基于零序电压最小空间矢量调制控制的级联多电平变换器
文献发布时间:2023-06-19 10:43:23
技术领域
本发明属于逆变器调制领域,涉及一种基于零序电压最小空间矢量调制控制的级联多电平变换器。
背景技术
级联型多电平变换器拓扑是出现最早的一种多电平变换器电路,经过二十几年的发展,特别是工业生产对中高压大功率变换器的需求增加,人们对这种变换器拓扑结构给予了极大的关注。级联型变换器以低压功率器件实现高压大容量输出,克服了变换器电压等级和容量受限于单个功率开关器件耐压和容量的问题,可以根据应用需求增加级联单元数量以增加输出电压的电平数,从而提高变换器的电压等级及容量。级联型变换器具有模块化程度高、易于扩展和控制、可靠性好、谐波含量低等特点,因此级联型结构有广泛的应用范围。
空间矢量脉冲宽度调制(Space Vector Pulse Width Modulation-SVPWM)技术是正弦脉冲宽度调制(Sinusoidal Pulse Width Modulation-SPWM)技术与交流电机磁链圆形轨迹相结合的一种PWM控制法。其实现方法是当交流电机以三相对称正弦波电压供电时产生的理想圆形磁链轨迹为基准,用全控型开关器件的不同开关状态组合控制产生的磁链去逼近理想圆形磁链轨迹,从而得到期望的输出电压。与传统的SPWM技术相比,SVPWM技术的功率开关器件的开关次数可以减少1/3,直流电压利用率可以提高15%,且易于实现实时的数字化控制,因此得到广泛的应用。
传统SVPWM技术首先通过克拉克变换将三相参考电压转化为二维直角坐标平面上的参考矢量,然后对参考矢量进行定位,确定距离参考矢量最近的三个基本矢量,依据伏秒平衡原理用最近的三个基本矢量合成参考矢量并计算出相应基本矢量的作用时间,之后计算出基本矢量对应的开关状态,确定开关状态切换顺序,最后将开关状态转化为具体的开关器件的控制信号,控制各个级联单元的工作,实现对三相变换器的空间矢量调制。由基本矢量计算对应的开关状态需要解一个非齐次线性方程组,非齐次线性方程组的解有无穷个,考虑到实际级联单元数有限,可得到有限个解,即存在一个基本矢量对应多个开关状态(称为冗余开关状态)。冗余开关状态导致计算工作量大、切换路径选择复杂等问题,当级联单元数增加,计算量呈指数上升,SVPWM实现难度大大增加。
基于上述传统SVPWM技术实现困难的问题,有必要研究一种新的级联多电平变换器空间矢量调制方法。
发明内容
本发明的目的就是针对传统级联多电平变换器空间矢量调制算法存在的上述问题,提出一种基于零序电压最小空间矢量调制控制的级联多电平变换器,此方案通过附加一个特定的约束条件将SVPWM算法中基本矢量和开关状态之间映射的非齐次线性方程组转换为齐次线性方程组,求解新的齐次线性方程组,即可得到特定约束条件下基本矢量对应的开关状态,并且所得开关状态为此基本矢量对应的所有开关状态中零序电压最小的一个。该简化SVPWM方法适用于任意级数多电平变换器。
为达到上述目的,本发明的技术方案为:
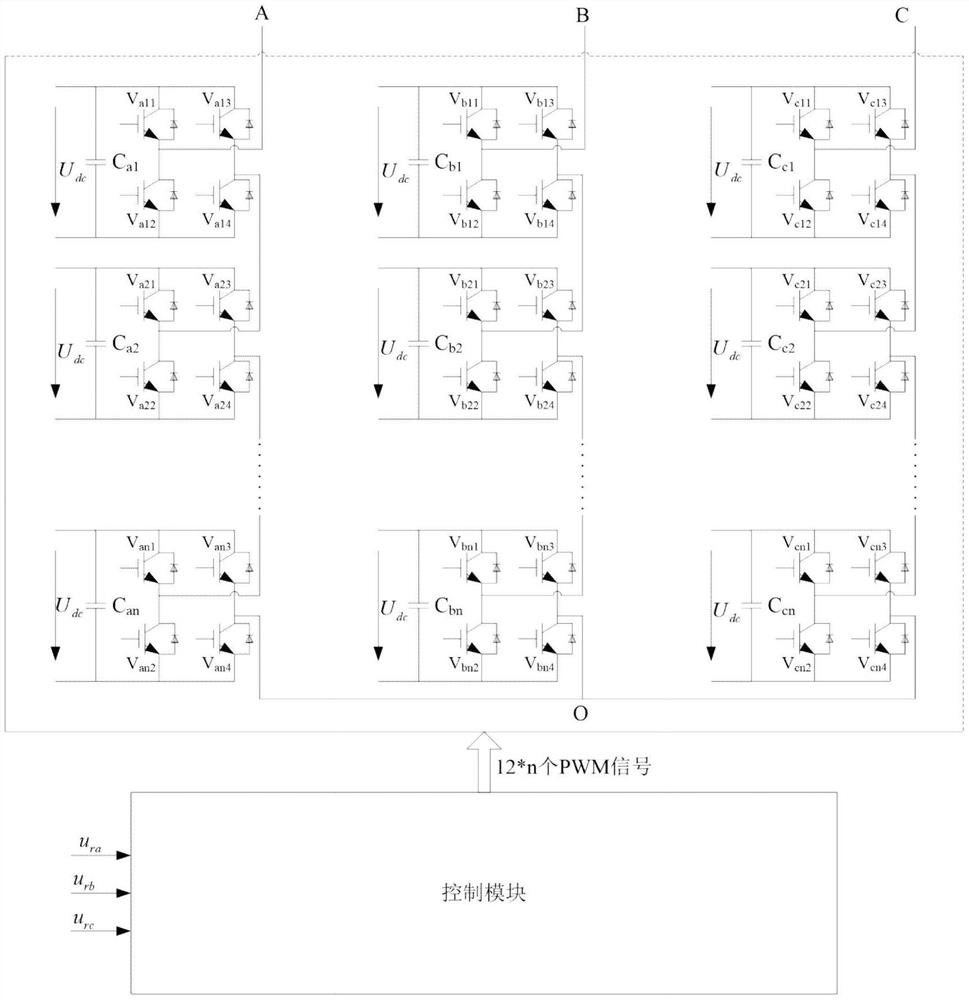
如附图1所示一种基于零序电压最小空间矢量调制控制的级联多电平变换器结构图,所述的级联多电平变换器主电路每一相由n个电压型单相全桥逆变器子模块串联组成,单相全桥逆变器子模块即H桥,每一个H桥由四个IGBT及反并联二极管组成,与H桥并联的电容表明子模块为电压型逆变,且所有子模块的输入电压都相等,用U
式中,m表示调制系数,0<m≤1,反映H桥输入直流电压的利用率,n表示每一相级联H桥单元数,ω表示参考信号角频率,t表示时间。
控制模块产生12*n路PWM脉冲信号以控制级联多电平变换器的运行;控制模块中执行的调制方法为基于零序电压最小空间矢量调制方法。
