一种自动封罐机
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及金属盖容器封口设备技术领域,尤其涉及一种自动封罐机。
背景技术
目前常见的桌面式易拉罐封口机的工作方式都大同小异,都是将铝杯盖置于塑料杯杯口,然后通过旋压轮对铝杯盖的挤压来使铝杯盖与塑料杯变形,从而达到密封的目的。但是现有的封口机封口过程中瓶身存在转动,导致容器内物品溢出、位置跑动等技术问题。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种自动封罐机。
为了实现上述目的,本发明采用了如下技术方案:
一种自动封罐机,包括机身、布置于机身上部的封口组件,布置于机身下部的容器放置组件,布置于机身下部的升降驱动组件,所述封口组件连接于联动驱动组件;封口组件上设置有金属盖的定位机构,所述定位机构通过连接件固定于机身上,所述定位机构圆周方向设有卷边辊轮机构、压边辊轮机构,所述联动驱动组件将封口组件及升降驱动组件按设定速比进行联动控制;机身上设置有动力驱动装置,所述动力驱动装置通过驱动联动驱动组件,推动升降驱动组件,使得待封口容器罐身与金属盖紧密贴合,并固定于在所述定位机构和所述容器放置组件之间,所述联动驱动组件带动封口组件动作使得所述卷边辊轮机构、所述压边辊轮机构绕待封口容器进行公转,进行金属盖封口动作。
优选的,所述容器放置组件设置有的固定导向座,活动导向轴,所述活动导向轴上设有距离调整轴、容器定位器、升降连杆,所述固定导向座固定于机身下部与所述封口组件的中心轴保持在同一轴心线上,所述距离调整轴用于调整容器与金属盖压盖间距,保证定位后待封口容器在封口时不发生旋转,所述升降连杆与升降驱动组件活动连接,所述固定导向座上装有活动导向轴,活动导向轴在升降驱动组件作用下实现沿固定导向座轴心方向伸缩。
优选的,所述定位机构包括固定轴,所述固定轴下端固定有压头,所述固定轴的上端通过连接件固定于机身上。
优选的,所述封口组件设有公转底座,所述公转底座固定在所述机身上,所述公转底座内设有辊轮驱动公转轴,所述辊轮驱动公转轴内设有辊轮公转轴,所述辊轮公转轴内设有所述固定轴,所述卷边辊轮机构、压边辊轮机构分别转动连接在辊轮连接臂的两端,复位弹簧的两端分别连接所述卷边辊轮机构或压边辊轮机构与辊轮连接臂;所述卷边辊轮机构包括卷边辊轮、第一辊轮摆臂、第一驱动臂、第一轴承,所述卷边辊轮设于所述压头的圆周,所述卷边辊轮固定在所述第一辊轮摆臂的一端,所述第一辊轮摆臂的另一端与所述第一驱动臂的轴心连接,形成固定角度体,所述第一驱动臂的轴心穿过所述辊轮连接臂的一端,所述第一轴承固定在所述第一驱动臂相对于所述轴心的另一端;所述压边辊轮机构包括压边辊轮、第二辊轮摆臂、第二驱动臂、第二轴承,所述压边辊轮设于所述压头的圆周,所述压边辊轮固定在所述第二辊轮摆臂的一端,所述第二辊轮摆臂的另一端与所述第二驱动臂的轴心连接,形成固定角度体,所述第二驱动臂的轴心穿过所述辊轮连接臂的另一端,所述第二轴承固定在所述第二驱动臂相对于所述轴心的另一端;所述辊轮驱动公转轴外缘上设有第一凸轮段(261)和第二凸轮段(262),旋转过程中,所述第一轴承滚动越过第一凸轮段,所述第二轴承滚动越过第二凸轮段。
