一种船体磁吸附式爬壁机器人
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及一种船体磁吸附式爬壁机器人,属于移动机器人技术领域。
背景技术
我国的船舶制造业在制造领域占有重要的地位,随着海洋运输、深海探测等迅速发展,对船舶制造技术提出了更高的要求,船舶的制造过程主要的加工工序有焊接、除锈、喷涂等操作,由于这些制造过程环境极其恶劣,比如在焊接过程中,工人需要在密闭的空间中承受近60℃的高温,近年来国内外积极推动将爬壁机器人应用于船舶制造过程的焊接、涂装、除锈的制造领域。
通常地,现有爬壁机器人的攀爬多采用以下几种方式:磁吸附的方式多应用在攀爬的壁面是导磁体的场景,磁吸附有电磁体吸附和永磁体吸附两种;负压吸附是利用机器人和被吸附的壁面之间形成负压,产生吸附力而实现吸附;干性材料静电吸附方式,干性黏附材料是模拟壁虎脚掌,通过微机电系统加工技术设计并制作的高分子材料吸附阵列,该
吸附方式最大的优点就是对吸附面的形状和材质没有特殊要求,适应性较强。爬壁机器人移动部分常用的结构有足式、轮式、履带式和混合式等。
现有的专利公开了一种爬壁机器人,公开号:CN110816770A,包括:支撑架;两个主动轮组件,间隔连接在所述支撑架的一侧;两个从动轮组件,间隔连接在所述支撑架的另一侧,与所述主动轮组件共同作用,支撑所述支撑架移动位置;至少一个吸附件,连接在所述支撑架上,并且设置在所述主动轮组件和所述从动轮组件之间,能够产生磁吸附;以及清洗件,连接在所述支撑架上,并且设置在所述主动轮组件和所述从动轮组件之间。该装置虽然有降低了人工的劳动强度,提高了除锈效率,安全性相对较高的优点,但是有要求壁面必须平坦、避障能力差、非接触式磁吸附不稳定的缺点。
发明内容
本发明的目的是针对现有的爬壁机器人的攀爬吸附结构一般有着结构复杂、设备笨重、控制困难等缺点;移动机构一般有着移动方式单一、要求移动表面平整、转弯困难等缺点。提供一种船体磁吸附式爬壁机器人,具有结构设计巧妙、实用简单、可任意角度移动、移动方式多样的优点。
本发明的目的是这样实现的:包括行走装置、电控装置、转向装置、伸缩臂装置和吸盘手装置,电控装置设置在行走装置的上方,转向装置有两个且对称设置在行走装置的两侧,伸缩臂装置和吸盘手装置也有两个,每个伸缩臂装置的一端连接在转向装置上、另一端与吸盘手装置连接。
本发明还包括这样一些结构特征:
1.每个所述吸盘手装置包括上方平台、设置在上方平台上的直流电机、设置在直流电机输出端上的凸轮、通过支柱设置在上方平台下方的下方平台、滑动导杆机构、吸盘机构,所述滑动导杆机构包括与滑轮、导杆和弹簧,滑轮与凸轮接触,滑轮的中心孔穿过导杆上部并可自由转动,所述导杆下部穿过下方平台圆形槽孔且通过弹簧与下方平台可动连接,所述弹簧上端与导杆下部的限位部分接触、弹簧的下端与下方平台圆形槽孔底部接触,所述吸盘机构包括与导杆下端部连接的吸盘台、设置在吸盘台下端中间位置的小磁铁、对称设置在吸盘台下端的三个仿鲍鱼短波纹吸盘。
2.仿鲍鱼短波纹吸盘设置有三个不同的纹理区域,即外侧多唇边区域、中部大花纹区域、内侧密集小花纹区域。
3.所述行走装置包括三角底板、对称设置在三角底板下端的三个轮座、设置在每个轮座中的滚珠、设置在三角底板下端中间位置的磁钢。
