地面上的侧倾角(θ
横摆率目标是车辆100的当前横摆率的估计,并且其是使用通常被称为自行车模型的简单数学模型根据转向角以及车辆100在地面上的纵向速率(V
控制装置105包括状态检测装置402,该状态检测装置402接收由车辆状态估计装置401提供的状态值,以及对当前选择的行驶模式的指示和例如来自油门位置传感器的对动力系扭矩请求的指示。状态检测装置402被配置成分析状态值、选择的行驶模式和动力系扭矩请求,以确定车辆100当前是处于预定义的特殊状况下还是替选地处于标准状况下。在本实施方式中,车辆状态估计装置401被配置成确定车辆100是处于图4中被标记为“倒车下行”、“低牵引力”和“边坡”的三种特殊状况中的任一种还是处于其标准状况。
确定车辆100是处于预定义的特殊状况之一还是处于标准状况的指示被提供至转向角确定装置403。状态值中的一个或更多个例如纵向速率(V
在实施方式诸如图2的实施方式中,其中车辆100是线控转向,转向角确定装置403可以被配置成根据至少请求转向角、由状态检测装置402确定的车辆100的状态以及接收到的状态值来另外确定建议前轮转向角。然后,控制装置105被配置成将用于根据建议前轮转向角来控制前轮转向的输出信号提供给第二转向致动器202。
下面将描述如何检测预定义的特殊状况以及如何确定建议转向角的更多细节。然而,首先将参照图5至图9描述当没有检测到定义的特殊状况时建立的标准状况。
图5和图6分别示出了以相对高的速度和相对低的速度行驶的车辆100的平面图。在图5和图6二者中,前轮106相对于车辆100的纵向轴线5001转动大约15度,以使车辆100向左转动。在图5中,如利用轮速度感测装置304确定的车辆100的当前速度大于阈值速度,并且因此后轮103已经与前轮106同相转向。也就是说,因为前轮106已经向左转动,所以后轮103也向左转动。众所周知,使后轮103与前轮106同相转向为车辆100提供增加的稳定性,这在高速度下是有利的。
在图5中,后轮103仅被向左转向约1.5度,即前轮106所转动的角的十分之一。后轮103已被转向所采用的前轮转向角的比例在本文中被称为增益值。因此,在该示例中,后轮转向具有+0.1(=1.5/15)的增益值。
在图6中,车辆100的当前速度小于阈值速度,并且因此后轮103已经与前轮106异相转向。也就是说,因为前轮106已经向左转动,所以后轮103已经向右转动。车辆100的稳定性在低速度下不是问题,并且众所周知,使后轮103与前轮106异相转向为车辆100提供增加的敏捷性。
后轮103已被向右转向约3度,即前轮106所转动的角的五分之一。因此,在该示例中,后轮转向具有-0.2(=-3/15)的增益值。即,增益值的绝对值(0.2)比大于阈值速度的速度的增益值高,但是由于后轮103与前轮106异相转动因此增益值为负。
在图7中示出了转向角确定装置403响应于确定车辆100处于其标准状况的操作。转向角确定装置403接收车辆100的当前纵向速率(或速度)的指示、当前选择的驾驶模式和请求转向角。转向角检测装置403确定取决于当前驾驶模式的建议后轮转向角。对于每种驾驶模式,用以乘以请求转向角以确定建议后轮转向角的增益值是纵向速率(V
在本示例中,对于在柏油路面上驾驶可以选择第一驾驶模式,对于第一驾驶模式,当纵向速率小于80kmph(每小时公里)的阈值速度时,增益值为-0.2,而当纵向速率大于该阈值速度时,增益值为+0.1。对于在低摩擦表面诸如草、砾石或雪上驾驶可以选择第二驾驶模式,对于第二驾驶模式,当纵向速率小于50kmph的阈值速度时,增益值为-0.1,而当纵向速率大于该阈值速度时,增益值为+0.1。对于在低摩擦、可变形表面诸如沙子上驾驶可以选择第三驾驶模式,对于第三驾驶模式,当纵向速率小于35kmph的阈值速度时,增益值为-0.4,而当纵向速率大于该阈值速度时,增益值为+0.2。
在确定建议后轮转向角之后,通过将请求转向角乘以适当的增益值,转向角确定装置403将用于使后轮以建议转向角转向的输出信号提供给致动器102。
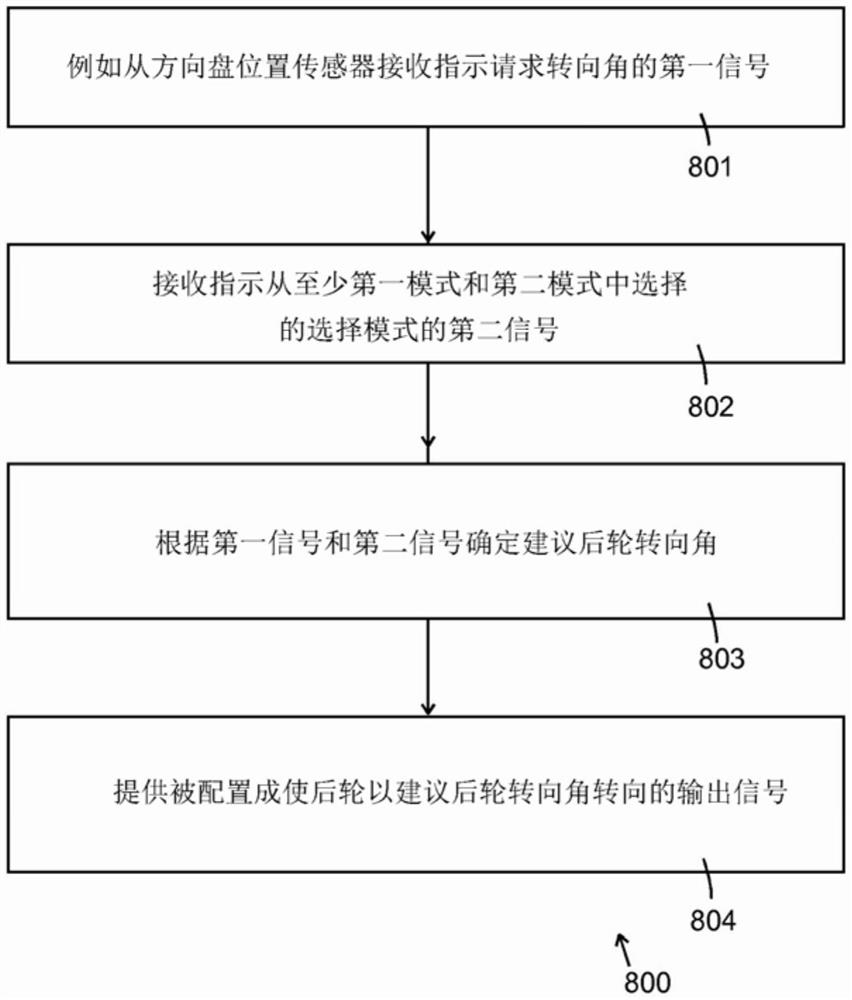
