旋转电机的转子的角位置的检测装置
文献发布时间:2023-06-19 11:14:36
本发明的领域是用于机动车辆的旋转电机领域,旋转电机例如为交流发电机、交流发电机起动器、可逆转电机或电动机。
特别地,这种类型的旋转电机包括至少一个定子和放置在该定子内部的转子,并且该转子可相对于定子转动。
例如,在使用这种类型的旋转电机作为电动机的情况下,特别是为了在正确的时刻将电流注入定子,精确地知道转子相对于定子的角位置是很重要的。为此,已知为旋转电机配备至少一个转子位置传感器和磁性编码器,磁性编码器在下文中称为磁性目标,位置传感器与定子是一体化的,并且磁性目标直接连接到转子上或固定到与转子接触的滚珠轴承的轴环上。
为了能够在良好的条件下进行使用,例如,通过旋转电机的电子控制装置进行使用,由角位置传感器(磁性目标在其前方移动)产生的信号必须具有尽可能正弦的波形。事实上,由不同阶谐波的存在引起的这种信号的干扰也必须尽可能地受到限制。然而,机动车辆的发展引发了旋转电机的产生,旋转电机的转子的直径越来越大的,和/或,必须将旋转电机的转子放置在专用于位置传感器的、空间有限的环境中。这导致了磁性目标的制造限制的增加,特别是在该目标的磁性连续性方面,并且增加了由磁性目标和角位置传感器形成的组件相关的电磁开发难度。特别地,由位置传感器产生的信号受到不可接受的谐波水平的影响。对于包含少量磁极的小直径目标,也会出现这个问题,这往往会产生具有高水平谐波失真的信号。
本发明的目的是提出一种用于检测大直径转子或包括少量磁极的小直径转子的位置的组件,该组件制造简单且便宜,易于安装在设计为使机动车辆运动的旋转电机中,并且允许产生表示所寻求的角位置的质量信号。在这种情况下,“质量信号”是指没有峰值限制的信号,并且具有尽可能低的谐波水平。
为此,本发明的主题是一种用于检测旋转电机的转子的角位置的装置,该旋转电机设计为使机动车辆运动,转子被安装成在旋转电机的定子中旋转地可移动,该用于检测转子的角位置的装置至少包括:
-角位置传感器,其与旋转电机的固定部分一体化,例如与定子、轴承或逆变器一体化;
-磁性目标,其可围绕回转轴线旋转移动,并以转子的旋转轴线为中心设置,
其特征在于,检测装置包括至少一个设置在金属目标和角位置传感器之间的金属壁。
根据本发明的一个方面,壁由磁性材料制成。
根据本发明的一个方面,壁由铁磁材料制成。例如,壁由钢制成。又例如,壁由符合美国钢铁协会(American Iron and Steel Institute,AISI)标准或同等标准的碳钢1008制成。
根据本发明的一个方面,壁由铁磁性材料制成。例如,壁由铁镍合金或铁钴合金制成。
根据本发明的一个方面,壁是永磁体。根据本发明的一个方面,壁是包括哈尔巴赫(Halbach)型磁化的磁体。哈尔巴赫型磁体可以是单件的。哈尔巴赫型磁体可以包括多个相互连接的元件,每个元件具有特定的磁化方向。例如,壁是包括磁化的磁体,其磁化方向遵循由磁条的一连串南北磁极产生的磁场线的轨迹。
在根据本发明的装置中,角位置传感器例如是霍尔效应型传感器。有利的是,根据本发明的检测装置包括多个角位置传感器。
根据本发明的检测装置的磁性目标有利地但不排他地具有大致圆柱形的一般形状。更具体地,根据本发明的检测装置的磁性目标有利地在垂直于其回转轴线的平面上具有大致环形的形状。在这种情况下,“大致”必须理解为意指本文件中提到的尺寸和方向考虑了制造、装配和磨损的公差。
为了允许检测所寻找的角位置,在配备有根据本发明的检测装置的旋转电机内,磁性目标具有磁性配置,该磁性配置代表与其连接的转子的磁性配置。有利的是,根据本发明的装置的磁性目标因此具有围绕其回转轴线交替布置的一连串北磁极和南磁极,并且这一连串磁极代表旋转电机的转子具有的一连串磁极。
有利的是,根据本发明的检测装置的磁性目标被接收在具有回转轴线的目标保持器中,该回转轴线基本上与磁性目标的先前定义的回转轴线相结合,目标保持器可围绕其回转轴线旋转移动。在配备有根据本发明的检测装置的旋转电机内,该轴线基本上与旋转电机的转子的旋转轴线相结合。更具体地说,在这种类型的旋转电机中,目标保持器有利地直接或通过一个或多个部件连接到上述转子,使得目标保持器与其支撑的磁性目标一起、通过转子的旋转而绕其旋转轴线旋转。换句话说,在配备有根据本发明的检测装置的旋转电机内,磁性目标和接收磁性目标的目标保持器与旋转电机的转子旋转连接并且与转子同轴。根据本发明的一个方面,目标保持器由金属或任何其他合适的材料制成,例如塑料。根据本发明的一个方面,目标保持器由磁性材料制成。根据本发明的一个方面,目标保持器由钢制成。例如,目标保持器由根据美国标准的AISI 1008钢制成。根据本发明的一个方面,目标保持器由非磁性材料制成。例如,目标保持器由塑料或铝制成。在最后一种情况下,可以在目标保持器和磁性目标之间插入钢条。
放置位置传感器,以使得当磁性目标围绕其回转轴线旋转时,围绕其回转轴线测得的该磁性目标的所有角区域都连续在该传感器或这些传感器的前方经过。换句话说,在根据本发明的检测装置中,角位置传感器相对于围绕自己回转轴线旋转的磁性目标处于固定的相对位置。在配备有根据本发明的检测组件的旋转电机中,角位置传感器有利地直接或通过一个或多个部件连接到旋转电机的定子,使得当该旋转电机的转子绕其回转轴线旋转时,磁性目标的环形表面在该传感器或这些传感器的前方经过。
在根据本发明的检测装置中,金属壁设置在磁性目标和角位置传感器之间。作为前述设置的结果,前述金属壁因此位于角位置传感器与在传感器前方旋转经过的磁性目标的表面之间形成的气隙中。