4.所述电控装置包括通过支柱设置在三角底板上方的上三角板、设置在上三角板上方的电源、设置在上三角板下方的控制板。
5.每个所述转向装置包括通过轴承设置在三角底板上的短轴、设置在三角底板上端且与短轴一端固连的肩部、设置在短轴另一端上的锥齿轮一、设置在三角底板下端面的伺服电机、安装在伺服电机输出轴上的锥齿轮二,锥齿轮一和锥齿轮二啮合。
6.每个所述伸缩臂包括与肩部固连的电动撑杆、设置在电动撑杆输出端的固定座,固定座安装在对应的吸盘手装置的上平台上。
与现有技术相比,本发明的有益效果是:本发明所设计船体磁吸附式爬壁机器人结构设计巧妙,简单实用,通过磁力吸附和吸盘吸附相结合,其中吸盘为仿鲍鱼短波纹吸盘具有吸附力强的优势,因此本发明有负载大、体积小的优点。通过多个机构的合理组合配合运行,可以有效地使该船体磁吸附式爬壁机器人实现任意角度自由直线行走、转弯、悬停,相比目前市面上的船体磁吸附式爬壁机器人,本发明船体磁吸附式爬壁机器人成本低、运行稳定可靠、无需引线外接电源,便于维护保养,能够实现在船体表面不平整、船体表面有障碍、船体表面坡度大等多种复杂场合内的运行作业,其作用明显、效果显著,具有良好的经济价值和市场效益。
附图说明
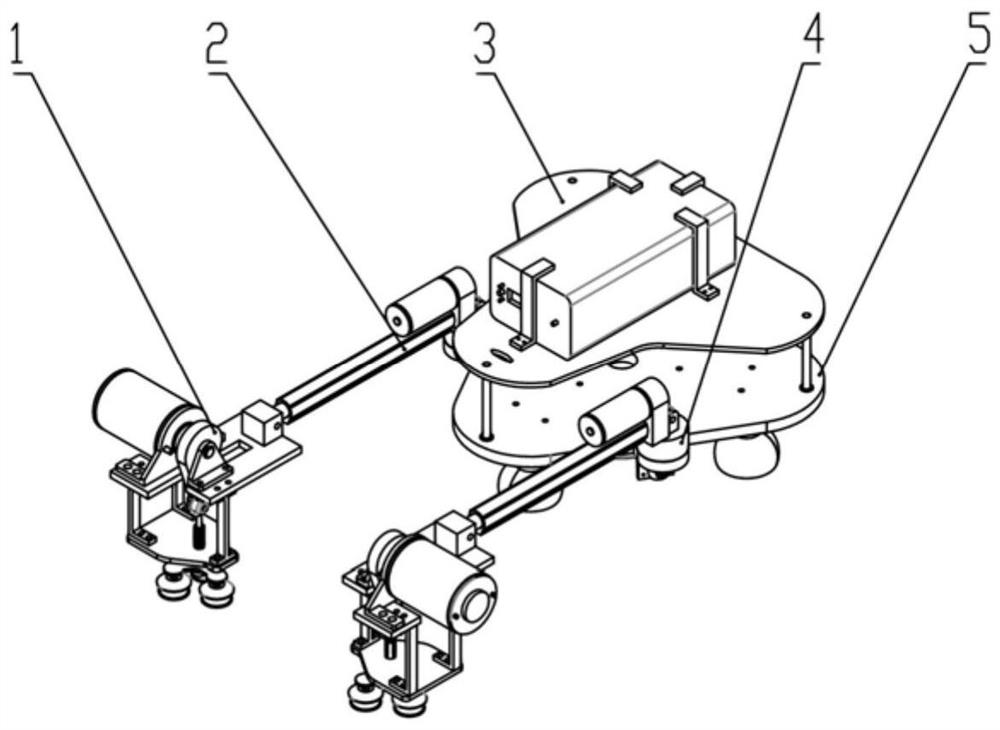
图1为本发明爬壁机器人的结构示意图。
图2为本发明吸盘手结构示意图。
图3为本发明伸缩臂结构示意图。
图4为本发明电控结构示意图。
图5为本发明转动关节结构示意图。
图6为本发明行走结构示意图。
图7为本发明仿鲍鱼短波纹吸盘示意图。
图8为本发明行鲍鱼短波纹吸盘剖视图A-A。
图9为本发明吸盘手上抬运动示意图。
图10为本发明爬壁机器人运动方式一原理图。
图11为本发明爬壁机器人运动方式二原理图。
其中:1、吸盘手装置;2、伸缩臂装置;3、电控装置;4、转向装置;5、行走装置;1-1、仿鲍鱼短波纹吸盘;1-2、小磁铁;1-3、吸盘台;1-4、下方平台;1-5、U型支柱;1-6、工字支柱;1-7、弹簧;1-8、导杆;1-9、滑轮;1-10、直流电机;1-11、电机座一;1-12、凸轮;1-13、电机座二;1-14上方平台;2-1、固定座;2-2电动撑杆;3-1、支柱;3-2、控制板;3-3、上三角板;3-4电源;3-5、限位夹;4-1、肩部;4-2、短轴;4-3、轴承一;4-4、轴承二;4-5、锥齿轮一;4-6锥齿轮二;4-7、挡板;4-8伺服电机;5-1、滚珠;5-2、轮座左;5-3、轮座右;5-4、托槽;5-5、磁钢;5-6、三角底板。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述。
本发明的一种船体磁吸附式爬壁机器人包括:手部系统和移动系统,所述两个手部系统固定连接在移动系统的两侧。
所述的手部系统包括吸盘手装置、伸缩臂装置和转向装置,吸盘手装置的尾部与伸缩臂装置的前端固定连接,伸缩臂装置的尾端与转向装置的上端固定连接,转向装置的步进电机与行走装置的底盘固定连接。
