一种实时监测超声速进气道流动状态的方法
文献发布时间:2023-06-19 10:27:30
技术领域
本发明属于超声速进气道流动状态监测技术领域,具体涉及一种实时监测超声速进气道流动状态的方法。
背景技术
超声速进气道作为吸气式超声速推进系统的关键部件之一,其流动状态对整个系统的性能有直接影响。例如,超声速进气道喘振是一种极其不稳定的流动状态,通常伴随着剧烈的、周期性的激波振荡,这将使得整个推进系统的推力特性严重恶化,并且时刻面临着熄火的风险。不仅如此,随激波振荡产生的周期性热力载荷也会使整个系统的可操控性急剧变差,甚至还可能直接导致整体结构的破坏,对飞行器与人员的安全构成威胁。从保护控制的角度来说,由于在不同的流动状态下,超声速进气道表现出不同的流动特点,因此采取的控制措施也应有所不同。因此,为了降低喘振现象的安全威胁以及更好地控制推进系统,对超声速进气道的流动状态进行监测是非常重要的。
目前,对于超声速进气道流动状态的监测方法主要包括基于高速纹影摄像的方法和数据驱动的方法。基于高速纹影摄像的方法直观、可靠,但需要复杂的光路系统,仅在地面试验中可行,在实际飞行中显然不现实。数据驱动的方法是基于CFD仿真数据或者试验数据,利用机器学习等技术进行智能化监测。该方法不需要复杂的光路系统,既适用于地面试验,也适用于实际飞行,并且可以利用地面试验或实际飞行中不断产生的新数据修正已有的模型,充分挖掘历史数据和实时数据中的有效信息,在提高数据利用率的同时,使得模型对于外界条件的适应性较强。目前,对于数据驱动方法的研究主要是基于少量的CFD稳态仿真数据,而实际测量装置采集的通常是大量的动态试验数据。因此,在以往的研究过程中会忽略实际试验数据中的动态特性以及噪声、干扰等因素的影响。本发明采用数据驱动的方法,直接基于动态试验数据监测进气道的流动状态。
另外,如何在进气道内部合适的位置上放置传感器也是超声速进气道实时监测问题的一个重要内容。为了增加单个传感器监测结果的可靠性和鲁棒性,需要安装多个传感器共同进行监测。一方面,由于安装和维护成本以及结构、重量等因素的限制,使得只能在进气道内部安装少量的传感器。另一方面,不合理的传感器放置方案因为没有采集到与进气道特性相关的重要信息,也会降低监测效果。因此,传感器的数目需要限制在一定的范围内,同时传感器的放置方案也需要具有一定的合理性。目前,对于解决传感器如何放置的问题主要包括启发式方法和优化方法。启发式方法需要建立精准的数学模型,而很多情况下无法建立精准的数学模型,因此限制了该方法的使用。优化方法是将传感器放置问题转化为单目标优化问题,然后借助优化的手段进行求解。然而,在实际应用中,常常需要同时考虑多个有冲突的目标。例如,既要求传感器的数目较少,也要求监测误差较低,同时要求最大化各个传感器之间的信息差异等。因此,本发明将传感器放置问题归结为一个多目标优化问题,并借助多目标优化算法进行求解。
发明内容
针对上述问题,本发明提出一种用于实时监测超声速进气道流动状态的方法,可以直接基于动态试验数据来监测超声速进气道的流动状态。该集成算法相对于单个传感器的监测效果,不仅增加了监测结果的可靠性和鲁棒性,而且在满足实时监测的要求下,精度也进一步有所提升。另外,本发明通过多目标优化方法得到的一组传感器还可以用于指导在进气道中合适的位置上放置传感器。
为实现上述目的,本发明采用如下技术方案:
本发明提出一种用于实时监测超声速进气道流动状态的集成算法。该算法首先基于每个传感器数据分别建立本发明所提出的DTW-RBF网络,然后通过多目标优化和模糊决策选择一组最佳的传感器进行集成,以克服单个传感器监测的波动性和不可靠性。
首先,简要介绍一下DTW距离、LM算法、传统的RBF网络和NSGA-II 多目标优化算法等预备知识,然后再具体描述本发明提出的DTW-RBF网络和利用多目标优化和模糊决策选择一组最佳的传感器进行集成的过程。
1预备知识
1)DTW距离
动态时间规整(Dynamic Time Warping,简称DTW)距离是时间序列分类任务中最常用的相似性度量指标之一。给定两条时间序列s和q如下:
s=s
q=q
其中,n和l分别是s和q的长度。代价矩阵(距离矩阵)Dist
DTW距离旨在找到一条长度为K的规整路径w=(w
其中,δ(w
问题(2)可以通过动态规划解决。累积距离矩阵Cost
Cost(i,j)=Dist(i,j)+min{Cost(i-1,j),Cost(i,j-1),Cost(i-1,j-1)} (3)
其中,1≤i≤n,且1≤j≤l。Cost
算法1总结了计算DTW距离的流程
在计算出DTW距离后,可以通过逆向追溯过程得到相应的规整路径。与欧式距离相比,DTW距离可以处理长度不等的时间序列,并且当两条时间序列一样时,DTW距离将退化为欧式距离。
1)LM算法
误差反向传播(Error Backpropagation,简称EBP)算法是最常用的一阶训练算法,但是EBP算法的效率比较低下。二阶训练算法,比如LM(Levenberg– Marquardt)算法,由于较快的收敛速度,可以极大地提升训练效率。LM算法通常用于优化非线性最小二乘问题:(下面的公式应该是用转置,是向量)
其中,E(u)是误差的平方和,u是N×1的参数向量,e
LM算法结合了高斯-牛顿法在接近最优点时优秀的局部收敛性能和最速下降法在远离最优点时使误差持续下降的能力,其对于参数的更新公式为:
Δu=[H(u)]
其中,H(u)是海森矩阵,G(u)是误差梯度向量,Q(u)是拟海森矩阵,I是单位阵,μ是连接系数。
J(u)是(P×M)×N的雅可比矩阵,e(u)是(P×M)×1的误差向量。e(u)是由每个e
从式(5)和式(6)可以看出,LM算法需要计算和存储雅可比矩阵,而雅可比矩阵的大小是和训练样本的个数P以及输出节点的个数M成正比的。因此,由于内存的限制,LM算法不能适用于规模较大的问题。为了克服这个缺点,拟海森矩阵Q(u)和误差梯度向量G(u)可以直接由子矩阵和子向量相加可得,而不需要存储雅可比矩阵。Q(u)和G(u)的计算公式如下:
算法2总结了LM算法的流程
1)传统的RBF网络
传统的RBF网络属于前向浅层网络,通常包括三层:输入层、基于非线性 RBF核函数的隐含层以及输出层,如图2所示。
由于使用了非线性RBF核函数,传统的RBF网络可以具有通用逼近能力,并且被广泛地用于分类和回归任务。然而,由于时间序列数据的动态性、长度不等以及平移和扭曲等特点,基于欧式距离的RBF核函数不能很好地处理时间序列分类任务。因此,本发明提出了基于DTW距离的RBF网络(简称DTW-RBF 网络)。DTW-RBF网络利用了DTW距离弹性匹配的能力,可以有效地克服欧式距离在解决时间序列分类任务时的缺点。
1)NSGA-II多目标优化算法
