一种基于AGV移动机器人的高精度定位方法及系统
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于计算机网络领域,涉及AGV自动取片技术,具体是一种基于AGV 移动机器人的高精度定位方法及系统。
背景技术
随着物联网的发展,玻璃深加工行业自动化控制的需求不断增多,原片仓储系统逐渐实现了全流程无人作业,并在取片阶段采用AGV进行作业。AGV控制系统可长时间无监督运行,在复杂的生产环境中对不同情况匹配不同的调控参数系数,即能使小车控制更加稳定安全。
现有的AGV自动取片流程无法完全脱离人工手动辅助,在行走小车进行取片时需要手动辅助将原片一端抬上输送皮带,才能保证行走小车能够正常进行取片操作。
公告号为CN111115146A的发明专利揭示了一种基于AGV小车自动传输的花篮缓存站,该基于AGV小车自动传输的花篮缓存站,在工作位的上游设置等待位,AGV小车将空的花篮搬运至等待位,这样AGV小车可以去进行其他的相关操作,只要工作位腾空,等待位上的托盘自动移动到工作位上,进行上下料,上下料完成之后,工作位上的托盘自动移动到缓存位上,一旦检测到缓存位上有托盘,AGV小车立即过来将工艺后的花篮搬运至下一工序,等待位、工作位和缓存位与地面之间形成可供装有花篮的AGV小车通过的运输通道,等待位传输线和缓存位传输线高度可调,以便于与AGV小车对接,运输通道的高度大于AGV 加上花篮总高度,这样AGV满花篮也可以通过该缓存站,运输通道的设置,可以保证空的AGV小车和满载的AGV小车均可以在底部通过,不需要在缓存站的外部设置AGV小车通道,大大减少了AGV小车运行所占空的空间;但是该基于 AGV小车自动传输的花篮缓存站在上料和卸料的过程中都需要人工手动辅助进行,自动化程度不高,无法完全解放生产力。
公告号为CN208136076U的实用新型专利揭示了3D盖板玻璃全过程整合式加工系统,通过将3D玻璃盖板加工中的多个不同工艺的加工设备有机的整合到一个系统中,提高了资源的利用率和加工的系统性,并且通过AGV小车在加工设备之间进行盖板玻璃的输送,为3D盖板玻璃的全自动加工创造了条件,同时避免了人工输送带来的低效率和大劳动强度,在提高整体加工效率的同时,降低人员成本;该3D盖板玻璃全过程整合式加工系统还存在的问题为在对玻璃盖板进行输送的过程中无法对玻璃的表面污垢和裂纹进行检测,无法对玻璃盖板的质量进行评估。
发明内容
本发明的目的在于提供一种基于AGV移动机器人的高精度定位方法及系统;
本发明需要解决的技术问题为:
(1)如何提供一种可以对原片进行种类划分以及质量检测的AGV定位方法及系统。
本发明的目的可以通过以下技术方案实现:
一种基于AGV移动机器人的高精度定位方法,包括以下步骤:
步骤S1:对玻璃原片按照厚度进行种类区分,对不同种类的玻璃原片进行分类并存放至对应的原片架;
步骤S2:获取所需原片种类,将所需原片种类的原片架标记为目标原片架,控制取片装置行走至目标原片架位置;
步骤S3:启动取片装置的驱动马达带动第二转辊顺时针转动,第二转辊通过取片皮带带动第一转辊转动,启动电动推杆伸出,使取片台一侧向下移动,通过倾斜的取片皮带对玻璃原片架进行取片,取片完成后控制电动推杆收缩并关闭驱动马达,原片架在取片皮带上水平放置;