本发明的主题还在于一种用于检测旋转电机的转子的角位置的装置,该旋转电机设计为使机动车辆运动,转子被安装成在旋转电机的定子中旋转地可移动,该用于检测转子的角位置的装置至少包括:
-角位置传感器,其与旋转电机的固定部分一体化,例如与定子、轴承或逆变器一体化;
-磁性目标,包括一连串北磁极和南磁极,该目标可围绕回转轴线旋转移动,并以转子的旋转轴线为中心设置;
-气隙,形成在角位置传感器和磁性目标的表面之间,
其特征在于,该检测装置包括至少一个设置在气隙中的金属壁,以便产生与北-南磁极的交替一致的磁短路,从而在装置的旋转部分的旋转期间改变由传感器检测到的磁感应的时间形式。
磁壁设置在气隙中,以便产生与北-南磁极的交替一致的磁短路,从而改变传感器读取的磁感应。金属壁改变了传感器处的磁感应值。
根据本发明,前述金属壁有利地连接到目标保持器,使得在磁性目标和目标保持器的旋转运动中,金属壁同时在角位置传感器的前方移动。根据不同的实施例,金属壁可以是先前限定的目标保持器的一部分,或者它可以例如通过焊接或任何其他机械方式被添加到该目标保持器上。根据本发明的一个方面,金属壁与在检测装置的旋转中可移动的部分是一体化的。根据本发明的一个方面,金属壁与目标保持器是一体化的。根据本发明的一个方面,金属壁是从金属目标保持器获得的。
作为前述设置的结果,前述金属壁修改了由先前定义的位置传感器检测到的磁场,并因此修改了该传感器或这些传感器产生的信号。
根据不同的制造模式,可以通过向模具中注入填充有磁性颗粒的聚合物树脂或弹性体材料来构造磁性目标,磁性颗粒例如是铁氧体颗粒或稀土颗粒。作为非限制性实例,用于制造磁性目标的聚合物材料可以是热塑性树脂,例如聚酰胺(PA)或聚苯硫醚(PPS)。更一般地,有利地选择用于制造磁性目标的材料,以使其符合由环境和旋转电机的操作提出的、在高温下的刚性和强度约束。根据不同的实施例,磁性目标可以被硫化、注入成型或通过粘合到目标保持器的表面上来添加。
根据本发明的一个实施例,目标保持器具有基本上环形的形状,其沿着包含目标保持器的回转轴线的平面的横截面具有“U”型的一般形状。根据第一种类型的配置,磁性目标具有圆柱形的一部分的形状,其与目标保持器的回转轴线同轴,放置在前述“U”型的垂直分支的内部或外部:将磁性目标放置在前述U”型的垂直分支的内部的配置被指定为是内部径向配置,而将磁性目标放置在前述“U”型的垂直分支的外部的配置被指定为是外部径向配置。
在第一内部径向配置中,磁性目标被放置在由“U”型前述形状限定的目标保持器的容器内部,抵靠着限定具有最大直径的圆柱体的“U”型的垂直分支,并且角位置传感器放置在磁性目标和回转轴线之间,该回转轴线对于磁性目标和目标保持器是公共的。换句话说,在该第一内部径向配置中,角位置传感器被放置在目标保持器的回转轴线和目标之间。
在第二内部径向配置中,磁性目标被放置在由“U”型前述形状限定的目标保持器的容器内部,抵靠着限定具有最小直径的圆柱体的“U”型的垂直分支,并且角位置传感器被放置在由目标限定的圆柱形体积的外部。换句话说,在该第二内部径向配置中,磁性目标被放置在角位置传感器和目标保持器的回转轴线之间。
在第一外部径向配置中,磁性目标被放置在由“U”型前述形状限定的目标保持器的容器的外部,抵靠着限定具有最大直径的圆柱体的“U”型的垂直分支,并且角位置传感器被径向布置在由磁性目标限定的基本圆柱形的体积的外部。换句话说,在该第一外部径向配置中,磁性目标被放置在角位置传感器和目标保持器的回转轴线之间。
在第二外部径向配置中,磁性目标被放置在由“U”型前述形状限定的目标保持器的容器的外部,抵靠着限定具有最小直径的圆柱体的“U”型的垂直分支,并且角位置传感器被径向布置在由磁性目标限定的基本圆柱形的体积的内部。换句话说,在该第二外部径向配置中,角位置传感器被放置在目标保持器的回转轴线和目标之间。
应当注意的是,在内部径向配置或外部径向配置中,角位置传感器面向磁性目标的轴向壁放置,即:面向平行于磁性目标的回转轴线延伸的壁。
在内部径向配置和外部径向配置中,放置在磁性目标和角位置传感器之间的先前限定的金属壁因此有利地面向磁性目标的轴向壁放置,并且其在气隙中相对于磁性目标的回转轴线在径向方向上延伸。
根据第二种类型的配置,在下文中称为轴向配置,磁性目标抵靠着前述“U”型的水平分支放置,在由该“U”型限定的接收容器的内部。在这种轴向配置中,角位置传感器面向磁性目标的环形表面放置。
在该轴向配置中,放置在磁性目标和角位置传感器之间的金属壁有利地从磁性目标的环形表面沿基本轴向方向延伸,即:该方向基本上平行于磁性目标的回转轴线。
根据本发明的一个实施例,目标保持器具有基本上环形的形状,其在包含目标保持器的回转轴线的平面上的横截面具有“L”(或倒“L”)型的一般形状。例如,目标保持器不具有前述“U”型形状的内部垂直分支。例如,目标保持器不具有前述“U”型形状的外部垂直分支。
因此,本发明适用于根据本发明的检测装置内的磁性目标和角位置传感器的所有类型的相对配置,只要满足:当目标围绕其回转轴线旋转时,角位置传感器相对于磁性目标处于固定的相对位置,并且先前限定的金属壁插置在磁性目标和角位置传感器(该目标旋转经过该角位置传感器前方)之间。
有利的是,本发明可以具有一个或多个单独或组合的下列特征:
-根据本发明的检测装置包括与磁性目标一样多的金属壁,磁性目标包括北磁极和南磁极的交替。在这种情况下,应该理解的是,金属壁是分布在目标保持器上的离散元件。换句话说,金属壁是一连串不同元件的形式,这些元件围绕磁性目标的回转轴线成角度地分布,并且通过围绕该回转轴线测得的角空间成对地彼此分开;