多目标优化问题需要同时优化两个或多个不同的目标,如下式所示。
其中,β是决策变量,每个元素都在
解决多目标优化问题的一种方法是利用多目标优化算法。多目标优化算法旨在找到帕累托最优前沿面,帕累托最优前沿面上的解叫做帕累托最优解。多目标优化算法通常维护一个由若干个体组成的种群,每个个体代表多目标优化问题的一个解。多目标优化算法的目的是使得该种群能很好地收敛到帕累托最优前沿面。
NSGA-II是一种常用的多目标优化算法。与遗传算法类似,NSGA-II首先产生一个初始种群,并且通过遗传算子和非支配排序的机制不断更新种群。 NSGA-II的流程如图3所示。
2DTW-RBF网络
监测进气道流动状态可以被归结为时间序列分类任务。传统的RBF网络由于使用的是基于欧式距离的RBF核函数,因此不能很好地处理时间序列数据中的动态性、长度不等、平移和扭曲等特点。本发明将传统的RBF核函数中的欧式距离替换为DTW距离以解决上述问题,并且利用LM算法训练DTW-RBF网络中的所有参数,包括中心序列{C
DTW-RBF网络的训练过程包含两个步骤:1)前向计算;2)梯度计算和参数更新,具体过程如下。
1)前向计算
给定第p个训练样本x
其中,hid=1,2,…,N
在计算出所有隐含层节点的输出后,DTW-RBF网络的第m个输出层节点的输出为:
其中,p=1,2,…,P是训练样本的个数,m=1,2,…,M是输出层节点的个数, W
使用Soft-max层,可以得到x
在本发明中,为了使用LM算法训练参数,将目标函数定义为误差的平方和:
其中,y
2)梯度计算和参数更新
在完成前向计算后,为了使用LM算法训练所有的参数,首先需要计算出每个e
x
DTW(x
在计算出每个误差e
算法3总结了本发明所提出的DTW-RBF网络及其训练流程。
很多研究表明,对于时间序列分类任务,以DTW距离作为相似性度量的最近邻分类器(NN-DTW)很难被打败,因此许多文章中将该方法作为对比基准。
计算DTW距离本身的复杂度为O(nl),n和l分别是两条时间序列的长度。因为NN-DTW需要计算每个测试样本与所有训练样本之间的DTW距离,所以每个测试样本的计算复杂度为O(Pnl)。其中,P是训练样本的个数。当训练样本较多时,整个测试过程会非常耗时。
相反地,DTW-RBF网络的复杂度要比NN-DTW低得多。假设核函数的个数为N
3基于多目标优化和模糊决策的传感器放置和集成
为了增加单个传感器监测效果的稳定性和鲁棒性,可以集成多个传感器的信息来共同监测。但是,如果在进气道上安装过多的传感器,传感器采集到的信息可能会存在冗余,并且过多的传感器也会增加控制器逻辑的复杂性以及安装和维护成本。另一方面,不合理的传感器放置方案也会由于采集到冗余和无关的信息而降低监测效果。因此,需要在进气道上合适的位置放置适量的传感器。两个需要同时考虑的优化目标为:1)最小化传感器集成后的监测误差;2)最小化用于集成的传感器数量。本发明将传感器放置和集成问题归结为多目标优化问题,并借助NSGA-II算法进行求解。
基于单个传感器数据建立的子分类器可以计算出一个样本x
其中,M是所有类别的个数,T是所有候选传感器的个数。H
第一个优化目标可以表示为:
其中,P是训练样本的数量,Ind(*)是指示函数。
第二个优化目标可以表示为:
集成更多的传感器可能会因为利用了更多的信息而使得监测误差更小,但是更多的传感器也意味着安装和维护成本的增加,同时也会降低集成分类器的实时性能。因此,需要将传感器的数量限制在一定范围内。综上,传感器放置和集成问题可以被归结为如下的多目标优化问题:
对于NSGA-II求解得到的某个帕累托最优解,可能存在多种传感器放置方案。也就是说,这些放置方案不仅选择的传感器数量一样,并且集成后的监测误差也一样。在这种情况下,为了利用更多不同的信息,应该选择基于不同传感器数据建立的子分类器之间差异最大的那个方案。子分类器之间的差异可以用混淆矩阵度量。混淆矩阵是一个方阵,当中的每个元素表示分类器将第i类样本判定成第j类的样本个数,如图5所示。
假设某个传感器放置方案包含了S个传感器,分别对应着S个子分类器,那么这种方案的子分类器之间的平均差异可以由下式计算:
其中,U
在为每个帕累托最优解确定了最佳的传感器放置方案后,为了进一步地从这些帕累托最优解中选出一个折衷方案,本发明采用一种基于模糊策略的方法。假设第j个帕累托最优解的第i个目标函数的隶属度为:
其中,obj
其中,V代表了所有帕累托最优解的个数,L是所有目标函数的个数。因此,最终应该选择μ
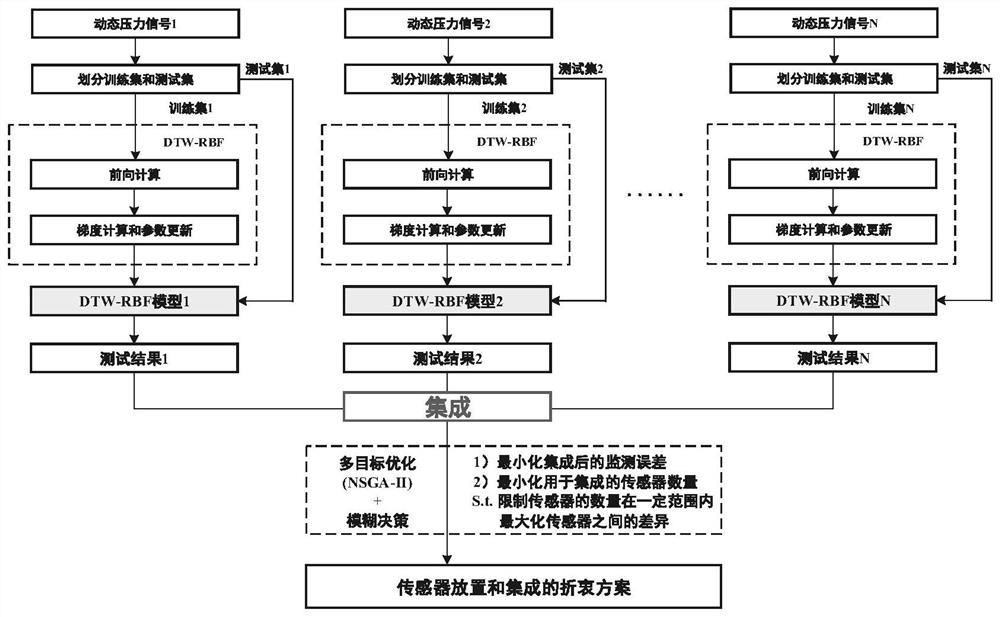
上述基于多目标优化和模糊决策的传感器放置和集成的流程如图6所示。本发明首先基于各个传感器数据建立子分类器,然后利用多目标优化和模糊决策选择一组最佳的传感器进行集成。
有益效果:(1)DTW-RBF网络将传统的RBF核函数中的欧式距离替换为 DTW距离,既利用了DTW距离的弹性匹配能力,也利用了RBF网络灵活的拓扑结构,因此对于时间序列分类任务具有很强的非线性映射能力,同时其计算复杂度比NN-DTW小得多;
(2)基于多目标优化和模糊决策的传感器放置和集成,既考虑了传感器的数量限制,也考虑了传感器放置方案的合理性,从而能够确保在合适的位置上放置适量的传感器;
(3)本发明提出一种用于实时监测超声速进气道流动状态的集成算法。该集成算法首先基于各个传感器数据建立相应的子分类器(DTW-RBF网络),然后再通过多目标优化和模糊决策选择一组最佳的传感器进行集成,因此既克服了利用单个传感器进行监测的波动性和不稳定性,同时由于利用了更多传感器的信息而降低了监测误差。
附图说明
图1是DTW示意图;
图2是传统的RBF网络结构示意图;
图3是NSGA-II算法的流程图;
图4是本发明所提出的DTW-RBF网络结构示意图;
图5是混淆矩阵示意图;
图6是传感器放置和集成流程图;
图7是Friedman检验图;
图8是一类二元外压式超声速进气道的基本构型;
图9是R01和R14的动态压力信号;
图10是利用各个传感器进行监测的精度;
图11是各种方法对每个样本的测试时间;
图12是基于DTW距离的三种方法对于单个样本需要计算DTW距离的次数;
图13是采样频率对于监测精度的影响;
图14是帕累托最优解和相应的传感器放置方案;
图15是不合理的传感器放置方案;
图16是最佳的传感器放置方案。
具体实施例
本发明利用公共数据集和一类二元外压式超声速进气道的数据来验证所提出的DTW-RBF网络和基于多目标优化和模糊决策的传感器放置和集成的有效性。其中,公共数据集来自于UCR Time Series Classification Archive。所有实验都在配置为IntelRCoreTM、i7-7700HQ CPU、2.80GHz主频、8G内存、Windows10 系统和MATLAB 2018b版本的笔记本电脑上执行。