图8中示出了说明实施本发明的并且可由控制装置105执行以控制车辆100的后轮103的转向的方法800的流程图。在方法800的框801处,接收指示请求转向角的第一信号。第一信号可以响应于在诸如具有相关联的位置传感器的方向盘的用户输入装置处的用户输入而产生。替选地,第一信号可以由诸如自动停车系统或自动驾驶系统的车辆自动化系统产生。在图1的实施方式中,请求转向角也可以是车辆100的前轮106相对于其纵向轴线(图5中的5001)转动的角。
在框802处,接收指示从至少第一模式和第二模式中选择的选择模式的第二信号。如上所述,选择模式可以通过在用户输入装置311处的用户输入来选择,或者可以通过地形估计系统310来自动选择。
在框803处,根据第一信号和第二信号确定建议后轮转向角。因此,建议后轮转向角取决于请求转向角,并且也取决于当前选择模式。在框804处,提供被配置成使车辆100的后轮103以建议后轮转向角转向的输出信号。然后可以重复执行方法800,以根据进一步的转向角请求和/或车辆100的驾驶模式的新选择来使后轮103连续地转向。
通过图9中示出的流程图示出了方法900,方法900提供了方法800的具体示例。在方法900的框801处,接收指示请求转向角的第一信号,并且在框802处,接收指示从至少第一模式和第二模式中选择的选择模式的第二信号。因此,方法900的框801和802与以上针对方法800描述的框801和802相同。
在框901处,接收指示车辆100的当前速度或纵向速率(V
在框902处,根据选择模式和第三信号所指示的当前速度来选择增益值。在本实施方式中,这是使用查找表来实现的。从与选择模式相对应的查找表中检索与第三信号所指示的当前速度相对应的增益值。即,对应于车辆速度的增益值被存储在用于每个可选择模式的查找表中,并且在框902处,用于选择模式的查找表用于确定对应于当前车辆速度的增益值。对于小于阈值速度的低速度,增益值为负,而对于较高速度,增益值为正。增益值改变符号所处于的阈值速度取决于选择模式,例如以上参照图7所描述的。在车辆速度落在查找表的两个相邻速度之间的情况下,可以通过线性内插从两个相邻速度的增益值确定相应的增益值。
无论在框902处选择了哪个增益值,然后在框803A处将选择增益值乘以请求转向角以确定建议后轮转向角。然后,在框804处,例如将用于使车辆100的后轮以建议转向角转向的输出信号提供给车辆100的致动器102。
然后可以重复执行方法900的框,以根据进一步的请求转向角、车辆的当前速度和/或车辆100的模式的新选择来使后轮连续地转向。
现在将参照图10至图14描述在图4中标记为倒车下行的车辆100的第一特殊状况。图10示出了以相对低的速度沿着倾斜地面表面1001向下向后行驶的车辆100的平面图。箭头1002指示沿着地面表面1001向下的方向,并且箭头1003表示车辆100的速率,其大致平行于箭头1002。
如以上参照图5和图6所讨论的,已知具有四个可转向轮的车辆使后轮以低速度即从0kmph的速度直至阈值速度与前轮异相转向。还已知当车辆100倒车时使后轮与前轮异相转向。然而,如图10中所示,车辆100可以布置在诸如沙子的某些地形上,以在沿着斜坡倒车下行时使后轮103与前轮同相转向。这防止了车辆100的前部在沿着斜坡下行向后转向时低于所期望地沿着斜坡下行摆动。因此,在这样的情况下,车辆100的稳定性增大,并且车辆易于控制。此外,根据斜坡的陡度和/或其表面提供的摩擦和/或选择的驾驶员模式,车辆100可以被布置成使后轮根本不转向。
图11中示出了当状态检测装置402确定车辆100处于其倒车下行状况时状态检测装置402和转向角确定装置403的操作。状态检测装置402接收:来自车辆状态估计装置401的车辆100的俯仰角(θ
如果纵向速度为负——这指示向后移动,则状态检测装置402确定车辆100处于向后移动状况。向后移动可能是由于车辆100的有意倒退,或者是由于车辆100在其——例如由于坡地具有非常低的摩擦表面或者由于其包括松散的颗粒材料诸如砂土——未能爬升坡地时沿坡地向下向后滑动。在本实施方式中,如果预期车辆方向(通过选择倒档所指示的)是向后的,则即使车辆100静止,状态检测装置402也确定车辆100处于向后移动状况。
根据俯仰角(θ
在本实施方式中,还根据当前选择的驾驶模式来确定建议转向角。例如,根据选择的第一驾驶模式,该第一驾驶模式可以是用于在柏油路面等上驾驶的标准模式,建议后轮转向角通过将负增益值(例如,为标准状况选择的负增益值)乘以请求转向角被确定。因此,后轮103与前轮106异相转向。这为车辆100提供良好的操纵性,这例如在停车时可能是有利的。