-围绕磁性目标的回转轴线测得的至少两个角空间是相同的,这两个角空间使围绕该回转轴线连续布置的两个金属壁分开。有利地,使围绕磁性目标的回转轴线连续布置的两个金属壁分开的所有角空间是相同的,即:金属壁围绕磁性目标的回转轴线成角度规则分布;
-至少一个金属壁围绕磁性目标的回转轴线成角度地布置,与磁性目标的北-南磁极的交替一致。相关的金属壁以直线为中心设置,该直线连接磁性目标的回转轴线和目标的北-南磁极交替的区域。有利地,所有金属壁围绕磁性目标的回转轴线成角度地布置,与目标的北-南磁极的交替一致;
-所有金属壁都位于与磁性目标的回转轴线等距离的径向位置。换句话说,金属壁相对于磁性目标的回转轴线同心布置。因此,金属壁是不连续圆柱体的一部分的形状,与磁性目标的回转轴线同轴。不连续圆柱体的这一部分由两个端部边缘界定;
-至少两个金属壁,有利的是所有金属壁在相同的角扇区上延伸。换句话说,根据本发明的检测装置的金属壁的围绕磁性目标的旋转轴线测得的尺寸是相同的;
-金属壁的开口角度和磁性目标的极差(pole step)之间的比率在0.01和0.5之间。在这种情况下,“金属壁的开口角度”是指相对于磁性目标的回转轴线测得的角度,由相关金属壁先前定义的两个端部边缘界定。此外,在这种情况下,“磁性目标的极差”是指相对于磁性目标的回转轴线测得的角度,由围绕回转轴线连续成角度布置的北-南磁极的两个交替界定,即:磁性目标的北-南磁极的两个连续交替之间的夹角。该比率优选在0.025和0.35之间;
-有利的是,北磁极延伸所抵靠的磁性目标的周界部分都是相同的。南磁极延伸所抵靠的磁性目标的周界部分也是相同的;
-因此,由金属壁的端部边缘界定的角度在磁性目标的磁极延伸所抵靠的角扇区的前方是较小的。换句话说,金属壁在围绕磁性目标的回转轴线测得的尺寸上延伸,该尺寸在磁性目标的磁极延伸所抵靠的周界部分的前方是较小的。金属壁的该较小的性质是根据上面给出的比率确定的;
-面向传感器检测到的极弧的长度和磁性目标的半径之间的比率在0.2和3之间。在这种情况下,“面向传感器检测到的极弧”表示围绕磁性目标的回转轴线测得的角度,该角度包含在两个连续的金属壁之间,并且其中角位置传感器检测磁性目标的磁场。在这种情况下,前述极弧的长度因此表示由前述极弧限定的磁性目标的周界部分的尺寸,该尺寸是围绕磁性目标的回转轴线测得的。此外,在这种情况下要考虑的磁性目标的半径是磁性目标面向位置传感器的表面上的半径。例如,在磁性目标和位置传感器的相对内部径向配置的情况下,前述半径表示磁性目标的内部半径。该比率优选在0.2和0.6之间。
-根据本发明的检测装置的气隙与金属壁厚度之间的比率在2和14之间。优选地,该比率在2和7之间。在这种情况下,检测装置的气隙表示磁性目标的磁性表面和角位置传感器之间的尺寸。对于前面描述的相对径向配置,上述气隙是在相对于磁性目标的回转轴线成径向的方向上测量的。对于相对轴向配置,上述气隙是在轴向方向上测量的,即:基本平行于磁性目标的回转轴线。在这种情况下,金属壁的厚度表示该壁在磁性目标经过其前方的角位置传感器的方向上测得的尺寸。对于前述的相对径向配置,前述厚度因此是在相对于磁性目标的回转轴线成径向的方向上测得的。对于前述的相对轴向配置,上述厚度是在轴向方向上测得的,即:基本平行于磁性目标的回转轴线。有利的是,金属壁都具有基本相同的厚度。参考前述内容,检测装置的气隙和金属壁的厚度之间的预先限定的比率因此代表了在磁性目标和角位置传感器之间限定的磁性空间中金属壁占据的体积。因此,由本发明提供的值中,必须理解的是,在磁性目标与角位置传感器之间限定的磁空间内,金属壁占据的体积介于很小(对于前述比率的值为2的情况)和非常小(对于前述比率的值为7或14的情况)之间;
-至少一个金属壁安装在磁性目标的目标保持器上;
-至少一个金属壁与磁性目标的目标保持器是一体形成的。有利的是,所有金属壁都是与磁性目标的目标保持器一体形成的。目标保持器例如由同轴的内圆筒和外圆筒形成,内圆筒和外圆筒分别形成平行于目标保持器的回转轴线的内壁和外壁,并且其各自的回转轴线与前述回转轴线结合。内壁和外壁通过基本上垂直于目标保持器的回转轴线的基部相互连接。根据一个特别有利的实施例,金属壁是通过切割和弯曲用于形成磁性目标的目标保持器的金属板的部分而形成的。例如,从目标保持器基部的一部分获得至少一个壁。在另一个例子中,从目标保持器的外壁获得至少一个壁。根据替代实施例,金属壁可以通过切割和弯曲金属板来产生,该金属板例如通过焊接被添加到磁性目标的目标保持器上。
根据本发明的一个方面,检测装置包括多个金属壁,这些金属壁通过上冠部和/或下冠部彼此连接。例如,金属壁由钢制成,冠部由塑料制成。例如,至少一个冠部包覆成型在多个金属壁上。由壁、上冠部和/或下冠部形成的组件被称为透空部件。
根据本发明的一个方面,多个壁、上冠部和/或下冠部由相同的材料获得,并且形成单件式组件。例如,该透空部件是由单件钢制成的。
根据本发明的一个方面,该透空部件通过胶合而固定在目标保持器上。
根据本发明的一个方面,该透空部件被焊接在目标保持器中。
根据本发明的另一方面,该透空部件通过销系统固定在目标保持器中。例如,该透空部件包括销,并且目标保持器包括可以接收该销的互补孔。在另一个例子中,目标保持器包括销,并且该透空部件包括可以接收该销的孔。
