一种海底测绘设备
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及测绘相关领域,具体是一种海底测绘设备。
背景技术
以海洋水体和海底为对象所进行的测量和海图编制工作统称为海洋测绘;它既是测绘科学的一个重要分支,又是一门涉及许多相关科学的一门综合性学科,是陆地测绘方法在海洋的应用与发展,海洋测量的对象是海洋,而海洋与陆地的最大差别是海底以上覆盖着一层动荡不定的、深浅不同的、所含各类生物和无机物质有很大区别的水体,由于这一水体,使目前海洋测量只能在海面航行或在海空飞行中进行工作,而难以在水下活动。
发明内容
本发明所要解决的技术问题是提供一种海底测绘设备,能克服上述问题。
本发明解决其技术问题所采用的技术方案是:一种海底测绘设备,包括机身以及所述机身内设置有的排水腔,所述排水腔底端在所述机身内设置有滑动腔,所述排水腔右侧在所述机身顶端设置有传动腔,所述机身右侧底端固定设置有电机,所述电机内可转动的设置有电机轴,所述电机轴左端固定连接有第一锥齿轮,所述第一锥齿轮与第二锥齿轮啮合,所述第二锥齿轮固定连接在第一传动轴上,所述第二锥齿轮左侧与第三锥齿轮啮合,所述第三锥齿轮固定连接在第一转轴右端,所述第一转轴转动连接在所述机身上,所述第一传动轴转动连接在所述机身上,在所述第一传动轴左侧所述机身内与所述第一传动轴左右对称的转动连接有第二传动轴,所述第一传动轴和所述第二传动轴两端前后对称的固定连接有两对第六锥齿轮,所述第六锥齿轮下方与第七锥齿轮啮合,所述第七锥齿轮固定连接在螺旋桨轴顶端,所述螺旋桨轴转动连接在螺旋桨座底端,所述螺旋桨轴底端固定连接有螺旋桨,所述第一传动轴和所述第二传动轴上前后对称的转动连接有两组螺旋桨座轴,所述螺旋桨座轴上固定连接有传动齿轮,所述传动齿轮上设置有动力装置,所述动力装置用于该设备上浮或者行进的动力提供;左侧后方所述螺旋桨座轴上固定连接有凸轮,所述凸轮上设置有探测装置,所述探测装置用于在该设备行进时进行触发进行对海底的探测;所述电机轴上固定连接有第一皮带轮,所述第一皮带轮上抵接有皮带,所述皮带上方抵接在第二皮带轮上,所述第二皮带轮固定连接在第二皮带轮轴上,所述第二皮带轮轴上设置有清障装置,所述清障装置用于对该设备行进过程中障碍的清理;所述机身顶端固定设置有压力传感器,所述压力传感器上设置有压力装置,所述压力装置用于根据水下压力控制排水调整该设备浮力。
进一步地,所述动力装置包括所述传动齿轮,所述传动齿轮底端与第一滑动齿条啮合,所述第一滑动齿条可左右滑动的设置在所述机身底端,所述第一滑动齿条左端固定连接有磁铁,所述磁铁通过磁铁弹簧弹性连接在电磁铁右端,所述电磁铁固定连接在磁铁电机上,所述磁铁电机固定设置在所述机身底端,所述第二传动轴上固定连接有第五锥齿轮,所述第五锥齿轮与第四锥齿轮啮合,所述第四锥齿轮固定连接在所述第一转轴左端。
进一步地,所述探测装置包括所述凸轮,所述凸轮右侧抵接在滑块左端,所述滑块可左右滑动的设置在所述滑动腔内,所述滑块右端通过滑块弹簧弹性连接在定块左端,所述定块固定设置在所述机身上,所述滑块右端固定连接有触点滑杆,所述触点滑杆右端可左右滑动的设置在所述定块内,所述触点滑杆右端固定连接有第一触点,所述机身底端固定设置有超声波发生器,所述超声波发生器左端固定连接有导电杆,所述导电杆左端固定连接有第二触点,所述超声波发生器底端固定连接有超声波探头,所述超声波发生器右端固定连接有温度盐度传感器。