步骤S4:控制取片装置行走至目标上片台位置,控制驱动马达带动第二转辊逆时针转动,启动电动推杆伸出,使取片台一侧向下移动,通过倾斜的取片皮带将原片架输送至上片台上。
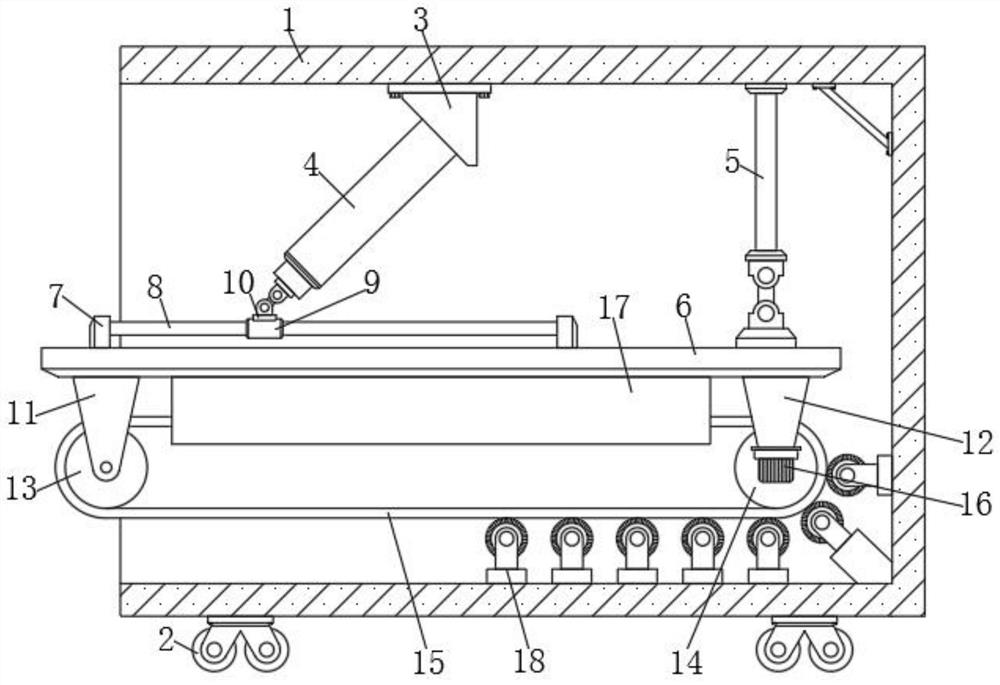
进一步地,S2中的取片装置包括取片箱体,所述取片箱体正面设有处理器,所述取片箱体底部设置有两组相对称的滚轮,所述取片箱体一侧的内壁呈镂空状态,所述取片箱体内顶壁固定安装有三脚架,所述三脚架的斜面固定安装有电动推杆,所述取片箱体内顶壁固定安装有两个相对称的竖杆,两个所述竖杆的底部之间设置有取片台,所述取片台顶部与竖杆底部相铰接,所述取片台顶面固定安装有两个相对称的安装块,两个所述安装块相靠近的侧面之间固定安装有滑杆,所述滑杆外表面活动连接有滑套,所述滑套外表面固定安装有连接块,所述连接块顶面与电动推杆的输出端相铰接,所述取片台底面固定安装有两个第一固定板与两个第二固定板,两个所述第一固定板相靠近的侧面之间通过转杆活动连接有第一转辊,两个所述第二固定板相靠近的侧面之间通过转杆活动连接有第二转辊,所述第一转辊与第二转辊的外表面之间传动连接有取片皮带,所述第二固定板的正面固定安装有驱动马达,所述驱动马达的输出端与转杆前端固定连接,所述取片台底面固定安装有两个相对称的挡料板,两个所述挡料板分别位于取片皮带的前后两侧,所述取片箱体内底壁设置有均匀分布的清洁机构;
所述处理器通信连接有定位模块、原片检测模块、质量检测模块、原片评级模块、控制模块以及存储模块,所述控制模块用于控制驱动马达、电动推杆的启闭。
进一步地,所述清洁机构包括安装座,所述安装座内部开设有凹槽,所述凹槽的两个内侧壁均开设有滑槽,所述滑槽内壁之间活动连接有滑块,两个所述滑块相靠近的侧面之间固定安装有连接板,所述连接板底面与凹槽内底壁之间固定安装有两个相对称的弹簧,所述连接板顶面固定安装有两个相对称的竖板,所述竖板顶部穿过凹槽内顶壁并延伸至安装座的外部,两个所述竖板相靠近的侧面之间活动连接有转轴,所述转轴外表面固定安装有清洁辊,所述清洁辊外表面固定安装有均匀分布的清洁毛刷。
进一步地,所述定位模块用于对取片箱体进行定位分析,具体的分析过程包括以下步骤:
步骤S1:对原片所在加工场地建立直角坐标系,将原片的位置在直角坐标系内进行标点,将原片标记为v,v=1,2,……,u,将原片的坐标标记为(Xv, Yv),以原片的坐标为圆心,R1为半径画圆,将获得的圆形区域标记为目标区域;
步骤S2:获取取片箱体的坐标值并将取片箱体的坐标值标记为(Xq,Yq),在取片箱体进入到目标区域之后,定位模块向处理器发送接近信号,处理器接收到接近信号后将接近信号发送至控制模块,控制模块接收到接近信号后关闭驱动马达;
所述原片检测模块用于对原片表面的污垢、灰尘进行检测,具体检测过程包括以下步骤:
X1:获取原片表面的图像信息,将原片表面的图像信息标记为对比图像DB,对对比图像DB进行图像预处理得到对比图像DB的平均灰度值,图像预处理包括图像增强、图像分割以及灰度变换;