可替选地,可以选择第二驾驶模式,第二驾驶模式可以是用于在低摩擦和/或粗糙表面诸如草、砾石、雪、泥泞的有车辙表面或岩石粗糙表面上驾驶的模式。根据选择的这样的第二驾驶模式,可以使用与用于第一驾驶模式的增益值相比具有小的大小的增益值来确定建议后轮转向角。在示例中,用于第二驾驶模式的增益值是零,并且因此使后轮103保持在零度。
可替选地,可以选择第三驾驶模式,第三驾驶模式可以是用于在可变形材料诸如砂土上驾驶的模式。如参照图10所描述的,根据选择的这样的第三驾驶模式,可以将建议后轮转向角确定为请求转向角和正增益值的乘积,使得后轮103与前轮106同相转向。
在替选实施方式——其中所有道路轮103、106如图2的道路轮一样是线控转向——中,在至少一个驾驶模式下,根据确定向后移动状况并确定车辆的俯仰角大于阈值俯仰角,控制装置105通过仅使后轮103转向而使车辆100向后转向。在该实施方式中,转向角确定装置403被配置成使前轮106以零度被锁定在适当的位置并确定与请求转向角成比例的建议后轮转向角。在另一替选实施方式——其中所有道路轮103、106如图2中一样是线控转向——中,在至少一个驾驶模式下,根据确定向后移动状况并确定车辆的俯仰角大于阈值俯仰角,控制装置105使车辆100的转向主要由后轮106执行。在这样的场景下,控制装置105可以使所有道路轮103、106与从转向输入传感器119接收到的请求转向角成比例地转向,但是后轮103转向通过比前轮106大的角。
在图12中示出了流程图,该流程图示出了实施本发明的且可由控制装置105执行以控制车辆100的后轮103在沿坡地向下倒退时的转向的方法1200。在框1201处,确定车辆100的向后移动状况。这可以包括接收指示已经选择了车辆100的倒档或已经检测到车辆100的倒退移动的信号。
在框1202处,确定车辆100的俯仰角。这可以包括从另一处理装置接收指示俯仰角的信号,或者根据从诸如陀螺仪装置或惯性测量单元305的感测装置接收的信号确定俯仰角。
在框1203处,根据车辆100的向后移动状况、请求转向角和俯仰角确定建议后轮转向角。在框1204处,提供被配置成根据建议后轮转向角控制车辆100的后轮103的转向的输出信号。可以将用于控制车辆100的后轮的转向的输出信号提供给致动器102,使得致动器将后轮103转动至建议后轮转向角。
通过图13中示出的流程图示出了提供方法1200的示例的方法1300。在框1201处,确定车辆100的向后移动状况,并且在框1301处,接收指示从至少第一模式和第二模式中选择的驾驶模式的信号。例如,可以从响应于用户选择的用户输入装置311接收信号或者从地形估计系统310接收信号,如以上参照图3所描述的。在框1302处,确定车辆100的俯仰角是否大于阈值俯仰角。如果不是,则在框1305处,根据请求转向角确定与前轮转向角异相的建议后轮转向角。即,建议后轮转向角是前轮转向角和负增益值的乘积。
可替选地,如果在框1302处确定车辆100的俯仰角大于阈值俯仰角,则在框1303处确定当前是否选择了第一模式。例如,第一模式可以指示车辆在如下地形上使用,在该地形上车辆100在沿斜坡向下倒退时的稳定性不是问题。例如,第一模式可以指示车辆100在柏油路上使用和/或指示车辆100的道路轮103、106与地形之间的摩擦高于摩擦阈值。
在实施方式中,在框1302处使用的阈值俯仰角是例如10度的恒定值,但是在其他实施方式中,阈值俯仰角取决于当前选择的驾驶模式。
如果确定选择了第一模式,则执行框1305处的前述过程。可替选地,如果在框1303处确定当前选择了另一模式,例如适合在低摩擦表面或可变形表面诸如砂土上使用的另一模式,则在框1304处确定建议后轮转向角。框1304处的确定产生建议后轮转向角,其并不与前轮转向角异相。如上所述,对于低摩擦表面,可以使用零或接近零(即,小于0.1)的增益值来计算建议转向角,或者对于诸如砂土的可变形表面,可以使用正增益值来计算建议转向角。
当在框1304或框1305处确定建议转向角之后,在框1204处提供被配置成根据建议后轮转向角来控制后轮转向的输出信号。