所述的吸盘手装置包括机架、凸轮机构、滑动导杆机构和吸盘机构,机架与凸轮机构固定连接,凸轮机构与滑动导杆机构转动接触,滑动导杆机构与吸盘机构固定连接。通过吸盘与接触面吸附和分离的状态切换,具有悬停和运动功能,悬停时的吸附力由吸盘的负压吸力和永磁体的磁力共同提供,直流电机驱动凸轮连杆机构中凸轮的转动实现吸盘的上下运动。所述的伸缩臂装置具有伸缩和伸缩长度可控的功能,可以使与伸缩臂装置相连接的吸盘手装置或转向装置的位置发生变化。所述的转向装置中步进电机的转动通过一对啮合的锥齿轮机构传递给伸缩臂装置,使伸缩臂装置可以在150度的范围角度内转动。
所述的移动系统包括电控装置和行走装置,所述的电控装置的下端与行走装置的底盘固定连接。所述的行走装置是一种船体磁吸附式爬壁机器人的主体,具有吸附、全方向移动、支撑的功能,由行走装置中的永磁体提供吸附力,由行走装置中的万向球实现机构的全方向移动,行走装置为转向装置和电控装置提供支撑作用。所述的电控装置具有供能和控制功能,电控装置中的电源为其他装置的驱动元件提供动力,电控装置中控制板实现吸盘手装置中吸盘的升降、伸缩臂装置伸缩的距离、转向装置旋转角度变化的控制功能。
优选的,所述机架包括一个上方平台、一个下方平台、两个U型支柱和一个工字支柱,所述上方平台与U型支柱和工字支柱的上端通过螺栓连接,所述下方平台与U型支柱U型支柱和工字支柱的下端通过螺栓连接组成分层架构。此设计的好处是螺栓连接便于安装于拆卸,分层架构可以为凸轮机构的运动提供足够的空间。
优选的,所述凸轮机构包括直流电机、电机座一、电机座二和凸轮,所述电机座一和电机座二通过螺栓固定安装在上方平台上部的左右两侧,所述直流电机通过螺栓固定安装在电机座一的上部外侧,所述凸轮中心孔穿过电机的传送轴通过螺钉固定的。此设计的好处在于直流电机可以带动连接的凸轮同步转动。
优选的,所述滑动导杆机构包括滑轮、导杆和弹簧,所述滑轮中心孔穿过导杆上部可自由转动,所述导杆下部穿过下方平台圆形槽孔通过弹簧与下方平台可动连接,所述弹簧上端穿过导杆下部与导杆下部的限位部分接触,弹簧的下端与下方平台圆形槽孔底部接触。此设计的好处是当凸轮转动向下运动时压缩弹簧使滑动导杆机构向下运动,当凸轮转动向上运动时弹簧释放弹力使滑动导杆机构向上运动,滑轮与凸轮滚动接触可以减少零部件的摩擦损耗。
优选的,所述吸盘机构包括一个吸盘台、一个小磁铁和三个仿鲍鱼短波纹吸盘,所述吸盘台的中心螺纹孔与导杆下部螺杆固定连接,所述小磁铁位于吸盘台下端的圆形槽内通过过盈配合连接,所述仿鲍鱼短波纹吸盘位于吸盘台下端的间隔板中通过螺栓固定。此设计的好处是当吸盘机构向下运动仿鲍鱼短波纹吸盘与接触面接触形变产生负压吸力可以使所述吸盘机构牢牢的固定在接触面,为机构下一步的运动提供支撑作用,所述仿鲍鱼短波纹吸盘的设计模仿鲍鱼的多区域不同纹理的生理特性所设计具有三个不同的纹理区域,即外侧多唇边区域1-1a、中部大花纹区域1-1b、内侧密集小花纹区域1-1c,三层纹理的设计与主体的短波纹结构大大提高了吸盘的吸附力,所述吸盘机构中安装的小磁铁可以提供磁力使吸盘机构与接触面的吸附更加牢固并帮助提高仿鲍鱼短波纹吸盘的吸附力。
优选的,所述伸缩臂装置包括固定座和电动撑杆,所述固定座的下部与吸盘手装置的上方平台固定连接,所述固定座的圆孔凹槽穿过电动撑杆的前端通过螺栓固定连接,所述电动撑杆的尾端位于转向装置的肩部上夹板中通过螺栓固定连接。