X2:将对比图像DB平均分割成图像区域i,i=1,2,……,n,将每个图像区域的平均灰度值标记为HDi,通过存储模块获取到平均灰度阈值HDmax;当HDi ≥HDmax时,判定对应区域为污染区域;当HDi X3:获取污染区域的数量并将污染区域的数量标记为m,通过公式 X4:通过存储模块获取到污染系数阈值WRmax,当WR≥WRmax时,判定对应玻璃原片不合格,原片检测模块向处理器发送原片不合格信号;当WR 进一步地,所述质量检测模块用于对玻璃原片进行裂纹检测,所述质量检测模块包括采集单元、分析单元以及反馈单元,所述采集单元包括设置在取片台底面的超声波探头,所述超声波探头用于对原片表面进行裂纹检测并将检测结果发送至分析单元,检测结果包括裂纹数量以及裂纹深度分析单元接收到检测结果后对原片的质量进行分析,具体分析过程包括以下步骤: Z1:若检测结果中的裂纹数量为零,则判定玻璃原片没有质量问题,质量检测模块向处理器发送质量合格信号,质量检测终止;若检测结果中的裂纹数量不为零,则判定玻璃原片存在质量问题,对检测结果进行下一步处理,同时质量检测模块向处理器发送质量不合格信号; Z2:将裂纹数量标记为o,对o个裂纹的深度值进行求和取平均数得到o个裂纹的平均深度值SDp,将裂纹数量o与o个裂纹的平均深度值SDp发送至存储模块进行存储。 进一步地,所述原片评级模块用于根据原片检测结果与质量检测结果对原片进行评级; 当原片检测结果和质量检测结果均为合格时,判定原片评级结果为第一等级; 当原片检测结果和质量检测结果有且只有一个为合格时,判定原片评级结果为第二等级; 当原片检测结果与质量检测结果均为不合格时,判定原片评级结果为第三等级。 本发明的有益效果:本发明具备下述有益效果: 1、通过设置的电动推杆可以控制取片皮带的倾斜角度,将原片架一端悬空放置后,即可通过电动推杆控制取片皮带一端向下倾斜,同时启动驱动马达带动取片皮带运行,利用取片皮带表面与原片架悬空一端之间的静摩擦力对原片架进行取片操作,在取片完成后关闭驱动马达并启动电动推杆收缩,使原片架在取片皮带上水平放置,提高原片架在输送过程中的稳定性,在取片、卸片的过程完全脱离人工手动辅助,自动化程度高; 2、通过设置的原片检测模块可以对原片表面的污垢、灰尘进行检测分析,得到原片表面的污染系数WR,污染系数WR的数值越大,表示原片表面污染程度越高,原片表面的污垢与灰尘越多,通过对污染系数WR与污染系数阈值WRmax 进行对比可以对原片是否合格进行判断; 3、通过设置的质量检测模块可以对原片表面的裂纹进行检测分析,通过超声波探头对原片表面的裂纹进行检测,并通过分析模块对裂纹数量与裂纹深度值进行分析,对原片质量是否合格进行判断; 4、通过设置的原片评级模块可以根据原片检测结果与质量检测结果对原片进行评级,在原片进行输送的过程中对原片进行评级,可以对原片的后续使用进行规划。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。 图1为本发明取片箱体结构主视剖视图; 图2为本发明清洁机构结构主视剖视图。 