优选的,所述联动驱动组件包括固定架、联动轴、第一齿轮、第二齿轮、第三齿轮、第四齿轮、联动减速齿轮组,联动轴上设有第五齿轮,所述第五齿轮与所述联动轴为一体结构或分体结构,所述第三齿轮、第四齿轮固定在所述联动轴上,所述第五齿轮与所述联动减速齿轮组连接,所述第三齿轮与第一齿轮匹配,第四齿轮与第二齿轮匹配,第一齿轮与所述辊轮公转轴连接,所述第二齿轮与所述辊轮驱动公转轴连接。
优选的,所述联动轴旋转的圈数N等于联动减速齿轮组的速比,所述联动轴旋转N圈后,所述第一齿轮与第二齿轮旋转圈数差1,其中,N为正整数,且12≤N≤25。
优选的,所述第一齿轮旋转圈数比第二齿轮旋转圈数小1圈,N为15。
优选的,所述升降驱动组件包括动力连接杆、旋转凸轮、活动杠杆、滚动件;所述动力连接杆的一端与所述联动减速齿轮组输出轴相连,所述动力连接杆的另一端固定有所述旋转凸轮,所述旋转凸轮设有凸轮高点及凸轮低点,所述联动减速齿轮组驱动动力连接杆带动旋转凸轮,所述滚动件轴心固定于所述活动杠杆一端,所述滚动件外缘轮廓接触于所述旋转凸轮端面边缘,随所述旋转凸轮转动而绕所述杠杆固定轴摆动,所述活动杠杆另一端连接升降连杆,推动活动导向轴伸缩。
优选的,所述动力驱动装置设有驱动电机、皮带轮组、皮带,所述驱动电机的输出轴通过所述皮带带动所述皮带轮组转动,所述皮带轮组连接所述联动轴。
优选的,所述机身上设有单循环控制开关,所述动力连接杆上布置有单循环偏心轮,所述单循环偏心轮随动力连接杆旋转,当所述单循环偏心轮上的高点触碰或感应所述单循环控制开关,控制一次圆周循环。
本发明的封口动作分为两次进行,一次预压,二次压紧,保证盖子与瓶口扣合效果更优;并且在封口的过程中容器位置保持不旋转,使得容器内物体进行封口时,不随辊轮旋转,保持禁止,保证物品位置跑动。
附图说明
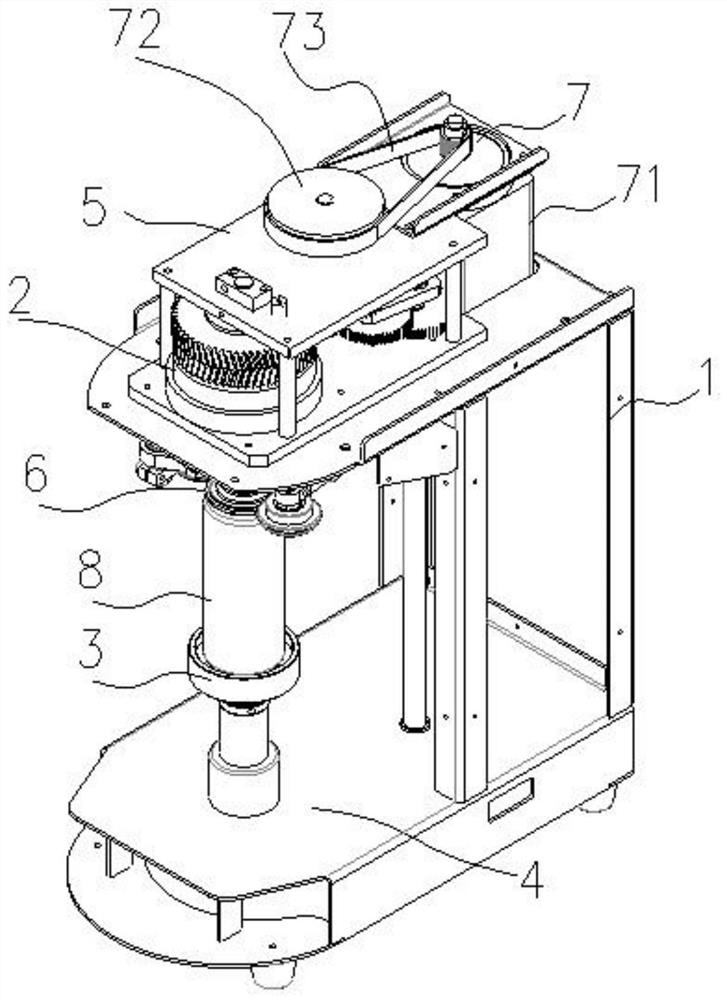
图1为本发明提出的一种自动封罐机的立体图;
图2为容器放置组件及升降驱动组件的示意图;
图3为封口组件的剖视图;
图4为封口组件的立体图;
图5为联动驱动组件的立体图;
图6为辊轮驱动公转轴的立体图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1,本实施例提出了一种自动封罐机,包括机身1、布置于机身1上部的封口组件2,布置于机身1下部的容器放置组件3,布置于机身1下部的升降驱动组件4,封口组件2连接于联动驱动组件5;封口组件2上设置有金属盖6的定位机构,定位机构通过连接件28固定于机身1上,定位机构圆周方向设有卷边辊轮机构、压边辊轮机构,联动驱动组件5将封口组件2及升降驱动组件4按设定速比进行联动控制;机身1上设置有动力驱动装置7,动力驱动装置通过驱动联动驱动组件5,推动升降驱动组件4,使得待封口容器8罐身与金属盖6紧密贴合,并固定于在定位机构21和容器放置组件3之间,联动驱动组件5带动封口组件动作使得卷边辊轮机构、压边辊轮机构绕待封口容器8进行公转,进行金属盖6封口动作。