通过实施上述单独或组合的特征,本发明很好地实现了它所提出的目标,即:首先,构造一种允许精确和可靠地检测大直径转子或包括少量极的小直径转子的角位置的装置;其次,构造一种这种类型的检测装置,该检测装置制造简单、可再现且便宜;最后,构造一种这种类型的检测装置,该检测装置易于合并在机动车辆中。
本发明还延伸到一种旋转电机,其至少包括:
-定子;
-转子,其安装成可相对于定子旋转移动;
-如前所述的用于检测转子的角位置的装置。
根据本发明的一个方面,如前所述的用于检测转子的角位置的装置包括与旋转电机的定子一体化的角位置传感器,以及可围绕回转轴线旋转移动的磁性目标,该磁性目标以转子的旋转轴线为中心设置。
有利地但非排他地,根据本发明的旋转电机被配置为作为发电机和能够使机动车辆运动的电动机来操作。
有利的是,根据本发明的旋转电机可以具有一个或多个单独或组合的下列特征:
-用于检测转子的角位置的装置包括与转子中包括的北-南磁极的交替一样多的金属壁;
-转子的外径在60毫米和270毫米之间。
本发明的其他特征、细节和优势将通过阅读以下结合附图通过指示方式提供的说明而变得更加清楚可见,附图中:
图1a和1b是根据本发明的旋转电机的总体示意图。图1a是组装好的这种类型的旋转电机的总体示意图,而图1b是这种类型的旋转电机的分解示意图;
图2是根据本发明的检测装置的一部分的俯视示意图,示出了由于根据本发明的金属壁的存在而导致的磁场变化;
图3a、3b和3c示出了根据本发明实施例的金属壁;
图4a、4b和4c示出了根据本发明其他实施例的金属壁;
图5是磁性目标及其目标保持器的一部分的俯视示意图,示出了根据本发明的检测装置的不同特征值;
图6a、6b和6c是示意性示出根据本发明的检测装置的特征值对由根据本发明的检测装置的位置传感器检测到的信号的谐波的影响的曲线;
图7示出了磁性目标和角位置传感器的相对轴向配置;
图8a、8b和8c示出了根据本发明另一实施例的金属壁;
图9示出了根据本发明另一实施例的金属壁。
首先,应该注意的是,尽管附图详细描述了本发明的实施方式,但是应当理解,如果适用的话,所述附图可以用来更好地限定本发明。还应当注意,在所有附图中,相同的元件由相同的附图标记表示。
参照图1a和1b,根据本发明的旋转电机600具体包括定子2和转子1,转子1具有旋转轴线100,安装成在定子2中可旋转移动。有利地,定子2具有一般的回转形式,其轴线200在制造、组装和磨损的公差范围内基本上与转子1的旋转轴线100结合。有利地,定子2由电磁线圈20的组件构成,电磁线圈20在图1a和1b中示意性地示出。定子2被容纳在壳体6中,定子2通过适当的固定装置(图中未示出)连接到壳体6上。有利地,壳体6被孔口60刺穿,孔口60被构造成允许转子1的轴通过。有利的是,这种类型的旋转电机600可以用作电动机,该电动机设计成使机动车辆运动。在这种类型的情况下,根据本发明的旋转电机600还包括用于检测转子1在定子2内的角位置的装置500,特别是为了得以确定需要将电流注入定子2的时刻以及转子的旋转速度。
根据本发明的检测装置500尤其包括至少一个角位置传感器3和一个磁性目标4,该磁性目标4可围绕回转轴线400旋转移动并且以转子1的旋转轴线100为中心设置。其结果是,在根据本发明的旋转电机600内,转子1的旋转轴线100和磁性目标4的回转轴线400基本上结合在一起,处于制造、组装和磨损的公差范围内。更具体地,在旋转电机600内,磁性目标4机械连接到转子1,并且通过转子1围绕其旋转轴线100的旋转而围绕其回转轴线400旋转。
根据通过图1b更具体示出的实施例,根据本发明的检测装置500包括由传感器支架31支撑的三个角位置传感器3。角位置传感器3例如是霍尔效应传感器。
在图1b中示意性示出的磁性目标4具有带有回转轴线400的直圆柱体的一部分的一般形式。更具体地,在沿着垂直于其回转轴线400的平面的横截面中,磁性目标4具有以前述回转轴线400为中心的基本环形的形状。磁性目标4包括内壁40和外壁41,内壁40的位置最靠近回转轴线400,外壁41最远离回转轴线400,二者均如图2中所示。从电磁角度来看,围绕其回转轴线400,磁性目标4具有北磁极和南磁极的交替序列。更具体地说,在旋转电机600内,磁性目标4具有代表旋转电机600的转子1的电磁结构。
磁性目标4例如由填充有磁性颗粒(例如铁氧体或稀土的颗粒)的聚合物树脂(例如诸如聚酰胺(PA)或聚苯硫醚(PPS)的热塑性树脂)或弹性体材料构成。更一般地,有利地选择用于制造磁性目标的材料,以使其符合由环境和配备有根据本发明的检测装置500的旋转电机的操作所提出的、在高温下的刚性和强度约束。
有利的是,磁性目标4容纳在金属目标保持器45中,金属目标保持器45的回转轴线450在制造和磨损的公差范围内基本上与磁性目标4的回转轴线400结合。目标保持器例如由符合美国钢铁协会(American Iron and Steel Institute,AISI)标准的1008碳钢制成。磁性目标4例如通过在目标保持器45的壁上沉积构成其的材料条而构造。根据其他制造模式,磁性目标4例如可以通过模内注射而构造为独特的元件形式,然后例如通过胶合与目标保持器45组装在一起。
根据其他制造模式,目标保持器45由非磁性材料制成,例如塑料或铝。在这种情况下,可以在目标保持器45和磁性目标4之间插置钢条,以便在磁性目标4的外表面41上更好地引导磁场线,从而最大化角位置传感器3经受的感应水平。由此获得的信噪比是令人满意的。有利的是,目标保持器45具有大致环形的形状,其在包含目标保持器45的回转轴线450的平面上的横截面具有大致“U”型的形状,其对称轴与目标保持器45的回转轴线450相结合。因此,该目标保持器45界定了大致环形的接收容器451,其回转轴线与目标保持器45的回转轴线450相结合。