图中:1、取片箱体;2、滚轮;3、三脚架;4、电动推杆;5、竖杆;6、取片台;7、安装块;8、滑杆;9、滑套;10、连接块;11、第一固定板;12、第二固定板;13、第一转辊;14、第二转辊;15、取片皮带;16、驱动马达; 17、挡料板;18、清洁机构;1801、安装座;1802、凹槽;1803、滑槽;1804、滑块;1805、连接板;1806、弹簧;1807、竖板;1808、转轴;1809、清洁辊; 1810、清洁毛刷。 具体实施方式 下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。 如图1-2所示,一种基于AGV移动机器人的高精度定位方法,包括以下步骤: 步骤S1:对玻璃原片按照厚度进行种类区分,对不同种类的玻璃原片进行分类并存放至对应的原片架; 步骤S2:获取所需原片种类,将所需原片种类的原片架标记为目标原片架,控制取片装置行走至目标原片架位置; 步骤S3:启动取片装置的驱动马达16带动第二转辊14顺时针转动,第二转辊14通过取片皮带15带动第一转辊13转动,启动电动推杆4伸出,使取片台6一侧向下移动,通过倾斜的取片皮带15对玻璃原片架进行取片,取片完成后控制电动推杆4收缩并关闭驱动马达16,原片架在取片皮带15上水平放置; 步骤S4:控制取片装置行走至目标上片台位置,控制驱动马达16带动第二转辊14逆时针转动,启动电动推杆4伸出,使取片台6一侧向下移动,通过倾斜的取片皮带15将原片架输送至上片台上。 其中,S2中的取片装置包括取片箱体1,所述取片箱体1正面设有处理器,所述取片箱体1底部设置有两组相对称的滚轮2,滚轮2后侧设置有驱动电机,驱动电机用于驱动滚轮2转动,使取片箱体1正常移动,所述取片箱体1一侧的内壁呈镂空状态,所述取片箱体1内顶壁固定安装有三脚架3,所述三脚架3 的斜面固定安装有电动推杆4,电动推杆4用于控制取片皮带15一端的高度,使取片皮带15呈倾斜状,利用取片皮带15与原片架悬空一端的静摩擦力进行取片操作,所述取片箱体1内顶壁固定安装有两个相对称的竖杆5,两个所述竖杆5的底部之间设置有取片台6,所述取片台6顶部与竖杆5底部相铰接,所述取片台6顶面固定安装有两个相对称的安装块7,两个所述安装块7相靠近的侧面之间固定安装有滑杆8,所述滑杆8外表面活动连接有滑套9,所述滑套9外表面固定安装有连接块10,所述连接块10顶面与电动推杆4的输出端相铰接,所述取片台6底面固定安装有两个第一固定板11与两个第二固定板12,两个所述第一固定板11相靠近的侧面之间通过转杆活动连接有第一转辊13,两个所述第二固定板12相靠近的侧面之间通过转杆活动连接有第二转辊14,所述第一转辊13与第二转辊14的外表面之间传动连接有取片皮带15,取片皮带15有第二转辊14驱动运行,取片皮带15运行时对原片架进行取片操作,所述第二固定板12的正面固定安装有驱动马达16,驱动马达16用于驱动第二转辊14转动,所述驱动马达16的输出端与转杆前端固定连接,所述取片台6底面固定安装有两个相对称的挡料板17,两个所述挡料板17分别位于取片皮带15的前后两侧,设置挡料板17是为了防止取片皮带15上的原片架从取片皮带15的前后两侧掉落,对输送过程中的原片架提供保护,所述取片箱体1内底壁设置有均匀分布的清洁机构18,清洁机构18用于对取片皮带15的表面进行清灰、清洁处理; 所述处理器通信连接有定位模块、原片检测模块、质量检测模块、原片评级模块、控制模块以及存储模块,所述控制模块用于控制驱动马达16、电动推杆4的启闭。 