进一步地,所述清障装置包括所述第二皮带轮轴,所述第二皮带轮轴左端固定连接有第八锥齿轮,所述第八锥齿轮上方与第九锥齿轮啮合,所述第九锥齿轮固定连接在转盘轴底端,所述转盘轴顶端在所述传动腔内固定连接有转盘,所述转盘上固定连接有转盘滑杆,所述转盘滑杆可滑动的设置在摆杆内,所述摆杆转动连接在摆杆转轴上,所述摆杆转轴固定连接在所述机身顶端,所述摆杆右端固定连接有不完全齿轮,所述不完全齿轮右侧与第二滑动齿条啮合,所述第二滑动齿条可前后滑动的设置在所述机身上,所述第二滑动齿条右侧与往复齿轮啮合,所述往复齿轮固定连接在往复齿轮轴底端,所述往复齿轮上固定连接有连接杆,所述连接杆下端固定连接在扰动杆上,所述扰动杆转动连接在清障杆上,所述清障杆固定连接在所述机身上,所述机身右端固定设置有蓄电池,所述蓄电池右端固定连接有灯座,所述灯座右端固定连接有照明灯泡,所诉照明灯泡外在所述灯座上固定连接有防水灯罩,所述防水灯罩右端固定连接有照明灯罩。
进一步地,所述压力装置包括所述压力传感器,所述压力传感器顶端固定连接有压力腔,所述压力腔顶端固定连接有压力感应球,所述排水腔下方固定设置有电机开关,所述电机开关左端固定连接有水泵电机,所述水泵电机内可转动的设置有涡轮轴,所述涡轮轴转动连接在水泵内,所述水泵内所述涡轮轴左端固定连接有涡轮,所述水泵左端固定连接有抽水管,所述水泵顶端固定连接有进水管,所述进水管连通在所述排水腔内。
本发明的有益效果:一种海底测绘设备,设备结构简单,操作方便,可以在水下自动对海底地形进行测绘,各个工序之间相互配合而又不影响,在测绘过程中可驱赶前方的鱼群防止该设备被破坏,有效的避免了人力物力的浪费,从而大幅减少成本。
附图说明
为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
下面结合附图和实施例对本发明进一步说明。
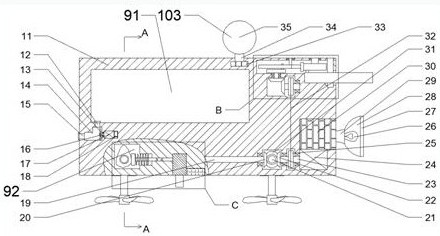
图1是本发明的一种海底测绘设备的整体结构示意图。
图2是图1中A-A的结构示意图。
图3是图1中B的放大结构示意图。
图4是图1中C的放大结构示意图。
图5是图3中D-D的放大结构示意图。
图6是图2中E-E的放大结构示意图。
具体实施方式
下面结合图1-6对本发明进行详细说明,其中为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。
结合附图1-6所述的一种海底测绘设备,包括机身11以及所述机身11内设置有的排水腔91,所述排水腔91底端在所述机身11内设置有滑动腔92,所述排水腔91右侧在所述机身11顶端设置有传动腔93,所述机身11右侧底端固定设置有电机24,所述电机24内可转动的设置有电机轴23,所述电机轴23左端固定连接有第一锥齿轮22,所述第一锥齿轮22与第二锥齿轮31啮合,所述第二锥齿轮31固定连接在第一传动轴21上,所述第二锥齿轮31左侧与第三锥齿轮20啮合,所述第三锥齿轮20固定连接在第一转轴19右端,所述第一转轴19转动连接在所述机身11上,所述第一传动轴21转动连接在所述机身11上,在所述第一传动轴21左侧所述机身11内与所述第一传动轴21左右对称的转动连接有第二传动轴40,所述第一传动轴21和所述第二传动轴40两端前后对称的固定连接有两对第六锥齿轮48,所述第六锥齿轮48下方与第七锥