优选的,所述转向装置包括一个肩部、一个短轴、两个轴承、两个锥齿轮、一个挡板和一个伺服电机,所述肩部下端与短轴通过螺纹固定连接,所述短轴通过的两个轴承固定在行走装置的三角底板上,所述的两个相互啮合的锥齿轮,其中一个锥齿轮为主动锥齿轮,另一个锥齿轮为从动锥齿轮,所述的从动锥齿轮与短轴传动连接,所述伺服电机的输出轴与主动摆动锥齿轮传动连接,所述伺服电机与挡板螺栓固定连接,所述挡板焊接到三角底板下部。此设计的好处是通过伺服电机的转动实现手部系统相对移动系统在水平150度的范围角度内转动,配合其他机构的运动达到可任意角度移动的目的。
优选的,所述电控装置包括一个上三角板、四个限位夹、三个支柱、一个电源和一个控制板,所述四个限位夹与上三角板上面通过螺栓固定,所述电源被四个限位夹与上三角板形成的空间固定,所述控制板位于上三角板下面的凹槽中通过螺栓固定,所述三个支柱上段与上三角板通过螺纹固定。
优选的,所述行走装置包括一个三角底板、三个轮座左、三个轮座右、三个滚珠、一个托槽和一个磁钢,所述三角底板与电控装置的支柱下部通过螺纹固定,所述轮座左和轮座右通过卡扣连接组成轮座,所述轮座上端与三角底板底面通过螺栓固定,所述滚珠位于被轮座下端球型空间限位固定可自由滚动,所述托槽与三角底板下端通过螺栓固定,所述磁钢位于托槽中限位固定。此设计的好处是磁钢可以提供磁力使行走装置吸附在船体的表面上,滚珠作为移动轮可以使爬壁机器人在任意方向移动。
一种船体磁吸附式爬壁机器人的工作方式,包括以下步骤:
当磁吸附式爬壁机器人吸附在船体表面,两个仿鲍鱼短波纹吸盘吸附固定,通过两个电动撑杆伸长支撑移动系统直线移动到预期位置后,保持其中一个手部系统的吸盘保持固定不动,通过凸轮转动抬起另一个手部系统的吸盘,然后收缩这个吸盘连接的电动撑杆,再通过凸轮转动下降吸盘使这个手部系统固定,同样运动操作使前一个手部系统也完成收缩固定;当两个手部系统都收缩固定后,便可开始下一次的移动系统的直线移动运动。
当磁吸附式爬壁机器人吸附在船体表面需要改变行进方向时,先保持其中一个手部系统的吸盘保持固定不动,凸轮转动抬起另一个手部系统的吸盘通过转向装置中步进电机的转动使这个手部系统在150度的范围角度内转动到需要的角度,然后收缩这个吸盘连接的电动撑杆,再通过凸轮转动下降吸盘使这个手部系统固定,同样运动操作调节前一个手部系统的旋转角度后收缩固定。当调节完两个手部系统固定后便可开始下一次的移动系统的直线移动运动。
实施例1:
如图1至图11所示,本实施例提供一种船体磁吸附式爬壁机器人,该船体磁吸附式爬壁机器人包括两个吸盘手装置1,两个伸缩臂装置2,一个电控装置3,两个转向装置4和一个行走装置5。
吸盘手装置1的尾部与伸缩臂装置2的前端固定连接,伸缩臂装置2的尾端与转向装置3的上端固定连接,转向装置4的步进电机与行走装置5的底盘固定连接,电控装置3的下端与行走装置5的底盘固定连接。