为了证明DTW-RBF网络的有效性,本发明将其与其它的时间序列分类方法进行了对比,包括以DTW距离作为相似性度量的最近邻分类器(NN-DTW)、以欧式距离作为相似性度量的最近邻分类器(NN-EUC)、多层感知机(MLP)、长短期记忆网络(LSTM)、基于欧式距离的传统的RBF网络(EUC-RBF)以及基于DTW距离的支持向量机(DTW-SVM)。
在具体实施过程中,将所有数据集按照6:2:2的比例划分成训练集、验证集和测试集。其中,验证集用于选择所有方法的最佳超参数(验证集精度最大时对应的超参数),测试集用于比较所有方法的性能。MLP、LSTM、EUC-RBF和 DTW-RBF的隐含层节点范围均设置成[10,20],DTW-SVM的惩罚系数c和核函数宽度γ的范围均设置成[2
本发明的具体实施方式主要由以下几个步骤构成:
步骤1:利用公共数据集验证DTW-RBF网络在时间序列分类任务中的有效性;
步骤2:利用一类二元外压式超声速进气道的试验数据验证DTW-RBF网络实时监测流动状态的有效性。
采集一类二元外压式超声速进气道在额定状态下的节流过程中进气道壁面上各个传感器的动态压力信号,并利用滑动窗口对采集到的压力信号进行切分,得到不同流动状态下的样本。
步骤3:分别基于各个传感器的样本建立DTW-RBF网络,并与对比方法的监测效果进行比较;
步骤4:基于多目标优化和模糊决策选出一组最佳的传感器进行集成,并与利用单个传感器以及不合理的传感器放置方案的监测效果进行对比;
有益效果:DTW-RBF网络在时间序列分类和进气道流动状态监测任务中可以取得较高的精度,基于多目标优化和模糊决策的传感器集成可以进一步提升监测精度,降低利用单个传感器进行监测的波动性和不稳定性,从而有效解决实时监测超声速进气道流动状态的问题。
1利用公共数据集验证DTW-RBF网络在时间序列分类任务中的有效性
首先,利用公共数据集验证DTW-RBF网络在时间序列分类任务中的有效性。数据集的信息和相应的测试结果分别如表1和表2所示。从表2可以看出, DTW-RBF网络的在所有数据集上的平均序值为2.23,并且测试时间较低,因此相比于其它方法较好。虽然其它两种基于DTW距离的方法(NN-DTW和 DTW-SVM)的分类效果也较好,但是它们的测试时间较长。
表1基准数据集信息
表2基准数据集的测试时间与测试精度
本发明也做了一些非参数统计检验(Friedman检验和Nemenyi后续检验) 来对比各种方法的性能。Friedman检验中的参数τ
其中,k是对比方法的个数,D是数据集的个数,r
经过计算,当k=7且D=26时,τ
临界值域(Critical Difference,简称CD)的计算公式如下:
其中,当α=0.05、k=7且D=26时,q
从图7也可以看出,NN-DTW和EUC-RBF的分类性能比NN-EUC要好,这也启发了本发明将DTW距离和传统的RBF网络相结合。另外,基于DTW距离的方法,包括NN-DTW、DTW-SVM以及DTW-RBF,比其它方法的分类性能要好,但是DTW-RBF的测试时间要比NN-DTW和DTW-SVM少得多。
2利用一类二元外压式超声速进气道的数据验证DTW-RBF网络实时监测流动状态的有效性