齿轮47啮合,所述第七锥齿轮47固定连接在螺旋桨轴45顶端,所述螺旋桨轴45转动连接在螺旋桨座46底端,所述螺旋桨轴45底端固定连接有螺旋桨44,所述第一传动轴21和所述第二传动轴40上前后对称的转动连接有两组螺旋桨座轴49,所述螺旋桨座轴49上固定连接有传动齿轮43,所述传动齿轮43上设置有动力装置100,所述动力装置100用于该设备上浮或者行进的动力提供;左侧后方所述螺旋桨座轴49上固定连接有凸轮41,所述凸轮41上设置有探测装置101,所述探测装置101用于在该设备行进时进行触发进行对海底的探测;所述电机轴23上固定连接有第一皮带轮25,所述第一皮带轮25上抵接有皮带32,所述皮带32上方抵接在第二皮带轮55上,所述第二皮带轮55固定连接在第二皮带轮轴54上,所述第二皮带轮轴54上设置有清障装置102,所述清障装置102用于对该设备行进过程中障碍的清理;所述机身11顶端固定设置有压力传感器33,所述压力传感器33上设置有压力装置103,所述压力装置103用于根据水下压力控制排水调整该设备浮力。
有益地,所述动力装置100包括所述传动齿轮43,所述传动齿轮43底端与第一滑动齿条83啮合,所述第一滑动齿条83可左右滑动的设置在所述机身11底端,所述第一滑动齿条83左端固定连接有磁铁82,所述磁铁82通过磁铁弹簧81弹性连接在电磁铁80右端,所述电磁铁80固定连接在磁铁电机79上,所述磁铁电机79固定设置在所述机身11底端,所述第二传动轴40上固定连接有第五锥齿轮39,所述第五锥齿轮39与第四锥齿轮38啮合,所述第四锥齿轮38固定连接在所述第一转轴19左端。
有益地,所述探测装置101包括所述凸轮41,所述凸轮41右侧抵接在滑块58左端,所述滑块58可左右滑动的设置在所述滑动腔92内,所述滑块58右端通过滑块弹簧59弹性连接在定块62左端,所述定块62固定设置在所述机身11上,所述滑块58右端固定连接有触点滑杆60,所述触点滑杆60右端可左右滑动的设置在所述定块62内,所述触点滑杆60右端固定连接有第一触点61,所述机身11底端固定设置有超声波发生器65,所述超声波发生器65左端固定连接有导电杆64,所述导电杆64左端固定连接有第二触点63,所述超声波发生器65底端固定连接有超声波探头66,所述超声波发生器65右端固定连接有温度盐度传感器67。
有益地,所述清障装置102包括所述第二皮带轮轴54,所述第二皮带轮轴54左端固定连接有第八锥齿轮53,所述第八锥齿轮53上方与第九锥齿轮52啮合,所述第九锥齿轮52固定连接在转盘轴70底端,所述转盘轴70顶端在所述传动腔93内固定连接有转盘69,所述转盘69上固定连接有转盘滑杆71,所述转盘滑杆71可滑动的设置在摆杆68内,所述摆杆68转动连接在摆杆转轴72上,所述摆杆转轴72固定连接在所述机身11顶端,所述摆杆68右端固定连接有不完全齿轮73,所述不完全齿轮73右侧与第二滑动齿条74啮合,所述第二滑动齿条74可前后滑动的设置在所述机身11上,所述第二滑动齿条74右侧与往复齿轮77啮合,所述往复齿轮77固定连接在往复齿轮轴76底端,所述往复齿轮77上固定连接有连接杆75,所述连接杆75下端固定连接在扰动杆51上,所述扰动杆51转动连接在清障杆78上,所述清障杆78固定连接在所述机身11上,所述机身11右端固定设置有蓄电池30,所述蓄电池30右端固定连接有灯座29,所述灯座29右端固定连接有照明灯泡26,所诉照明灯泡26外在所述灯座29上固定连接有防水灯罩28,所述防水灯罩28右端固定连接有照明灯罩27。