其中,吸盘手装置1包括机架、凸轮机构、滑动导杆机构和吸盘机构,机架与凸轮机构固定连接,凸轮机构与滑动导杆机构转动接触,滑动导杆机构与吸盘机构固定连接,机架由一个上方平台1-14、一个下方平台1-4、两个U型支柱1-5和一个工字支柱1-6组成,上方平台1-14和下方平台1-4分别与U型支柱1-5和工字支柱1-6的上、下两端通过螺栓连接组成分层架构。凸轮机构包括直流电机1-10、电机座一1-11、电机座二1-13和凸轮1-12,电机座一1-11和电机座二1-13通过螺栓固定安装在上方平台1-14上部的左右两侧,直流电机1-10通过螺栓固定安装在电机座一1-11的上部外侧,凸轮1-12中心孔穿过直流电机1-10的传送轴通过螺钉固定的。滑动导杆机构包括滑轮1-9、导杆1-8和弹簧1-7,滑轮1-9中心孔穿过导杆1-8上部可自由转动,导杆1-8下部穿过下方平台1-4圆形槽孔通过弹簧1-7与下方平台1-4可动连接,弹簧1-7上端穿过导杆1-8下部的限位部分接触,弹簧1-7的下端与下方平台1-4圆形槽孔底部接触。吸盘机构包括一个吸盘台1-3、一个小磁铁1-2和三个仿鲍鱼短波纹吸盘1-1,吸盘台1-3的中心螺纹孔与导杆1-8下部螺杆固定连接,小磁铁1-2位于吸盘台1-2下端的圆形槽内通过过盈配合连接,仿鲍鱼短波纹吸盘1-1位于吸盘台1-2下端的间隔板中通过螺栓固定。吸盘手装置1通过吸盘与接触面吸附和分离的状态切换实现船体磁吸附式爬壁机器人悬停和运动功能。
其中,伸缩臂装置2包括固定座2-1和电动撑杆2-2,固定座2-1的下部与吸盘手装置1的上方平台1-14固定连接,固定座2-1的圆孔凹槽穿过电动撑杆2-2的前端通过螺栓固定连接,电动撑杆2-2的尾端位于转向装置4的肩部4-1上夹板中通过螺栓固定连接。伸缩臂装置2可以控制吸盘手装置1的直线移动。
其中,电控装置3包括一个上三角板3-3、四个限位夹3-5、三个支柱3-1、一个电源3-4和一个控制板3-2,四个限位夹3-5与上三角板3-1上面通过螺栓固定,电源3-4被固定安装到形成的限位空间,控制板位3-2于上三角板3-1下面的凹槽中通过螺栓固定,上三角板3-1通过三个支柱3-1上段螺纹固定。电控装置3可以对吸盘手装置1和转向装置4进行控制,实现船体磁吸附式爬壁机器人的运动。
其中,转向装置4包括肩部4-1、短轴4-2、轴承一4-3、轴承二4-4、锥齿轮一4-5、锥齿轮二4-6、挡板4-7和伺服电机4-8,肩部4-1下端与短轴4-2通过螺纹固定连接,短轴4-2通过的轴承一4-3与轴承二4-4固定在行走装置5的三角底板5-6上,两个相互啮合的锥齿轮一4-5和锥齿轮二4-6,其中一个锥齿轮为锥齿轮一4-5,另一个锥齿轮二4-6为从动锥齿轮,从动锥齿轮与短轴4-2传动连接,伺服电机4-8的输出轴与主动摆动锥齿轮传动连接,伺服电机4-8与挡板4-7螺栓固定连接,挡板4-7焊接到三角底板5-6下部。转向装置4中伺服电机4-8的转动可以使伸缩臂装置2可以在150度的范围角度内转动。
其中,行走装置5包括一个三角底板5-6、三个轮座左5-6、三个轮座右5-3、三个滚珠5-1、一个托槽5-4和一个磁钢5-5,三角底板5-6与电控装置3的支柱3-1下部通过螺纹固定,轮座左5-6和轮座右5-3通过卡扣连接组成轮座,轮座上端与三角底板5-6底面通过螺栓固定,滚珠5-1位于被轮座下端球型空间限位固定可自由滚动,托槽5-4与三角底板5-6下端通过螺栓固定,磁钢5-5位于托槽5-4中限位固定。行走装置5在伸缩臂装置2和吸盘手装置1的配合下可以实现在船体表面全角度直线行进。