如图2所示,容器放置组件3设置有的固定导向座31,活动导向轴32,活动导向轴32上设有距离调整轴321、容器定位器322、升降连杆323,固定导向座31固定于机身1下部与封口组件2的中心轴保持在同一轴心线上,距离调整轴321用于调整容器与金属盖压盖22间距,保证定位后待封口容器在封口时不发生旋转,升降连杆323与升降驱动组件4活动连接,固定导向座31上装有活动导向轴32,活动导向轴32在升降驱动组件4作用下实现沿固定导向座31轴心方向伸缩。
如图3所示,定位机构包括固定轴211,固定轴211下端固定有压头212,固定轴211的上端通过连接件28固定于机身1上。
如图3、4、6所示,封口组件2设有公转底座24,公转底座24固定在机身1上,公转底座24内设有辊轮驱动公转轴26,辊轮驱动公转轴26内设有辊轮公转轴25,辊轮公转轴25内设有固定轴211,卷边辊轮机构、压边辊轮机构分别转动连接在辊轮连接臂23的两端,复位弹簧27的两端分别连接卷边辊轮机构或压边辊轮机构与辊轮连接臂23;卷边辊轮机构包括卷边辊轮221、第一辊轮摆臂222、第一驱动臂223、第一轴承224,卷边辊轮221设于压头212的圆周,卷边辊轮221固定在第一辊轮摆臂222的一端,第一辊轮摆臂222的另一端与第一驱动臂223的轴心连接,形成固定角度体,第一驱动臂223的轴心穿过辊轮连接臂23的一端,第一轴承224固定在第一驱动臂223相对于轴心的另一端;压边辊轮机构23包括压边辊轮231、第二辊轮摆臂232、第二驱动臂233、第二轴承234,压边辊轮231设于压头212的圆周,压边辊231固定在第二辊轮摆臂232的一端,第二辊轮摆臂232的另一端与第二驱动臂233的轴心连接,形成固定角度体,第二驱动臂233的轴心穿过辊轮连接臂23的另一端,第二轴承234固定在第二驱动臂233相对于轴心的另一端;辊轮驱动公转轴26外缘上设有第一凸轮段261和第二凸轮段262,旋转过程中,第一轴承224滚动越过第一凸轮段261,第二轴承234滚动越过第二凸轮段262。
如图5所示,联动驱动组件5包括固定架51、联动轴52、第一齿轮53、第二齿轮54、第三齿轮55、第四齿轮56、联动减速齿轮组57,联动轴52上设有第五齿轮58,第五齿轮58与联动轴52为一体结构或分体结构,第三齿轮55、第四齿轮56固定在联动轴52上,第五齿轮58与联动减速齿轮组57连接,第三齿轮55与第一齿轮53匹配,第四齿轮56与第二齿轮54匹配,第一齿轮53与辊轮公转轴25连接,第二齿轮54与辊轮驱动公转轴26连接。其中,联动轴52旋转的圈数N等于联动减速齿轮组55的速比,且联动轴52旋转N圈后,第一齿轮(53)与第二齿轮(54)旋转圈数差1,N为正整数,且12≤N≤25。
而当第一齿轮53外径大于第二齿轮54的外径时,即第一齿轮53旋转圈数比第二齿轮54旋转圈数小1圈时,相同行程可降低第一齿轮的转速,进而起到降低整个自动封罐机抖动的作用,N优选为15。
如图5所示,升降驱动组件4包括动力连接杆41、旋转凸轮42、活动杠杆43、滚动件44;动力连接杆41的一端与联动减速齿轮组57输出轴相连,动力连接杆41的另一端固定有旋转凸轮42,旋转凸轮42设有凸轮高点及凸轮低点,联动减速齿轮组57驱动动力连接杆41带动旋转凸轮42,滚动件44轴心固定于活动杠杆43一端,滚动件44外缘轮廓接触于旋转凸轮42端面边缘,随旋转凸轮42转动而绕杠杆固定轴45摆动,活动杠杆43另一端连接升降连杆323,推动活动导向轴32伸缩。
