一种一电二驱的同步驱动装置
文献发布时间:2023-06-19 11:02:01
技术领域
本申请涉及驱动器的领域,尤其是涉及一种一电二驱的同步驱动装置。
背景技术
随着社会不断发展与进步,目前电动床、电动沙发以及医疗床均具备可升降的功能以满足使用者的各种需求。其中电动床、电动沙发以及医疗床均设置有线性驱动器,线性驱动器包括动力源与伸缩机构,伸缩机构包括丝杆、丝杆螺母、推杆支架以及伸缩杆,通过电机等动力源驱动丝杆转动,使丝杆螺母带动伸缩杆升降,因此驱动器在电动家具使用过程中发挥了重要的作用。在需要两个驱动器同步升降的工况下,通常在两个线性驱动器中均设置带有霍尔的驱动器马达,当两个驱动器同时工作时,控制盒内的CPU不断检测驱动器马达的霍尔信号并计数。当两者霍尔数值不一致时,降低霍尔值较大的电机的速度以使得两个电机的霍尔值相同,最终达到两个电机同步的功能,从而使电动床稳定同步升降。
针对上述中的相关技术,发明人认为存在以下缺陷:控制两线性驱动器的同步升降需要通过控制盒中的软件和硬件来控制两个电机的同步性,从而导致成本较高。
发明内容
为了降低成本,本申请提供一种一电二驱的同步驱动装置。
本申请提供的一种一电二驱的同步驱动装置,采用如下的技术方案:
一种一电二驱的同步驱动装置,包括:
两壳体,所述壳体呈中空设置,且所述壳体连接有伸缩机构,所述伸缩机构包括丝杆,丝杆的一端伸入壳体内;
两传动机构,所述传动机构包括转动连接于壳体内的第一传动件,丝杆固定连接有第二传动件,所述第一传动件与第二传动件为相互啮合的交错齿轮;
一联动杆,所述联动杆设置于两壳体之间,所述联动杆的两端分别连接于第一传动件;
一驱动机构,所述驱动机构作用于联动杆,并用于驱动联动杆转动。
通过采用上述技术方案,驱动机构驱动联动杆转动,联动杆带动第一传动件转动,由于第二传动件与第一传动件啮合连接,从而第一传动件驱动第二传动件转动,使丝杆绕其自身轴线方向转动,进而联动杆两端的传动机构同步驱动丝杆转动,从而使伸缩机构沿线性方向移动,两个伸缩机构能够同步升降,保持一致性的同时,还降低了成本。
可选的,所述驱动机构包括转动电机,所述转动电机输出轴固定连接有第一啮合件,所述壳体内转动连接有第二啮合件,所述第二啮合件啮合于第一啮合件,所述壳体内转动连接有第三啮合件,所述第三啮合件固定连接于第二啮合件,所述第三啮合件与第一传动件啮合。
通过采用上述技术方案,转动电机驱动第一啮合件转动,第二啮合件带动第三啮合件转动,第三啮合件带动第一传动件转动,使联动杆能够同步驱动另一端连接的丝杆转动,从而使两个伸缩机构同升同降。
可选的,所述第一传动件包括端面齿和斜齿,所述斜齿转动连接于壳体内,所述端面齿与斜齿固定连接,所述斜齿啮合于第三啮合件,所述端面齿啮合于第二传动件。
通过采用上述技术方案,转动电机驱动第三啮合件转动,第三啮合件带动斜齿转动,斜齿带动端面齿转动,使联动杆带动两端的丝杆同步转动,使两个伸缩机构同步升降。
可选的,所述斜齿与第一传动件均开设有非圆孔,所述联动杆穿设卡接于非圆孔内,且所述联动杆的截面与非圆孔相适配。