在实时监测超声速进气道流动状态的案例中,首先采集一类二元外压式超声速进气道在额定状态下的节流过程中进气道壁面上各个传感器的动态压力信号,利用滑动窗口对采集到的压力信号进行切分,得到不同流动状态下的样本,并将其按照6:2:2的比例划分成训练集、验证集和测试集。然后,分别基于各个传感器的样本,利用算法3建立DTW-RBF网络。为了降低利用单个传感器监测的波动性与不稳定性,再基于多目标优化和模糊决策选出一组最佳的传感器进行集成,并与利用单个传感器以及不合理的传感器放置方案的监测效果进行对比。
本发明的研究对象是一类二元外压式超声速进气道,其基本构型如图8所示。该进气道的设计马赫数为2.0,理论捕获面积为48.0mm×40.0mm,面积收缩比为 1.5。上方压缩面采用部分等熵设计,由一级斜楔和一级等熵面构成。为了兼顾亚音速工况下的气动性能、防止唇罩内侧形成大面积的流动分离,对该进气道唇罩前缘采取了钝化处理。口部下游为一段单侧扩张通道,其后还接有一段等直流道。在进气道两侧均嵌有光学玻璃用于内流场观察,其可视窗口范围可覆盖内流道的核心区域。为了模拟实际工作中的下游节流效应,在进气道出口处设置了一个楔形节流锥,其前缘位于通道出口的中心高度处。在步进电机的推动下,该节流锥可沿轴向平移,以此在进气道出口处建立可控的堵塞度。本发明采用堵塞度来表征进气道下游的壅塞程度。实验过程中,节流锥会从远下游位置处经数十次台阶式进锥后移动至与出口接近贴合状态,使堵塞度逐渐从0%增加至99.1%。为了获取节流过程中进气道流场内的动态压力信息,在流道上、下内表面的中心线上共设置了31个流向分布的动态压力测点,测量范围覆盖内流道的核心区域。依据位置的不同,将上述传感器分别编号为C01-C17和R01-R14,具体实验条件如表3所示。图9显示了R01和R14在节流过程中的动态压力信号。在此过程中,进气道分别经历了稳定流动状态、小喘流动状态、混合喘流动状态和大喘流动状态。利用滑动窗口对采集到的压力信号进行切分,得到不同流动状态下的样本,并将其按照6:2:2的比例划分成训练集、验证集和测试集。
表3实验参数
2.1利用单个传感器进行监测
分别基于各个传感器的样本建立DTW-RBF网络,其结果如表4所示,各个传感器的监测精度如图10所示,其中横轴上的1-17代表传感器C01-C17,18-31 代表传感器R01-R14。表5列出了DTW-RBF网络与其它对比方法在31个传感器上的监测精度获胜的情况。
表4各种方法利用单个传感器进行监测的结果对比
表5 DTW-RBF网络与其它对比方法在31个传感器上监测精度获胜的次数
由图10和表5和可以看出,本发明的DTW-RBF网络在大多数传感器上的监测精度要普遍高于其它对比方法。其中,NN-DTW和EUC-RBF在大多数传感器上的监测精度高于NN-EUC,这也间接地启发了本发明用DTW距离替换RBF 核函数中的欧式距离。值得注意的是,所有方法在各个传感器上的监测精度均波动较大,这也就意味着只用一个传感器进行监测不稳定,因此需要集成一组传感器共同监测。