有益地,所述压力装置103包括所述压力传感器33,所述压力传感器33顶端固定连接有压力腔34,所述压力腔34顶端固定连接有压力感应球35,所述排水腔91下方固定设置有电机开关18,所述电机开关18左端固定连接有水泵电机17,所述水泵电机17内可转动的设置有涡轮轴16,所述涡轮轴16转动连接在水泵14内,所述水泵14内所述涡轮轴16左端固定连接有涡轮13,所述水泵14左端固定连接有抽水管15,所述水泵14顶端固定连接有进水管12,所述进水管12连通在所述排水腔91内。
整个装置的机械动作的顺序 :
当本发明的设备工作时,将该设备放入待测绘海域,海水经抽水管15进入水泵14内,水泵14内的海水在压力作用下经进水管12进入排水腔91内,该设备在重力作用下下沉,压力感应球35将海水压力经压力传感器33传出,当该设备到底指定位置时电机开关18被触发启动水泵电机17,涡轮轴16及涡轮轴16上的涡轮13转动,将排水腔91内的水排出设备,此时启动电机24,电机轴23及电机轴23上的第一锥齿轮22转动,第一锥齿轮22带动第二锥齿轮31转动,第二锥齿轮31带动第一传动轴21转动,第二锥齿轮31带动第三锥齿轮20及第一转轴19转动,第一传动轴21和第二传动轴40同步转动,第一传动轴21和第二传动轴40带动第六锥齿轮48转动,第六锥齿轮48带动第七锥齿轮47转动,第七锥齿轮47带动螺旋桨轴45及螺旋桨轴45上的螺旋桨44转动,该设备在螺旋桨44转动的作用及排水后重力减少作用下该设备维持一定高度不再下沉,此时启动磁铁电机79,磁铁电机79驱动电磁铁80将磁铁82向右吸引压紧磁铁弹簧81,磁铁82向右滑动带动第一滑动齿条83向右滑动,第一滑动齿条83带动传动齿轮43转动,传动齿轮43带动螺旋桨座轴49顺时针转动,螺旋桨座轴49带动螺旋桨座46顺时针转动九十度,从而推动该设备行进,左侧后方螺旋桨座轴49转动带动凸轮41转动,凸轮41转动抵压滑块58向右滑动压紧滑块弹簧59,触点滑杆60随滑块58向右滑动带动第一触点61向右滑动与定块62连接,从而启动超声波发生器65,超声波发生器65通过超声波探头66发射超声波至海底对海底进行测绘,温度盐度传感器67可根据海水温度盐度从而改变超声波速率保证数据的准确性,行进过程中启动蓄电池30,蓄电池30为照明灯泡26提供电源,照明灯泡26进行照明,电机轴23带动第一皮带轮25转动,第一皮带轮25通过皮带传动带动第二皮带轮55转动,第二皮带轮55带动第二皮带轮轴54转动,第二皮带轮轴54带动第八锥齿轮53转动,第八锥齿轮53带动第九锥齿轮52转动,第九锥齿轮52带动转盘轴70转动,转盘轴70带动转盘69转动,转盘69带动转盘滑杆71转动,转盘滑杆71在摆杆68内滑动带动温度盐度传感器67绕摆杆转轴72往复转动,摆杆68下方的不完全齿轮73往复转动带动第二滑动齿条74前后往复滑动,第二滑动齿条74带动往复齿轮77往复转动,往复齿轮77带动连接杆75往复转动,连接杆75带动扰动杆51绕清障杆78往复摆动从而驱散该设备行进路上的鱼群等海洋生物。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
- 一种海底测绘设备
- 一种基于仿生机器人的无人艇海底地形测绘控制系统实现的控制方法