调制方法包括以下步骤,具体实施步骤框图如附图2所示:
步骤一:对三个相电压参考信号u
式中,α
式中int(*)为取整函数,确定距离参考矢量
步骤二:α'-β'坐标系上基本矢量
α和β表示基本矢量
步骤三:根据零序电压N最小的要求,构造约束函数:
N=a+b+c=0 (5)
步骤四:联立公式(4)和(5)得:
步骤五:判断(α
步骤六:确定三个基本矢量对应开关状态的切换顺序,采用五段算法实现空间矢量调制。
所述的步骤四中,计算公式(6)所得a,b,c可能不为整数,需要通过round 函数对a,b,c取整,round(*)表示对数值*进行四舍五入取整:
如果所得a',b',c'∈[±n,±(n-1),±(n-2),...,±2,±1,0],k=0;如果所得
将a',b',c'同时减去k得:
S(a”,b”,c”)即为基本矢量
所述的步骤五中可得到两种情况:
情况一:当(α
式中,t
根据公式(6)、(7)、(8)计算基本矢量
情况二:当(α
式中,t
根据公式(6)、(7)、(8)计算基本矢量
所述的步骤六中,首先计算基本矢量对应的冗余开关状态个数g:
g=2n-max{a,b,c}+min{a,b,c} (11)
根据公式(11)可计算三个基本矢量
g
g
g
g
根据开关状态切换最优的原则(即冗余开关状态多的基本矢量优先且前后切换的开关状态只改变±1个单位电平),判断开关状态切换顺序,有以下两种情况;
情况1:当(α
当mod((g
当mod((g
根据计算所得结果,存在六种切换顺序,采用五段算法实现,合成参考矢量的开关状态切换顺序为:
①计算所得切换顺序为S
②计算所得切换顺序为S
③计算所得切换顺序为S
④计算所得切换顺序为S
⑤计算所得切换顺序为S
⑥计算所得切换顺序为S
情况2:当(α
当mod((g
当mod((g
根据计算所得结果,存在六种切换顺序,采用五段算法实现,合成参考矢量的开关状态切换顺序为:
①计算所得切换顺序为S
②计算所得切换顺序为S
③计算所得切换顺序为S
④计算所得切换顺序为S
⑤计算所得切换顺序为S
⑥计算所得切换顺序为S
与现有的空间矢量调制技术相比,本发明的上述方案,可以直接得到基本矢量对应的所有开关状态中零序电压最小的开关状态,只需要通过比较和简单的四则运算就可以实现算法,避免了复杂的三角函数和无理数计算,易于计算机实现。
附图说明
图1基于零序电压最小空间矢量调制控制的级联多电平变换器结构图;
图2实施步骤框图;
图3参考电压矢量定位原理图;
图4实施例开关状态切换及时间分配图;
图5实施例仿真输出相电压和线电压波形图;图5(a)和图5(b)分别为相电压和线电压的波形图,图中u
具体实施方式
下面以4级9电平变换器为例(即n=4,三相输出电压的电平数 a,b,c∈[±4,±3,±2,±1,0]),H桥子模块输入直流电压U
设t=5.2ms时采样,调制方法包括以下步骤:
步骤一:对三个相电压参考信号u
距离参考矢量
步骤二:(α
步骤三:根据公式(10)计算基本矢量
计算得:t
步骤四:根据公式(6)计算基本矢量
步骤五:根据公式(7)对a
由于a
S
步骤六:根据公式(11)计算基本矢量
g
g
g
步骤七:根据开关状态切换最优的原则(即冗余开关状态多的基本矢量优先且前后切换的开关状态只改变1个单位电平),判断开关状态切换顺序:
由于本实施例所选择的参考矢量满足 (α
计算所得切换顺序为S
为了跟踪参考矢量的变化,重复以上工作即可。
本实施例所得其中一个相电压和一个线电压仿真波形如图5所示。
- 基于零序电压最小空间矢量调制控制的级联多电平变换器
- 一种级联多电平变换器零序电压最小空间矢量调制方法