在根据本发明的检测装置500中,角位置传感器3相对于磁性目标4固定,磁性目标4自身通过转子1的旋转而绕其回转轴线400旋转。其结果是,在磁性目标4的旋转运动中,围绕回转轴线400限定的、磁性目标4的角区域相继地面向角位置传感器3而经过该角位置传感器3。传感器测量由磁性目标4的特定磁性配置产生的磁场变化,该特定磁性配置是先前定义的,因此允许检测所寻求的角位置。有利地,在旋转电机600内,角位置传感器3机械连接到定子2。
根据本发明,检测装置500包括设置在磁性目标4和角位置传感器3之间的至少一个金属壁5。这更具体地由图2示出,图2从上方示意性地示出了根据本发明的检测装置500的磁性目标4和目标保持器45的一部分。在这种情况下,金属壁5由铁磁材料制成,即:符合美国钢铁协会AISI标准的1008碳钢。金属壁5也可以是包括哈尔巴赫型磁化的永磁体,其磁化方向遵循由磁条的一连串北-南磁极产生的磁场线的轨迹。金属壁5也可以由铁磁性材料制成,例如铁镍合金或铁钴合金。
图2示意性地示出了磁性目标4的一部分,该部分在围绕磁性目标4的回转轴线400测得的角度410上延伸,界定了磁性目标4的周界的一部分411,在该部分411上延伸有一连串的北磁极和南磁极,即:磁性目标4的北磁极和南磁极的交替。
图2还示意性地示出了回转轴线400、450和角位置传感器3,回转轴线400、450对于磁性目标4和目标保持器45是公共的。
参考图2,磁性目标4的外壁41抵靠目标保持器45的外壁453的内表面而被接收在前述接收容器451的内部:角位置传感器3被布置在相对于回转轴线400、450成径向的方向上,在前述回转轴线400、450和磁性目标4的内壁40之间。根据磁性目标4和位置传感器3的这种被指定为第一内部径向配置的相对配置,角位置传感器3因此被设置成面向磁性目标4的表面,该表面基本上平行于其回转轴线400。
参照磁性目标4和角位置传感器3的这种相对配置,金属壁5、5a、5b布置在形成于磁性目标4的内壁40和角位置传感器3之间的气隙44中。在这种情况下,气隙44是在相对于磁性目标4的回转轴线400成径向的方向上测量的。金属壁5通过其在上述气隙44中的存在,改变了磁性目标4的磁场,并因此改变了由角位置传感器3检测到的磁场。图2以短划线示意性地示出了由金属目标4的电磁配置产生的场线700,以点划线示出了由金属壁5的存在产生的场线710。
如图2中清楚示出的,多个不同的金属壁5布置在磁性目标4和角位置传感器3之间。更具体地,金属壁5基本上布置在围绕磁性目标4的回转轴线400测量的每个角位置,在该角位置,磁性目标4的北-南磁极发生变化。换句话说,围绕磁性目标4的回转轴线400相继布置的两个金属壁5a、5b以围绕磁性目标的回转轴线400测量的角度420彼此分开,界定磁性目标4的周界的一部分421,磁性目标4的北磁极或南磁极抵靠该部分延伸。因此,根据本发明的检测装置500包括与磁性目标4包含的北-南磁极的交替一样多的金属壁5。
有利地,磁性目标4的北-南磁极规则地设置在其外围:其结果是,金属壁5围绕磁性目标4的回转轴线400成角度地规则地布置。
如图2所示,金属壁5从磁性目标4延伸,即:金属壁5机械连接到磁性目标4,使得它们通过磁性目标4围绕其回转轴线400的旋转而同时旋转。金属壁5与检测装置500的可旋转移动的部分合并。金属壁5与目标保持器45合并。
图3a、3b和3c示意性地示出了金属壁5的实施例。图3a是根据本发明的检测装置500的目标保持器45的一部分的透视示意图,图3b是图3a所示的目标保持器45的一部分和磁性目标4的相应部分的透视示意图,并且图3c是图3a和3b所示的磁性目标4和目标保持器45的该部分在包含回转轴线400、450的平面上的横截面的示意图,该回转轴线400、450对于磁性目标4和目标保持器45是公共的。
这些图分别代表三个不同的金属壁6a、6b、6c。在这些图中还示意性地示出了回转轴线400、450,其对于磁性目标4和目标保持器45是公共的。
如图3a、3b和3c所示,目标保持器45例如通过在压力机中冲压而由薄金属板形成,并且金属壁5a、5b、5c是从该金属板切割和弯曲而得到的舌状物的形式。
更具体地说,在这种情况下,目标保持器45是一个环,其每个角部分在包含上述回转轴线450的平面上的横截面呈“U”型。更具体地说,目标保持器45包括基本平行于前述回转轴线450的内壁452、基本平行于回转轴线450的外壁453以及基本垂直于回转轴线450并在前述内壁452和外壁453之间延伸的基部454。内壁452和外壁453是同心的,并且以回转轴线450为中心,而且内壁452比外壁453更靠近回转轴线450。换句话说,目标保持器45由同轴的内圆筒和外圆筒形成,其壁452、453分别平行于目标保持器45的回转轴线450,并且其各自的回转轴线与前述回转轴线450结合,通过基本垂直于目标保持器45的回转轴线450的基部454彼此连接。
根据图3a至3c更具体示出的实施例,内壁452在回转轴线450的方向上的尺寸大于外壁453根据相同回转轴线450的尺寸,但并非总是如此。如前所述,目标保持器45的内壁452、外壁453和基部454一起限定了容器451,该容器451被构造成容纳磁性目标4,如图3b和3c所示。