通过采用上述技术方案,使联动杆在转动过程中更加稳定的带动两个丝杆同步转动。
可选的,所述联动杆包括分别连接于两个壳体的连接杆,两所述连接杆之间连接有弹性联轴器。
通过采用上述技术方案,将两个连接杆通过连接弹性联轴器,使两连接杆保持同心,使两连接杆在转动过程中保持一致性,且弹性联轴器使两连接杆在转动过程中减少震动,连接杆更加稳定的驱动两个伸缩机构升降。
可选的,所述联动杆包括连接于两壳体之间的刚性杆或柔性杆。
通过采用上述技术方案,利用软轴刚性小且具有弹性的特点,使软轴在转动过程中,减少震动,提高同步性,使两个伸缩机构更加稳定的同升同降。
可选的,所述壳体连接有套设于转动电机输出端的制动件,所述制动件是弹性的,所述制动件用于为转动电机输出端提供与转动电机输出端转动方向相反的制动力。
通过采用上述技术方案,在关闭转动电机时,转动电机输出轴由于惯性力,仍然会存在继续转动的趋势,此时制动件提供与转动电机输出端转动方向相反的制动力,从而缩短转动电机输出端的制动时间,使第一啮合件能够稳定停止。
可选的,所述驱动机构包括驱动电机,所述驱动电机输出轴固定连接有第一驱动件,所述联动杆固定连接有第二驱动件,所述第二驱动件啮合于第一驱动件。
通过采用上述技术方案,通过开启驱动电机,使驱动电机带动第一驱动件转动,由于第二驱动件啮合于第一驱动件,从而第二驱动件同步带动连接杆转动。
可选的,所述第一驱动件与第二驱动件为交错齿轮。
可选的,所述第一啮合件与第二啮合件为交错齿轮。
附图说明
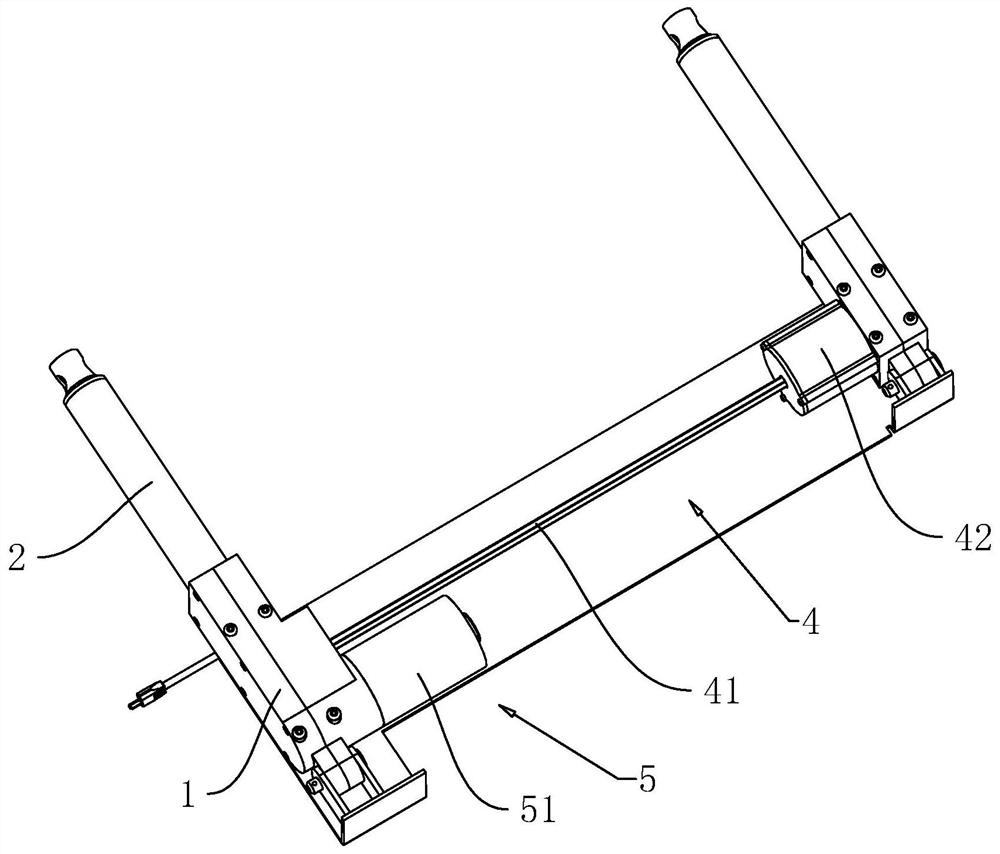
图1是本申请实施例一的整体结构示意图。
图2是本申请实施例一中壳体内部的结构示意图。
图3是本申请实施例一中驱动机构的结构示意图。
图4是图3中A部分的局部放大示意图。
图5是本申请实施例一中第一传动件另一实施方式的结构示意图。
图6是本申请实施例一中制动件的结构示意图。
图7是本申请实施例二中驱动机构的结构示意图。
附图标记说明:1、壳体;2、伸缩机构;3、传动机构;4、联动杆;5、驱动机构;31、第一传动件;311、端面齿;312、斜齿;32、第二传动件;51、转动电机;52、第一啮合件;53、转轴;54、第二啮合件;55、第三啮合件;56、非圆孔;41、连接杆;42、弹性联轴器;6、容纳槽;7、制动件;71、环形基体;72、中央开口;73、连接部;74、制动部;8、驱动电机;81、安装壳;82、第一驱动件;83、第二驱动件。
具体实施方式
以下结合附图1-7对本申请作进一步详细说明。
线性驱动器包括动力源与伸缩机构,伸缩机构包括丝杆、丝杆螺母、推杆支架以及伸缩杆,通过电机等动力源驱动丝杆转动,使丝杆螺母带动伸缩杆升降。
本申请实施例公开一种一电二驱的同步驱动装置。
实施例一:
参照图1与图2,一种一电二驱的同步驱动装置包括两个呈中空的壳体1,两个壳体1与设置在电动家具上的安装板之间可以采用螺丝钉固定连接,在一些实施例中,也可以是采用圆柱销铰接连接。壳体1固定连接有伸缩机构2,伸缩机构2可以是通过螺钉与壳体1固定,也可以是通过在壳体1侧壁开槽,将伸缩机构2卡接固定于壳体1。伸缩机构2包括丝杆,丝杆的一端伸入壳体1内腔。两壳体1内均设置有传动机构3,且传动机构3连接于丝杆的一端。在两个壳体1之间连接有联动杆4,联动杆4的两端分别连接于传动机构3,在其中一壳体1上固定有驱动机构5,驱动机构5连接于联动杆4的一端并用于驱动联动杆4转动。
当驱动机构5驱动联动杆4转动时,联动杆4能够带动两个壳体1中的传动机构3同步转动,从而通过传动机构3带动两个伸缩机构2同步升降。由此只要在任意一个伸缩机构2内固定有一个开关架,开关架设置有两个微动开关,微动开关用于控制伸缩机构2的最长伸出量与最小伸出量。
参照图2与图3,以其中一组传动机构3为例进行讲解,传动机构3包括转动连接于壳体1内的第一传动件31,第一传动件31通过轴承转动支撑于壳体1,丝杆伸入壳体1内的一端固定连接有第二传动件32,第一传动件31与第二传动件32为相互啮合的交错齿轮,第二传动件32与第一传动件31的轴线相交,优选的,第二传动件32与第一传动件31的轴线垂直,且联动杆4的两端分别连接于两个壳体1内的第一传动件31。
为了限制第二传动件32沿丝杆轴向移动,在本实施例中,将第二传动件32采用铆接的方式与丝杆进行连接;在其他的一些实施例中,第二传动件32也可以通过在端面打螺丝的方式与丝杆进行连接,从而使第二传动件32与丝杆连接成一个整体。
参照图4,驱动机构5包括固定连接于其中一个壳体1的转动电机51,转动电机51是通过螺钉与壳体1进行固定,转动电机51位于壳体1背离伸缩机构2的一端,转动电机51输出轴固定连接有第一啮合件52。壳体1内固定连接有转轴53,转轴53位于转动电机51与联动杆4之间,转轴53转动连接有第二啮合件54,且第二啮合件54啮合于第一啮合件52。
参照图4,在本实施例中,第一啮合件52为蜗杆,且第二啮合件54为蜗杆斜齿轮,由于蜗杆齿是连续不断的螺旋齿,从而使蜗杆与蜗杆斜齿轮啮合时逐渐进入啮合及逐渐退出啮合,同时由于啮合的齿对较多,故冲击载荷小,传动平稳,且噪声低。在其他的一些实施例中,第一啮合件52与第二啮合件54也可以是交错齿轮,例如锥齿轮、斜齿轮。
参照图4,为了驱动联动杆4转动,转轴53转动连接有第三啮合件55,且为了当第二啮合件54转动时,为了使第三啮合件55同步转动。在本实施例中,第三啮合件55与第二啮合件54通过开模注塑集成一体的结构进行连接;在其他的一些实施例中,第三啮合件55与第二啮合件54可以是两个独立的结构,并将第三啮合件55与第二啮合件54固定连接,从而使第二啮合件54能够带动第三啮合件55同步转动。
为了使第二啮合件54与第三啮合件55能够稳定转动,在本实施例中,第二啮合件54、第三啮合件55与转轴53的连接方式可以是在转轴53的两端均套设有垫片,使第二啮合件54与第三啮合件55的端部贴合于垫片,从而使第二啮合件54与第三啮合件55在轴向上得到了限位;在其他的一些实施例中,也可以是在第二啮合件54与第三啮合件55的两端增加台阶,台阶上装有轴承,使轴承的外圈与壳体1固定,从而限制了第二啮合件54、第三啮合件55的轴向移动。