通过图14中示出的流程图示出了提供方法1200的第二示例的替选方法1400。在框1201处,确定车辆100的向后移动状况,并且在框1401处,确定车辆的俯仰角是否大于阈值俯仰角。如果不是,则在框1402处确定作为增益值和前轮转向角的乘积的第一建议后轮转向角。可替选地,如果在框1401处确定车辆的俯仰角大于阈值俯仰角,则确定与请求转向角成比例的建议后轮转向角。另外,使车辆100的前轮106通过与请求转向角成比例但小于后轮103的角的角进行转向,使得车辆100主要由后轮103转向。在一个实施方式中,前轮106可以以零度被锁定,并且车辆106仅由后轮103转向。在框1404处,将用于根据建议后轮转向角控制后轮的转向的输出信号例如提供给致动器102。因此,前轮被锁定并且仅使用后轮执行转向。
现在将参照图15至图21描述车辆100的在图4中被标记为低牵引力的第二特殊状况。图15示出了车辆100以相对低的速率向前移动的平面视图。车辆100处于其标准状况并且其前轮106向左转动以使得车辆能够向左转向。后轮103与前轮106异相转向以增强车辆100的操纵性。如上所述,后轮103转动的角是前轮转动的角和增益值的乘积。
图16和图17示出了车辆100在当由于道路轮103、106中的一个或更多个位于地面的凹陷中以及地面提供非常低的摩擦和/或是可变形的而不能向前进行行进时释放车辆的过程期间的平面视图。例如,地面可以由泥、雪或砂形成。当车辆100由于通过车辆100的轮胎仅可获得的非常低的牵引力而进行非常缓慢的行进时,可以执行类似的过程。为了从其被卡住的位置释放车辆和/或使得车辆能够进行行进,车辆100的驾驶员通过致动其加速踏板1601从车辆102的动力系请求扭矩,并且使其方向盘108摆动,以使前轮106在图16中示出的向左取向与图17中示出的向右取向之间摆动。前轮的摆动辅助前轮106获得额外的抓地力和/或减小前轮106所在的凹陷。例如,在泥泞地面上,可以通过轮106的轮胎的侧壁抵靠轮胎所在的车辙的动作来获得额外的抓地力,或者在松散的砂土上,可以通过轮胎将另外的砂土拉入凹陷中的动作来在深度上减小轮106所处的凹陷。
在图16和图17中,控制装置105已经识别出车辆100处于低牵引力状况,并且因此,与在图15中示出的标准状况下使用的增益值相比,使用相对大的增益值来确定后轮103转向的角。在本实施方式中,-1的增益值用于确定后轮103的建议转向角,使得后轮103以与前轮106类似的方式但与前轮106异相转向。因此,后轮103的摆动有助于如下过程:使得车辆100能够以与前轮106的摆动类似的方式向前进行行进。
图18示出了当确定车辆100处于低牵引力状况时的转向角确定装置403和状态检测装置402的操作。状态检测装置402被配置成接收如下内容的指示:车辆100的纵向速度(V
标准中的第一个是确定前轮转向角以高于阈值频率的频率震荡,即前轮以大于阈值频率的频率重复地向左并然后向右转向。在实施方式中,阈值频率是0.5Hz。
第二标准包括来自动力系的请求的扭矩高于阈值扭矩值,或者加速器踏板正在由车辆的驾驶员致动。
如上所述,由车辆状态估计装置401根据地面上车辆的纵向速度(V
因为爬升失败然后可能导致车辆100缺乏向前运动,所以另外的标准可以包括确定车辆100的俯仰角不大于阈值俯仰角。在这种情况下,优先于低牵引力状况确定倒车下行状况,使得后轮103的转向被配置成安全地使车辆100能够沿坡地向下向后转向。
如果满足标准,则状态检测装置402确定低牵引力状况,并且转向角确定装置403根据请求转向角和相对高的负增益值来确定建议后轮转向角。在实施方式中,每当确定低牵引力状况时,转向角确定装置403通过将请求转向角乘以高的负增益值例如-1来计算建议后轮转向角。然而,在本实施方式中,所使用的增益值还根据当前选择的驾驶模式。对于可用于在粗糙的高摩擦力表面例如岩石地面上驾驶的驾驶模式,增益值的大小可以选择为相对低,例如小于0.2,并且也许增益值可以被保持在用于处于车辆的标准状况下的车辆的标准增益值处。对于所有其他驾驶模式,可以使用相对高的增益值,例如-1。
用于使后轮103转向的致动器102可能不能使后轮103以这样大的角度转向:由前轮转向机构使能的角度。然而,已确定建议后轮转向角,转向角确定装置403向致动器102提供输出,以尽可能地使以建议后轮转向角转向。