根据图3a至3c更具体示出的实施例,金属壁5a、5b、5c分别由布置在目标保持器45的基部454中的切口55a、55b、55c形成。更具体地,根据该实施例,切口55a、55b、55c分别具有基本上矩形的形状,其较大侧面面向相对于目标保持器45的回转轴线450成径向的方向,其较小侧面基本上平行于内壁452和先前限定的外壁,并且金属壁5a、5b、5c通过在基本上平行于前述回转轴线450的方向上弯曲由切口55a、55b、55c释放的金属板元件而产生。更具体地说,在这种情况下,切口55a、55b、55c具有基本上矩形的形状,该形状在它们的较大侧面上是开口的,并且仅在它们其中的一个较小侧面上是开口的,切口55a、55b、55c的被释放的较小侧面456a、456b、456c分别位于目标保持器45的内壁454的侧面上,并且金属壁分别由切口55a、55b、55c的与前述被释放的较小侧面456a、456b、456c相对的较小侧面形成。
换句话说,在这种情况下,金属壁5a、5b、5c从内表面455延伸,该内表面455面向目标保持器45的外壁453的回转轴线450,并且这些金属壁分别通过边缘56a、56b、56c附接到目标保持器45的外壁453,该边缘大致平行于切口55a、55b、55c的被释放的较小侧面456a、456b、456c,并且与前述较小侧面456a、456b、456c相对。
作为前述设置的结果,金属壁5a、5b、5c各自围绕目标保持器45的回转轴线450、由第一端部边缘550a和第二端部边缘550b界定,第一端部边缘550a和第二端部边缘550b平行于前述切口55a、55b、55c的较大侧面。
同样由于前述原因,金属壁5a、5b、5c各自在先前限定的接收容器451内分别界定了体积457a、457b、457c,这可以在图3c中看到。如该图所示,体积457a、457b、457c包含在先前限定的接收容器451中。此外,作为前述设置的结果,金属壁5a、5b、5c一起形成不连续圆柱体的一部分,其回转轴线在制造和组装公差范围内基本上与回转轴线400、450相结合,该回转轴线400、450对于磁性目标4和目标保持器45是公共的,并且其不连续壁由检测装置500的不同金属壁形成。
根据图3b和3c更具体示出的实施例,磁性目标4抵靠目标保持器45的外壁453被接收,使得如图3c所示的磁性目标4的外壁41抵靠前述外壁453的先前限定的内表面455放置。根据该实施例,磁性目标4包括基本上平行于先前限定的回转轴线400的主壁42,其抵靠前述外壁453放置,并且磁性目标4还包括基本上垂直于前述回转轴线400的第一辅助部分430和第二辅助部分431。在这种情况下,第一辅助部分430抵靠目标保持器45的基部454放置,并且在这种情况下,第二辅助部分431覆盖目标保持器45的外壁453的上脊458。换句话说,磁性目标4的第二辅助部分431覆盖目标保持器45的外壁453的厚度,该厚度在相对于先前限定的回转轴线400、450的径向方向上测得。
作为前述设置的结果,磁性目标4被容纳在先前限定的分布于目标保持器45外围的不同接收体积457a、457b、457c中。同样由于前述原因,金属壁5a、5b、5c从磁性目标4沿相对于其回转轴线400基本径向的方向延伸,然后沿基本轴向的方向延伸,该基本轴向的方向平行于磁性目标4的回转轴线400。
根据图4a和4b更具体示出的实施例,金属壁5a、5b、5c分别由外壁453的金属板元件459构成。如图4a所示,金属板元件459通过将目标保持器45的外壁453的上脊458切割成段而构成。更具体地,根据该实施例,金属板元件459具有基本上矩形的形状,其最大侧面面向相对于目标保持器45的回转轴线450成轴向的方向。金属壁5a、5b、5c通过在基本垂直于前述回转轴线450的方向上根据箭头460弯曲金属板元件459而构成。更具体地说,在这个例子中,为了允许磁性目标4在目标保持器45中包覆成型,金属板元件459经受第一次冲压操作,形成在图4a中可以清楚看到的缩进部461。然后,金属板元件459经受第二次冲压操作,使得舌状物弯曲并形成回弯部462,这可以在图4b中看到。可选地,金属壁5例如通过焊接被添加并固定到外壁453上,如图4c所示。在这些实施例中,可以预先通过朝着目标保持器45的内部冲压目标保持器45的基部454的小金属板元件而形成保持舌状物(retentiontougues)(未示出)。一旦金属板元件459已经被弯曲或焊接以形成金属壁5,保持舌状物将在目标保持器45的基部454的方向上向后折叠,以将金属壁5保持在其操作位置。
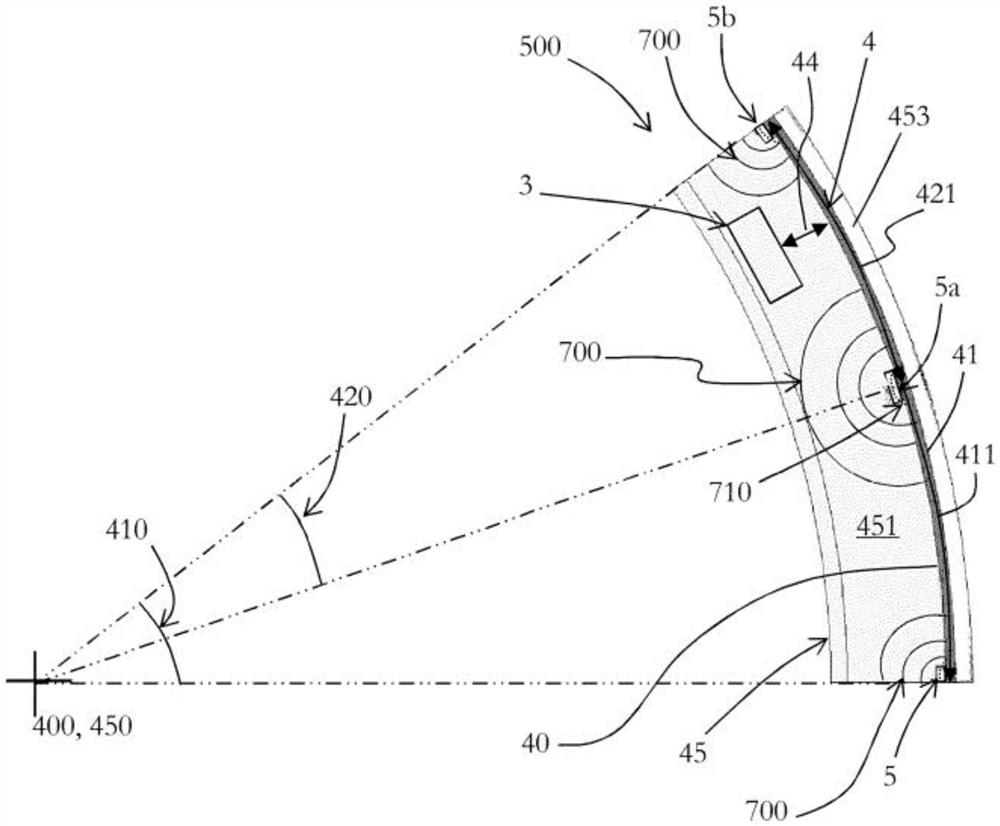
在俯视图中,图5示出了根据类似于图3a至3c所示实施例的实施例的磁性目标4和目标保持器45的一部分。因此,图5再次示出了目标保持器45、其内壁452、其外壁453、其基部454以及通常由附图标记5表示的三个金属壁,这三个金属壁是通过在平行于目标保持器45的回转轴线450的方向上弯曲金属板元件而形成的,该金属板元件通过设置在目标保持器45的基部454中的通常由附图标记55表示的切口而被释放。图5中还示意性地表示了角位置传感器3。
更具体地,图5示出了根据本发明的检测装置500的特定数量的特征值。
参照图5,金属壁5的开口角度50被定义为是相对于目标保持器45的回转轴线450测得的角度50,其界定相关金属壁5。换句话说,开口角度50被限定在以下两条直线之间:第一条直线径向连接目标保持器45的回转轴线450和相关金属壁5的第一端部边缘550a,第二条直线径向连接目标保持器45的回转轴线450和同一金属壁5的第二端部边缘550b。