参照图2与图4,在两组第一传动件31中,其中用于连接转动电机51的壳体1中的第一传动件31包括端面齿311和斜齿312,而另一个壳体1中的第一传动件31仅包含端面齿311。其中斜齿312转动连接于壳体1内,联动杆4的一端连接于斜齿312,斜齿312啮合于第三啮合件55,第三啮合件55与斜齿312为斜齿轮,端面齿311啮合于第二传动件32。
为了使斜齿312能够同步带动端面齿311转动,在本实施例中,端面齿311与斜齿312是通过开模注塑集成一体的结构进行连接,并在端面齿311与斜齿312的两端通过轴承与壳体进行支撑;在其他的一些实施例中,端面齿311与斜齿312可以是两个独立的结构,并将端面齿311与斜齿312固定连接。端面齿311与斜齿312均开设有非圆孔56,联动杆4的截面与非圆孔56相适配,且使联动杆4穿设连接于非圆孔56内,在其他实施例中,联动杆4也可以与第一传动件31一体连接或通过紧固件连接。
其次转轴53呈倾斜设置,由此可防止第二啮合件54与端面齿311产生干涉,同时使第三啮合件55与斜齿312能够更好的啮合。由于转轴53倾斜,使第三啮合件55也呈倾斜,使第三啮合件55与斜齿312啮合时,会对斜齿312施加朝向靠近端面齿311方向的作用力,从而端面齿311与第二传动件32啮合转动时,能够使联动杆4更加稳定平衡。
参照图5,在其他的一些实施例中,第一传动件31、第二传动件32以及第三啮合件55均为斜齿轮,且第一传动件31与第二传动件32和第三啮合件55同时啮合,使传递的力更大且平稳,第一传动件31与第二传动件32可以由塑料制成,进而使装置更加轻量化,且降低了成本。
参照图4,在本实施例中,当第三啮合件55带动斜齿312转动时,联动杆4转动,联动杆4带动两端的端面齿311同步转动,另一个壳体1中的第二传动件32同步转动,从而使两个伸缩机构2能够同步升降。
当一个壳体1中的第二传动件32采用端面齿轮时,则另一个壳体1中的第二传动件32同样为减速比和齿数相同的端面齿轮;在其他的一些实施例中,当一个壳体1中的第二传动件32为斜齿轮时,则另一个壳体1中的第二传动件32同样为减速比和齿数相同的斜齿轮。
参照图2,在本实施例中,联动杆4包括分别连接于两个壳体1的连接杆41,两个连接杆41背离壳体1的一端共同连接有弹性联轴器42,连接杆41背离弹性联轴器42的一端连接于斜齿312,且弹性联轴器42采用梅花弹性联轴器,从而使两个连接杆41的同心度更高,且降低了噪音;在其他的一些实施例中,联动杆4也可以是一根刚性杆;在另外的一些实施例中,联动杆4还可以是一根柔性杆,优选为软轴。
参照图6,为了使电机能够更加稳定的刹车,在本实施例中,壳体1用于连接转动电机51的侧壁开设有容纳槽6,容纳槽6截面呈圆形状设置,容纳槽6内固定有制动件7,转动电机51输出轴穿过容纳槽6穿设并伸入壳体1内,制动件7能够套设于转动电机51输出轴。