如图1所示,动力驱动装置设有驱动电机71、皮带轮组72、皮带73,驱动电机71的输出轴通过皮带73带动皮带轮组72转动,皮带轮组72连接联动轴52。
如图2所示,机身1上设有单循环控制开关9,动力连接杆41上布置有单循环偏心轮7,单循环偏心轮7随动力连接杆41旋转,当单循环偏心轮7上的高点触碰或感应单循环控制开关9,控制一次圆周循环。
本发明的工作过程和有益效果如下:首先将金属盖6安放于待封口容器8上,之后将待封口容器8放置于容器定位器322上,通过升降驱动组件4控制待封口容器8与容器定位器322一同上升,使压头212紧密下压金属盖6,距离调整轴321调整容器定位器322与压头212的间距,保证定位后待封口容器8在封口时不发生旋转。
启动驱动电机71,带动联动轴52转动,联动轴52通过第三齿轮55、第四齿轮56分别带动第一齿轮53和第二齿轮54转动,再带动辊轮驱动公转轴26和辊轮公转轴25绕固定轴211公转,由于第一齿轮53旋转圈数比第二齿轮54旋转圈数小1圈,会分别使第一轴承224滚动越过第一凸轮段261,此时,推动卷边辊轮221内收,复位弹簧27处于张紧状态,卷边辊轮221对金属盖6进行卷边,第一轴承224完全越过第一凸轮段261后,再复位弹簧27的作用下使卷边辊轮221与金属盖6分离;当第二轴承234开始滚动越过第二凸轮段262时,推动压边辊轮231内收,复位弹簧27处于张紧状态,压边辊轮231对金属盖6进行压边,第二轴承234完全越过第二凸轮段262后,再复位弹簧27的作用下使压边辊轮231与金属盖6分离,完成压盖封口的动作。
联动轴52通过第三齿轮55、第四齿轮56分别带动第一齿轮53和第二齿轮54转动的同时,联动轴52还通过第五齿轮58经过联动减速齿轮组57减速后,带动动力连接杆41转动,通过设置对应的减速比,联动轴52转动N圈,动力连接杆41转动1圈,即带动旋转凸轮42旋转1圈,由于在旋转凸轮42上设有凸轮高点及凸轮低点,滚动件44处于旋转凸轮42的凸轮高点时,会将活动杠杆43翘起,即将容器定位器322向上伸展开,当滚动件44处于旋转凸轮42的凸轮低点时,在重力的作用下,活动杠杆43翘起,即将容器定位器322向下缩回。即可实现,联动轴52旋转N圈,带动卷边辊轮221和压边辊轮231完成整个压盖动作后,容器定位器322实现一次上升和下降动作。
并且本实施例还设置一个单循环控制开关9,单循环控制开关9的是由固定在动力连接杆41上的单循环偏心轮7控制,单循环偏心轮7与动力连接杆41同时旋转,当单循环偏心轮7上的高点触碰单循环控制开关9后,就会关断驱动电机,此时已经刚好完成金属盖6的压盖工作,且容器定位器322向下缩回至原位置,工作人员即可将压盖完成的产品取下,再在容器定位器322上放置下一个产品,随后启动驱动电机71,开始下一工作循环。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种封罐机的凸轮机构、封罐机构及封罐机
- 自动封罐机七层封罐机头