实施例2:
船体磁吸附式爬壁机器人,结构如实施例1所述,其不同之处在于平行手臂方式移动:
转向装置4中伺服电机4-8的转动使两个伸缩臂装置2成平行状态,然后两个伸缩臂装置2收缩至最短收缩状态,通过凸轮1-12转动使两个仿鲍鱼短波纹吸盘1-1下降人吸附在船体表面固定。此步骤为运动初始状态。
通过两个电动撑杆2伸长支撑移动系统直线移动到预期位置,此步骤为运动状态。
保持其中一个吸盘手装置1的吸盘保持固定不动,通过凸轮1-12转动抬起另一个吸盘手装置1的吸盘,然后收缩这个吸盘连接的电动撑杆2-2,控制转向装置4中伺服电机4-8的转动调节伸缩臂装置2的行进方向,再通过凸轮1-12转动下降吸盘使这个吸盘手装置1固定,重复上述方式使前一个吸盘手装置1也完成收缩固定,此步骤为转向状态。
在初始状态开始后不断重复后两个步骤实现船体磁吸附式爬壁机器人的平行手臂方式直线移动。
实施例3:船体磁吸附式爬壁机器人,结构如实施例1所述,其不同之处在于两手臂方式成一字型方式移动:
(1)转向装置4中伺服电机4-8的转动使两个伸缩臂装置2成一字型状态,然后前面的伸缩臂装置2伸长至最长的伸长状态,后面伸缩臂装置2收缩至最短的收缩状态,通过凸轮1-12转动使两个仿鲍鱼短波纹吸盘1-1下降人吸附在船体表面固定。此步骤为运动初始状态。
(2)通过前面伸长状态的伸缩臂装置2收缩手臂拉动行走装置,后面收缩状态的伸缩臂装置2伸长手臂推动行走装置,直线移动到预期位置,此步骤为运动状态。
(3)保持后面吸盘手装置1的吸盘保持固定不动,通过凸轮1-12转动抬起前面吸盘手装置1的吸盘,控制转向装置中伺服电机4-8的转动调节伸缩臂装置的行进方向,然后伸长这个吸盘连接的电动撑杆2-2至伸长状态,再通过凸1-12轮转动下降吸盘使这个吸盘手装置1固定,重复上述方式使后面吸盘手装置至收缩收缩状态固定,此步骤为恢复转向状态。
在初始状态开始后不断重复后两个步骤实现船体磁吸附式爬壁机器人的平行手臂方式移动。
综上,本发明设计的是一种船体磁吸附式爬壁机器人,设计目的是在船体表面全位移自由行进的爬壁机器人,它的结构包括:吸盘手装置,即机架、凸轮机构、滑动导杆机构和吸盘机构;伸缩臂装置,即固定座和电动撑杆;转向装置,即肩部、短轴、轴承、锥齿轮、挡板和伺服电机;电控装置,即上三角板、限位夹、支柱、电源和控制板;行走装置,即三角底板、轮座左、轮座右、滚珠、托槽和磁钢。上述的各个部分通过紧密的配合,构成了船体磁吸附式爬壁机器人。本发明所设计船体磁吸附式爬壁机器人结构设计巧妙,简单实用,通过磁力吸附和吸盘吸附相结合,其中吸盘为仿鲍鱼短波纹吸盘具有吸附力强的优势,因此本发明有负载大、体积小的优点。通过多个机构的合理组合配合运行,可以有效地使该船体磁吸附式爬壁机器人实现任意角度自由直线行走、转弯、悬停,相比目前市面上的船体磁吸附式爬壁机器人,本发明船体磁吸附式爬壁机器人成本低、运行稳定可靠、无需引线外接电源,便于维护保养,能够实现在船体表面不平整、船体表面有障碍、船体表面坡度大等多种复杂场合内的运行作业,其作用明显、效果显著,具有良好的经济价值和市场效益。
- 一种磁吸附式爬壁机器人底盘及磁吸附式爬壁机器人
- 一种船体磁吸附式爬壁机器人