参照图6,制动件7包括固定于容纳槽6内壁的环形基体71,环形基体71呈环形状设置。环形基体71内壁一体连接有至少三个制动部件,且三个制动部件沿环形基体71周向等距排列设置,使三个制动部件能够构成可以供转动电机51输出轴穿设的中央开口72,且三个制动部件均抵接于转动电机51输出轴。
参照图6,制动部件包括一体连接于环形基体71内壁的两连接部73,连接部73沿环形基体71的径向设置,且在两连接部73靠近中央开口72的一端一体连接有制动部74,制动部74朝向转动电机51输出轴的一侧呈弧形设置,从而使制动部74能贴合于转动电机51输出轴的侧壁。其次制动部件具有弹性,可以采用耐热塑料,例如PEEK,从而通过制动部74与转动电机51输出轴的摩擦,使制动部74提供与转动电机51输出端转动方向相反的制动力。
本实施例一的实施原理为:在使用时,将两个壳体同时连接于电动家具的固定端,将两个伸缩机构连接于电动家具的伸缩端或转动端,两个伸缩机构保持平行且分列于电动家具的两侧,通过控制伸缩机构的伸缩,实现对电动家具的驱动,提高驱动的稳定性,当然本申请不仅限于应用于电动家具领域,在智能办公设备(如升降桌)、电动医疗设备(如电动医疗床)中同样适用。当需要使两个伸缩机构2同步升降时,可通过开启转动电机51,转动电机51输出轴带动第一啮合件52和第二啮合件54转动,第二啮合件54带动第三啮合件55转动,由于斜齿312啮合于第三啮合件55,从而带动连接于斜齿312的连接杆41转动,使一个连接杆41通过弹性联轴器42带动另一个连接杆41同步转动,进而两个连接杆41同步驱动两个端面齿311转动,端面齿311带动第二传动件32转动,从而丝杆绕其自身轴线方向转动,带动伸缩机构2升降,从而仅通过一个转动电机51就能够同步驱动两个伸缩机构2升降,降低了成本,且同步系数更高,使电动家具动作更稳定。
实施例二:
参照图7,本实施例与实施例一的区别之处在于:安装在电动家具上的安装板通过螺钉连接有安装壳81,安装壳81呈中空设置,且驱动机构5包括固定连接于安装壳81的驱动电机8,在本实施例中,驱动电机8与安装壳81通过螺钉固定连接。驱动电机8输出轴伸入安装壳81内腔并连接有第一驱动件82,联动杆4固定连接有第二驱动件83,第二驱动件83与第一驱动件82啮合。
在本实施例中,第一驱动件82为蜗杆,第二驱动件83为蜗杆斜齿轮;在其他的一些实施例中,第一驱动件82与第二驱动件83还可以是两个相互啮合的锥齿轮。
实施例三:
本实施例与实施例一的区别之处在于:转轴53转动连接于壳体1,且转轴53的两端连接轴承,使轴承外圈与壳体1固定,第二啮合件54与第三啮合件55均固定于转轴53,从而第一啮合件52带动第二啮合件54转动时,第三啮合件55同步转动,进而使联动杆4能够同步驱动两个伸缩机构2升降。
实施例四:
本实施例与实施例一的区别之处在于:端面齿311还可以替换为蜗杆,且第二传动件32可以为蜗杆斜齿轮,蜗杆与蜗杆斜齿轮啮合。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种一电二驱的同步驱动装置
- 一种车辆电驱EMF防护装置及电驱系统