各种方法对每个样本的测试时间如图11所示。一方面,因为NN-EUC与 NN-DTW这两种方法需要计算每个测试样本与所有训练样本之间的欧式距离或者DTW距离,而EUC-RBF与DTW-RBF只需要计算每个测试样本与隐含层核函数之间的欧式距离或者DTW距离,因此EUC-RBF与DTW-RBF的测试时间比NN-EUC和NN-DTW要少得多。NN-EUC和NN-DTW的测试时间会随着训练样本的增加而增加,而只要隐含层节点数不变,EUC-RBF与DTW-RBF的测试时间也几乎不会变。从表4可以看出,在31个传感器上,每个样本的平均测试时间为2毫秒左右,可以满足实时性的要求。另一方面,基于DTW距离的方法,包括NN-DTW、DTW-SVM以及DTW-RBF,对于单个样本的主要计算量在于DTW距离计算的次数。图12显示了基于DTW距离的三种方法对于单个样本需要计算DTW距离的次数。
对于单个测试样本,NN-DTW需要计算DTW距离的次数等于训练样本的个数,DTW-SVM需要计算DTW距离的次数等于支持向量的个数,而DTW-RBF 需要计算DTW距离的次数等于隐含层节点的个数。但是,由于DTW-SVM所用的核函数不是半正定的,因此它的解缺乏稀疏性,这也就意味着有许多支持向量。因此,当训练样本个数增加时,NN-DTW和DTW-SVM需要计算DTW距离的次数也会相应增加,而只要DTW-RBF的结构不变,则DTW-RBF需要计算DTW 距离的次数几乎不变。
在实际工程中,采样频率达不到本发明所采用的20kHz,因此本发明也研究了采样频率对于监测效果的影响,其结果如图13所示。当采样频率由20kHz逐步降低至8kHz时,31个传感器的平均监测精度几乎不变,可能的原因是过高的采样频率导致了冗余信息,在降低频率的过程中,冗余信息也会相应减少。但是,当采样频率过低时,有些重要信息未被采集,因此监测精度也较低。
总之,经过公共数据集和进气道试验数据的验证,本发明所提出的DTW-RBF 网络具有较好的综合性能。
3基于多目标优化和模糊决策的传感器放置和集成
从图10可以看出,各种方法的监测精度在不同的传感器位置处波动很大,因此只利用单个传感器监测进气道的流动状态是不稳定的。本发明将采用 NSGA-II和模糊决策来选择一组最佳的传感器进行集成。
在利用NSGA-II求解式(23)后,最佳的帕累托最优解和相应的传感器放置方案如图14所示。一方面,随着所选传感器数量的增加,更多的信息将被用来监测进气道精度,因此监测误差也会相应下降。但是,如果选择过多的传感器,将会存在冗余或者不相关的信息,这将会降低监测效果。另一方面,即使传感器数量满足了限制条件,但是不合理的放置方案也会影响监测效果。图15给出了一些不合理的放置方案,主要是由相邻的传感器组成。表6列出了中各种方案的监测误差。从表中可以看出,每种不合理的放置方案的监测误差都要大于相同传感器数量下的帕累托最优解。因此,尽管我们需要将传感器数量限制在一定范围内,但是合理的传感器放置方案也同样重要。为了从图14的三个帕累托最优解中选择一个折衷的解,本发明采用了模糊策略。表7列出了帕累托最优解的每个子目标的模糊变量值。
表6不合理的传感器放置方案的监测误差与帕累托最优误差的对比
表7各子目标的模糊变量值
由于方案[C01 C11 R08]具有最大的模糊变量值之和,因此本发明将其作为折衷的解。图16显示了这三个传感器的分布。可以看出,这三个传感器分布在进气道的不同区域,并且相距较远,这也就意味着这三个传感器可以采集到不同流动特点的信息用于监测进气道的流动状态。同时,这种方案对于每个样本的测试时间可以简单地认为是每个传感器的测试时间之和,大约是4.84毫秒,因此仍然满足实时监测的要求。
- 一种超声速进气道流动状态的实时监测方法
- 基于区分性特征学习的超声速进气道流动状态监测方法