金属目标4的极差46也被定义为是围绕金属目标4的回转轴线400测得的角度46,该角度将该磁性目标4的北-南磁极的两个相继交替分开。作为前述设置的结果,前述的极差46是在制造和装配公差范围内将两个金属壁5分开的角度,这两个金属壁5围绕先前限定的回转轴线400、450相继布置。如图5所示,上述极差46等于围绕目标保持器45的回转轴线450测得的角度,该角度将相继布置在目标保持器45外围上的两个金属壁5的中心部分分开,在这种情况下,金属壁5的该中心部分是参照围绕目标保持器45的回转轴线450测得的相关金属壁5的尺寸而限定的。
参照图5,还定义了面向传感器3检测到的极弧47。围绕磁性目标4的回转轴线400测得的极弧47是包含在两个连续金属壁之间的角度,并且其中角位置传感器检测磁性目标的磁场。从极弧47开始,极弧47的长度48被定义为是围绕磁性目标4的回转轴线400测得的尺寸,由极弧47界定的角扇区相对于该回转轴线延伸。换句话说,极弧47的长度48是磁性目标4的周界的一部分,包含在两个相继的壁之间,并且角位置传感器3沿着该部分检测同一磁性目标4的磁场。通过在极间产生磁短路,壁改变了传感器在操作期间检测到的磁感应的时间形式。
图5还示出了先前限定的气隙44,即:在角位置传感器3和面向该位置传感器的磁性目标4的表面之间的尺寸,其是在相对于磁性目标4的回转轴线400的径向方向上测得的。应当注意的是,在根据本发明的检测装置500包括多个角位置传感器3的情况下,传感器有利地布置在距磁性目标4的相等距离处,使得前述气隙44恒定。
图5还示出了磁性目标4的半径49。半径49是在磁性目标4的回转轴线400和其面向角位置传感器3的表面之间测得的。根据更具体地如图5所示的磁性目标4和角位置传感器3的相对配置,半径49是在先前限定的回转轴线400和磁性目标4的内壁40之间测得的。
最后,参照图5,定义了金属壁5的厚度51。在这种情况下,金属壁5的厚度51是相对于磁性目标4的回转轴线400在径向上测得的相关金属壁5的尺寸。
在根据本发明的检测装置500的电磁调节中,考虑了这些不同的值,尤其是它们的相对比例。
图6a、6b和6c示出了根据本发明的检测装置500的金属壁5的实施所产生的优点。X轴示出了金属壁的开口角度50和磁性目标的极差46之间的比率510。Y轴示出了占优势的谐波,以及由角位置传感器3检测到的径向磁感应的谐波失真水平,相关的磁性目标4旋转经过该角位置传感器3的前方。特别地,检查了分别被称为H3、H5和H7的(在这种情况下是通过谐波1或基波标准化的)谐波3、5和7。在这种情况下,被称为THD的“信号谐波失真水平”是指相对于基波值的谐波失真水平,通常被称为THD-f,它是信号质量的良好指标。
为检测装置500建立这三组曲线,检测装置500具有:
-相同的气隙尺寸44;
-相同直径(60毫米)的磁性目标;
-相同厚度的金属壁51。
因此,唯一变化的参数是目标的磁极对数。对于图6a,这个数字等于1,对于图6b,这个数字等于5,对于图6c,它等于12。
因此,图6a、6b和6c示出了比率510(以及金属壁的开口角度50)对占优势的谐波的影响,以及针对数量可变的磁极对检测到的径向磁感应的谐波失真水平。
对于为零的开口角度50,即:在没有任何金属壁5的情况下,检测装置是根据现有技术的装置。这种情况对应于比率510为零的情况。因此,在图6a中,可以在没有任何金属壁的情况下读取谐波H3、H5和H7的实际值,即:分别约为35%、20%和15%。人们发现,舌状物的存在通过使这些值下降而大大改善了信号。这同样适用于谐波失真的水平。因此,对于这种类型的检测装置,本发明使得能够显著改善转子的角位置的测量。
对于包含5个磁极对的目标,观察到相同的现象(图6b)。对于包括12个磁极对的目标,也观察到与本发明相关的改进(图6c),但在这种情况下,改进较小,即:在没有任何金属壁的情况下,谐波的值和谐波失真水平已经相当低(大约百分之一或更少)。在这种情况下,舌状物的存在是不太必要的。
还可以注意到,每个谐波相对于基值的相对水平在图6a中高于图6b中,并且在图6b中高于图6c中。因此,磁极对数越大,每个谐波相对于基值的相对水平就降低得越多。当磁极对数增加时,谐波失真水平THD也降低。
这种现象与以下事实相关,即:磁极对的数量增加得越多,极差46就减少得越多,并且磁极在气隙中生成的磁感应的形式就越趋向于纯正弦曲线。
当目标4的外径改变时,也可以观察到这种现象,因为该直径也影响极差46(此处未示出)的值。
换句话说,磁极对的数量和目标4的外径对金属壁5的效率有影响的原因在于:对于金属壁的开口角度50的给定值时,它们改变了壁的开口角度50和极差46之间的比率510。
此外,从图6a、6b和6c可以清楚地看出,不管所涉及的磁性目标4如何,比率510都存在一个先前定义的取值范围,对于该范围,检测到的所有谐波信号都是最小的或者接近它们的最小值。谐波H3、H5和H7的最小值以及谐波失真水平THD分别由以下参照物识别:图6a中的H3O、H5O、H7O、THDO;图6b中的H3O′、H5O′、H7O′、THDO′;以及图6c中的H3O″、H5O″、H7O″、THDO″。
因此,对于具有1个磁极对的目标,根据相关谐波,对于比率510,最佳范围PO位于0.10和0.35之间。对于包括5个磁极对的目标,最佳比率范围PO′位于0.06和0.22之间。最后,对于包括12个磁极对的目标,最佳比率范围P O″位于0.025和0.14之间。