图19示出了流程图,流程图示出了实施本发明并且可由控制装置105执行以控制车辆100的后轮103转向的方法1900。在方法1900的框1901处,接收指示请求转向角的第一信号,以及在框1902处,根据接收到的信号确定车辆100是否处于低牵引力状况。在框1903处,根据第一信号以及车辆100是否确定为处于低牵引力状况来确定建议后轮转向角,以及在框1904处,例如向致动器102提供输出信号,以使后轮以建议后轮转向角转向。
图20所示的流程图示出了提供方法1900的示例的方法2000。在框2001处,接收指示请求转向角的第一信号。在框2002处,确定车辆100是否处于低牵引力状况,并且如果是,则在框2003处选择第一增益值。替选地,如果确定车辆100未处于低牵引力状况,则在框2004处选择小于第一增益值的第二增益值。如上所述,第一增益值可以是-1或接近于-1(例如,至少-0.5),而作为当确定车辆100处于另一状态例如其标准状况时所选择的增益值,第二增益值相对较小。
无论选择哪个增益值,在框2005处,通过将前轮转向角乘以所选的增益值来确定建议后轮转向角。然后在框2006处,提供输出信号,以使后轮103以建议后轮转向角转向。
图21的流程图中示出了框2002处的确定车辆100是否处于低牵引力状况的过程的示例。在该过程的框2101处,确定来自车辆100的动力系的扭矩是否是所请求的。如果扭矩是所请求的,则在框2102处确定车辆100的测量的横摆率与目标横摆率之间的差是否大于阈值误差值。如果差大于阈值误差值,则在框2103处确定前轮转向角是否以大于阈值频率的频率震荡。如果震荡具有大于阈值频率的频率,则在框2003处确定车辆100处于低牵引力状况,并且选择第一增益值。
如果框2101至2103处的任何确定提供否定结果,则确定车辆100不处于低牵引力状况,并且在框2004处选择第二增益值。
现在将参照图22至图29描述在图4中标记为边坡的车辆100的第三特殊状况。图22示出了在其标准状况下沿向前方向行驶的车辆100的平面图。前轮106以零度的转向角进行定向,并且因此,后轮103也以零度的转向角进行定向。
图23示出了在其边坡状况下沿向前方向行驶的车辆100的平面图。在图23中,车辆100正在沿着边坡2301行驶,其中车辆100的左侧沿边坡2301向上高于车辆100的右侧。图23中的箭头2302指示沿边坡2301向下最陡的方向,并且车辆100沿基本垂直于箭头2302的方向行驶,以沿边坡2301向上保持恒定的高度。
当以这种方式沿着边坡行驶时,存在重力对车辆具有影响的趋势,使得导致常规车辆的前部相比于车辆的后部沿边坡向下更低地滑落,并且车辆被沿边坡向下拉动。为了补偿这种影响,有经验的驾驶员可以沿边坡向上轻微地转向,以便使车辆保持沿着边坡以期望的方向移动。然而,如图23所示,车辆100提供后轮103的转向,使得在驾驶员不必提供转向以补偿边坡2301的影响的情况下,车辆100的方向是如其驾驶员所期望的沿着边坡2301。具体地,使后轮103转向(在该示例中为向右),以引导车辆100的后部2303相比于车辆100的前部2304更低地沿边坡2301向下,同时前轮106保持零转向角。因此,车辆100被定向为使得其纵向轴轻微地沿斜坡向上指向,但是由于重力的影响,车辆100依照期望以恒定的高度沿着边坡2301行驶。
当检测到车辆100正在以大于阈值角的角度而倾斜的边坡2301上行驶时,控制装置105被配置成以这种方式自动地使后轮103转向。后轮103的转向角的大小在前轮106以零度转向的同时取决于边坡2301多陡峭。这也取决于当前所选的驾驶模式是什么。例如,在由砂形成的边坡2301例如砂丘的侧部上,后轮103的转向角可以被布置成相对较大,以补偿边坡2301所具有的当与有高摩擦力表面的固态边坡2301会具有的影响相比时对车辆100相对较大的影响。
如图23所示,当车辆100正在沿着边坡2301行驶时,如果接收到例如由驾驶员使用方向盘108使车辆100沿边坡2301向上或向下转弯的转向输入,则前轮106根据转向输入转向,并且控制装置105使后轮103的转向角减小成比例的量。因此,当前轮转向角是零度时,后轮转向角具有最大角度。随着转向输入使前轮转向角进一步增大,后轮103的转向角进一步成比例地减小,直到当前轮转向角为阈值转向角时后轮转向角为零为止。根据边坡角,阈值转向角可以在大约0度与15度之间。(应注意,该阈值角是前轮的车轮角,而不是方向盘角。)随着前轮转向角增加至高于阈值角,后轮转向角可以保持为零,直到前轮103的转向角达到第二更高阈值角为止,此时控制装置105恢复至标准状况,在标准状况下后轮转向角与前轮转向角成比例。例如,以砂丘上的相对低的速率,后轮103与前轮106异相转向,以为车辆100提供增强的操纵性,这可以使车辆100的驾驶员能够转向离开边坡2301。
图24示出了当确定车辆100处于其边坡状态时的转向角确定装置403和状态检测装置402的操作。状态检测装置402从车辆状态估计装置401接收车辆100的估计的侧倾角(θ
在本实施方式中,状态检测装置402还接收车辆100的纵向速度(V
在本实施方式中,还仅当当前的纵向速度(或速率)低于最大速率阈值并且请求转向角小于最大转向角时,状态检测装置402才确定车辆100处于边坡状况。
当由状态检测装置402确定边坡状况时,根据请求转向角、侧倾角(θ
为此,将接收到的侧倾角(θ
请求转向角乘以校正系数,以确定校正角2402。然后,边坡转向角2401的大小被减小校正角2402,以确定校正的边坡转向角2403。即,无论请求转向角是沿边坡向上还是向下,边坡转向角2401的大小都减小等于校正角2402的量。
当车辆100已沿着边坡行驶超过短的时间段,例如超过2秒时,后轮103可以成功地以校正的边坡转向角2403转向。然而,为了为车辆100提供稳定性并且当车辆100朝向边坡上驾驶时使驾驶员能够容易地保持控制,转向角确定装置403被配置成根据标准状况下的后轮103的转向角以及边坡状况下的后轮103的转向角来提供平稳的过渡。为此,当检测到边坡状况时,通过将请求转向角乘以标准增益值,即如以上参照图5至图9所述的,转向角确定装置403继续计算标准的后轮转向角2404。然后,通过混合(blend)功能2405将校正的边坡转向角2403与标准的后轮转向角2404组合,以产生建议后轮转向角。
在检测到边坡状况的指示之后的初始时段期间,通过将校正的边坡转向角2403的部分添加至标准的后轮转向角2404部分,混合功能2405被配置成产生建议后轮转向角。在该初始时段中,校正的边坡转向角2403的部分随时间从零稳定地增加,同时标准的后轮转向角2404的部分随时间稳定地向下减小至零。在初始时段之后,混合功能2405将建议后轮转向角确定为等于校正的边坡转向角2403。
转向角确定装置403将输出信号提供至致动器102,以使致动器102以建议后轮转向角使后轮103转向。
在例如图2的实施方式中,其中,车辆100具有线控转向前轮106,转向角确定装置403可以被配置成除了控制后轮103转向以外或代替控制后轮103转向,根据车辆100的侧倾角来自动地控制前轮106转向。在该实施方式中,当车辆100沿着边坡以基本上恒定的高度驾驶时,其中车辆100的一侧高于另一侧(即,使得侧倾角不为零),在驾驶员没有提供转向输入的情况下,前轮106自动地转向以使车辆100的前部比车辆100的后部在边坡上升高更高。
图25中示出了用于这样的具有线控转向前轮106的车辆100的转向角确定装置403的操作的示例。当确定车辆100处于其边坡(BANK)状态时,通过将车辆100的侧倾角乘以前轮边坡增益值来确定边坡转向角2501。通过混合功能2502将边坡转向角2501的一部分与请求转向角相加,以产生建议前轮转向角。在检测到边坡(BANK)状况的时刻之后,通过混合功能2502相加的边坡转向角2501的一部分在大约1秒的预定义的时段内从零稳定地增加至一。在该预定义的时段已经过去之后,将整个转向角与请求转向角相加。
应当理解,相加考虑了角度的符号(正或负),使得当负的边坡转向角与正的请求转向角相加时产生建议前轮转向角,该建议前轮转向角具有与请求转向角和边坡转向角的大小不同的大小。
将意识到,响应于边坡(BANK)状况的检测的前轮的这样的自动转向也可以应用于具有线控转向的前轮和不能转向的后轮的车辆。