因此,根据相关目标的特性,比率510的最佳取值范围基本上位于0.01和0.5之间,优选范围为0.025至0.35。换句话说,根据磁性目标4的尺寸和它所包括的磁极对的数量,当围绕相关磁性目标4的回转轴线400,金属壁5占据的壁的开口角度50是目标的极差46的1%至50%时,本发明可以将检测到的谐波减少到它们的最小值。因此,本发明实现了它所提出的另一个目标。
此外,还发现,并非所有谐波都以相同的比例受到影响。例如,对于5个磁极对(图6b),谐波H7相对于谐波H3和H5变得总体上可以忽略不计。类似地,对于12个磁极对,谐波H5和H7相对于谐波H3可以忽略不计。因此,比率510的取值将被选择以减少特定谐波,根据应用,这些谐波被认为比其他谐波更关键。
最后,比率510的最佳取值根据磁极对的数量和磁性目标的外径而变化,但也根据所寻求的谐波频谱而变化。
图中未示出的检测装置500的其他特征值使得有可能进一步优化由根据本发明的检测装置500的角位置传感器3产生的信号。
因此,前面定义的面向传感器3检测到的极弧47的长度48和磁性目标4的半径49之间的比率将有利地介于0.2和3之间,并且优选地在0.2和0.6之间。换句话说,当面向传感器3检测到的极弧47的长度在磁性目标4的半径49的20%到三倍之间时,磁性目标4围绕转子1的回转轴线400相对于定子2的角位置的检测将是最佳的。
最后,根据本发明的检测装置500的气隙44和至少一个金属壁5的厚度51之间的比率将有利地在2和14之间,优选地在2和7之间。换句话说,由根据本发明的检测装置500执行的角位置的检测对于相对于金属壁的厚度51较大的气隙44来说是最佳的。
应该注意的是,为上述比率指示的取值范围应该理解为也是从磁性目标4的尺寸的离差(dispersion)以及这些目标包含的北-南磁极对的数量的可变性中导出的。然而,在所有情况下,本发明使得有可能获得优化的检测信号,因此实现了它已设定的目标。
通过实施刚刚描述的装置,本发明因此允许以增加的精度检测旋转电机600的转子1的角位置,特别是在大直径(例如大约270毫米)转子1或具有少量磁极对(例如1或5个磁极对)的小直径(例如60毫米)转子1的情况下。通过实施这些手段,本发明在检测大直径转子1的角位置方面具有特别有利但非排他性的应用。
然而,刚刚描述的本发明并不限于专门描述和说明的装置和配置,它也适用于任何等同的装置或配置以及这些装置或配置的任何组合。
特别地,磁性目标4和角位置传感器3可以根据任何其他配置来布置,例如第二内部径向配置,或者根据外部径向配置来布置,或者也可根据轴向配置来布置。
例如,在图中未示出的第一外部径向配置中,磁性目标4的内壁40抵靠先前限定的接收容器451的外壁453的外表面来容纳:磁性目标4因此位于前述接收容器451的外部,并且根据相对于磁性目标4的回转轴线400成径向的方向,其位于接收容器451的外壁453和角位置传感器3之间。与相对内部径向配置的情况一样,角位置传感器3因此面向磁性目标4的表面放置,该表面基本上平行于磁性目标的回转轴线400。
在图7所示的磁性目标4和角位置传感器3的相对轴向配置中,磁性目标4有利地具有抵靠目标保持器45的基部454的内表面放置的穿孔盘的形式,并且角位置传感器3在平行于磁性目标4的回转轴线400的方向上布置,面向该环的表面,垂直于前述公共回转轴线400、450。在这种情况下,在横截面上,目标保持器具有倒“L”形状。换句话说,它没有内壁452(或垂直内部分支)。
图8a、8b和8c示出了根据本发明的金属壁的另一个实施例。图8a更具体地示出了钢板条85,根据本发明的壁由该钢板条85构成。如图8b所示,通过激光切割、冲压或通过水射流切割在该钢板条85中形成窗口81。在这个阶段,金属板条包括所谓的上冠部82和所谓的下冠部83,以及金属壁5。钢板条85还包括形成销84的附加切口88。在该实施例中,销84形成在金属壁5的延伸部中,但是布置可以不同。如图8c所示,这样切出的金属板条然后被弯曲,并且其两端86、87被彼此焊接,从而形成单件的透空部件8。这种类型的透空部件8可以在销84上固定到目标保持器45中,销84插入目标保持器45的基部454中设置的互补孔中。单件的透空部件8也可不需要包括销84,并且它可以通过将下冠部83胶合或焊接到目标保持器45的基部454上而固定。图9示出了透空部件8的另一个实施例。在这种情况下,金属壁5通过上冠部82和下冠部83而彼此连接。更具体地,每个金属壁5包括两个纵向端51和52,称为纵向上端51和纵向下端52。上冠部82将金属壁5的纵向上端51相互连接。下冠部83将金属壁5的纵向下端52相互连接。上冠部82包覆成型在金属壁5的纵向上端51上。下冠部83包覆成型在金属壁5的纵向下端52上。然后,由上冠部82、下冠部83和金属壁5如此形成的透空部件8被胶合到目标保持器45中。
对于图8c和9所示的实施例,单个冠部的存在,即:上冠部82或下冠部83的存在足以很好地实施本发明。此外,先前关于图1至图6描述的所有内容都适用于图8c和图9中描述的实施例,即:根据该实施方式,金属壁5是由透空部件8获得的。
因此,本发明适用于磁性目标4和角位置传感器的任何相对配置,以及角位置传感器3的任何数量、类型或配置,只要传感器相对于通过旋转电机600的转子1的旋转而旋转的磁性目标4固定,并且只要先前描述的金属壁5布置在角位置传感器3和与其相对经过的磁性目标的表面之间形成的气隙44中。
- 旋转电机的转子的角位置的检测装置
- 装备有用于转子角位置的传感器的保持板的旋转电机