图26示出了说明实施本发明并且可由控制装置105执行以控制车辆100的后轮103的转向的方法2600的流程图。在方法2600的框2601处,接收指示请求转向角的第一信号,并且在框2602处,接收指示车辆的侧倾角的第二信号。在框2603处,确定是否已经满足一组预定标准,其指示车辆100处于边坡(BANK)状况。如果未满足所有标准,则在框2605处,根据第一信号而不考虑第二信号来确定车辆100的可转向轮的建议转向角。可替选地,如果在框2603处发现满足指示车辆100处于边坡(BANK)状况的所有标准,则在框2604处根据第一信号(指示请求转向角)和第二信号(指示车辆的侧倾角)来确定车辆100的可转向轮的建议转向角。在框2604或框2605处的处理之后,在框2606处提供输出信号,该输出信号被配置成使可转向轮以建议转向角转向。重复执行方法2600,以便在行驶期间控制车辆100的可转向轮。
在图27的流程图中示出方法2600的在框2603处执行的处理。在框2701处,执行框2603的第一处理,其中,确定第二信号是否指示大于阈值侧倾角的侧倾角。如果是,则在框2702处确定侧倾角是否持续高于阈值角达预定义时间段。如果是,则在框2703处确定车辆100的向心力在预定义时间段期间是否持续小于阈值。如果是,则在框2704处确定车辆100的速度(或纵向速率)是否小于阈值速度。如果是,则在框2705处确定请求转向角是否小于阈值转向角。如果是,则在框2603处满足所有标准,即,车辆100被确定为处于边坡状况,并且因此执行在框2604处的处理。
如果在框2701至2705中的任何一个框处确定指示未满足该组标准中的至少一个标准的否定结果,则执行在框2605处的处理。
针对车辆100,在图28的流程图中示出方法2600的在框2605处执行的处理,在车辆100中,后轮103根据车辆100的侧倾角自动转向。在框2801处,执行框2605的第一处理,其中,根据车辆100的当前选择的驾驶模式来确定边坡增益值。在框2802处,通过将边坡增益值乘以车辆100的侧倾角来确定边坡转向角2401。在框2603处,将由接收的第一信号指示的请求转向角乘以转向校正系数以确定校正角。在框2804处,考虑角度的符号,将在框2602处确定的边坡转向角然后与校正角相加以产生校正的边坡转向角。最后,在框2805处,根据校正的边坡转向角在框2805处确定建议后轮转向角。
在图29所示的流程图中示出在框2805处执行的处理。首先在框2805中,在框2901处确定自首次检测到边坡状况即自在框2603处首次满足所有标准以来已经经过了多长时间t。在框2902处,确定自首次确定边坡状况以来经过的时间t是否大于预定义的混合周期t
在框2903处确定了标准后轮转向角之后,在框2904处通过混合函数来确定建议后轮转向角。建议后轮转向角是通过以下处理来计算的:将校正的边坡转向角乘以混合周期t
在框2904或框2905处确定建议后轮转向角之后,执行在框2606处的处理以完成方法2600。
出于本公开内容的目的,应当理解,本文描述的控制装置/控制器可以各自包括具有一个或更多个电子处理器的控制单元或计算装置。车辆和/或其系统可以包括单个控制单元或电子控制器,或者可替选地,控制器的不同功能可以包含在或托管在不同的控制单元或控制器中。可以提供指令集,当其被执行时,使所述控制器或控制单元实现本文描述的控制技术(包括所描述的方法)。该指令集可以嵌入在一个或更多个电子处理器中,或者可替选地,该指令集可以作为要由一个或更多个电子处理器执行的软件来提供。例如,第一控制器可以在一个或更多个电子处理器上运行的软件实现,并且一个或更多个其他控制器也可以在一个或更多个电子处理器(可选地与第一控制器相同的一个或更多个处理器)上运行的软件实现。然而,应当理解,其他布置也是有用的,并且因此,本公开内容不旨在限于任何特定的布置。在任何情况下,以上描述的指令集可以嵌入在计算机可读存储介质(例如,非暂态计算机可读存储介质)中,所述计算机可读存储介质可以包括用于存储机器或电子处理器/计算装置可读的形式的信息的任何机制,包括但不限于:磁存储介质(例如,软盘);光学存储介质(例如,CD-ROM);磁光存储介质;只读存储器(ROM);随机存取存储器(RAM);可擦除可编程存储器(例如,EPROM或EEPROM);闪存;或者用于存储这样的信息/指令的电子介质或其他类型的介质。
如以上关于图3和图4所描述的,第一转向致动器102可操作以提供足以使车辆100的车轮103以较低速度和较高速度转动的扭矩。然而,当静止时,该扭矩可能不足以克服车轮103与从动表面之间的摩擦。
本发明提出的替选解决方案用于根据车辆速度将达到零的确定时间值来使车轮103返回到向前直行的状况。
在这样的场景下,控制系统104可以被配置成实现“归零”功能。如图30a所示,该功能包括两个主要步骤。在确定框501处执行第一步骤,其中,控制系统确定针对转向轮“归零”的要求,并且包括将直到车辆速度将达到0的估计时间即减速时间值T
将减速时间值T
T
监测目标时间值T
T
时间值T
例如,减速时间值T
时间值T
图31a提供了控制系统104的示例,其中,在确定框503处,根据当前车辆速度v和当前车辆加速度a来确定减速时间值T
与零或正加速度结合的正速率将指示车辆正在向前行驶并且没有减速,并且因此将不存在“归零”要求。类似地,与零或负加速度结合的负速率将指示车辆正在倒车行驶并且没有减速。在这两种情况下,将保持关于图4和图5描述的标准控制。
如果速率为正并且加速度为负,或者速率为负并且加速度为正,则指示车辆正在减速,并且减速时间值T
可以代替地在503处通过根据图31b以相应的时间间隔接收多个车辆速率值v
目标时间值T
可替选地,目标时间值T
T
在一些示例中,可以动态地确定致动器时间值T
例如,如果车轮的当前角位移为5°,并且致动器速率的速率为10度每秒,则致动器时间值T
致动器速率ω
在一些示例中,控制系统104被配置成根据接收到的指示各种车辆和环境变量的信号来从存储在存储装置302内的查找表中检索致动器速率ω
致动器速率ω
应当理解,在不脱离本发明的范围的情况下,这些角位移和角速率θ
目标时间值T
T
可调谐时间值T
可以根据各种因素来修改或确定可调谐时间值T
当确定需要“归零”时,控制系统然后提供对车轮103的控制以返回向前直行的状况。向前直行的状况可以定义为车轮103与车辆100的纵轴1001平行+/-预定义公差。
公差可以根据与转向和悬架系统相关联的车辆部件的特性来定义。向前直行的状况可以被定义为0°+/-3.5°。
控制器105向转向致动器102提供控制信号。该控制信号可以超越在正常驾驶中提供的控制,即通过正常使用控制信号。可替选地,控制信号可以在同一控制器105内确定其的位置处被输出。
如以上参照图4和图5所定义的,一旦车辆100被确定为再次运动,则控制系统104可以恢复其正常功能。车辆处于运动的确定可以包括接收车辆速度大于0.2m/s的指示。
可以根据当前选择或确定的驱动模式来修改或禁用“归零”功能。例如,当在岩石爬行场景下驾驶时,并且因此当最有可能在岩石爬行模式下操作时,车辆的运动的特征为处于非常低的速度。地形也可能具有非常高度的表面摩擦,并且车轮103可能具有变化的负载。这些状况最有可能超过致动器102的能力,并且在低速下的变化可能导致车轮103抖动,因为车辆被连续地确定为减速至0,并且然后再次加速。
也可以根据其他确定的驾驶场景禁用“归零”功能。例如,在高速轨道驾驶中,车辆减速度可以非常高,并且因此可以发现减速时间值T
应当理解,在不脱离本申请的范围的情况下,可以对本发明进行各种改变和修改。
图8、图9、图12至图14、图19至图21以及图26至图29中所示的框可以表示计算机程序303中的方法和/或代码段中的步骤。针对框的特定顺序的示出不一定暗指存在针对框的要求的或优选的顺序,并且框的顺序和布置可以改变。此外,可以省略一些步骤。
尽管在前面的段落中已经参照各种示例描述了本发明的实施方式,但是应当理解,在不脱离所要求保护的本发明的范围的情况下,可以对给出的示例进行修改。例如,在可替选的实施方式中,如参照图6至图9所描述的,控制装置105可以被配置成在标准状况下而不在任何特殊状况下或者仅在选定的特殊状况下控制车辆100的后轮103的转向。还应当理解,控制装置105可以被配置成检测除了所描述的那些状况之外的其他特殊状况,并且以针对那些其他特殊状况定制的方式控制后轮转向。
在前述描述中描述的特征可以在除了明确描述的组合之外的组合中使用。
尽管已经参照某些特征描述了功能,但是无论是否已被描述,那些功能可以由其他特征来执行。
尽管已经参照某些实施方式描述了特征,但是无论是否已被描述,那些特征也可以存在于其他实施方式中。
尽管在前面的说明书中尽力引起对本发明的那些被认为是特别重要的特征的注意,但是应当理解,无论是否特别强调,申请人要求保护前面提到的和/或在附图中示出的任何可专利性的特征或特征的组合。