所述清洁机构18包括安装座1801,所述安装座1801内部开设有凹槽1802,所述凹槽1802的两个内侧壁均开设有滑槽1803,所述滑槽1803内壁之间活动连接有滑块1804,两个所述滑块1804相靠近的侧面之间固定安装有连接板 1805,所述连接板1805底面与凹槽1802内底壁之间固定安装有两个相对称的弹簧1806,弹簧1806的反作用力作用在连接板1805上,使得清洁刷毛始终能够紧贴取片皮带15的表面,同时在取片皮带15一端下移时,可以压缩弹簧1806,使对应连接板1805相对安装座1801位置下移,所述连接板1805顶面固定安装有两个相对称的竖板1807,所述竖板1807顶部穿过凹槽1802内顶壁并延伸至安装座1801的外部,两个所述竖板1807相靠近的侧面之间活动连接有转轴 1808,所述转轴1808外表面固定安装有清洁辊1809,所述清洁辊1809外表面固定安装有均匀分布的清洁毛刷1810。 所述定位模块用于对取片箱体进行定位分析,具体的分析过程包括以下步骤: 步骤S1:对原片所在加工场地建立直角坐标系,将原片的位置在直角坐标系内进行标点,将原片标记为v,v=1,2,……,u,将原片的坐标标记为(Xv, Yv),以原片的坐标为圆心,R1为半径画圆,将获得的圆形区域标记为目标区域; 步骤S2:获取取片箱体1的坐标值并将取片箱体1的坐标值标记为Xq,Yq,在取片箱体1进入到目标区域之后,定位模块向处理器发送接近信号,处理器接收到接近信号后将接近信号发送至控制模块,控制模块接收到接近信号后关闭驱动马达16; 所述原片检测模块用于对原片表面的污垢、灰尘进行检测,具体检测过程包括以下步骤: X1:获取原片表面的图像信息,将原片表面的图像信息标记为对比图像DB,对对比图像DB进行图像预处理得到对比图像DB的平均灰度值,图像预处理包括图像增强、图像分割以及灰度变换; X2:将对比图像DB平均分割成图像区域i,i=1,2,……,n,将每个图像区域的平均灰度值标记为HDi,通过存储模块获取到平均灰度阈值HDmax;当HDi ≥HDmax时,判定对应区域为污染区域;当HDi X3:获取污染区域的数量并将污染区域的数量标记为m,通过公式 X4:通过存储模块获取到污染系数阈值WRmax,当WR≥WRmax时,判定对应玻璃原片不合格,原片检测模块向处理器发送原片不合格信号;当WR 所述质量检测模块用于对玻璃原片进行裂纹检测,所述质量检测模块包括采集单元、分析单元以及反馈单元,所述采集单元包括设置在取片台6底面的超声波探头,所述超声波探头用于对原片表面进行裂纹检测并将检测结果发送至分析单元,检测结果包括裂纹数量以及裂纹深度分析单元接收到检测结果后对原片的质量进行分析,具体分析过程包括以下步骤: Z1:若检测结果中的裂纹数量为零,则判定玻璃原片没有质量问题,质量检测模块向处理器发送质量合格信号,质量检测终止;若检测结果中的裂纹数量不为零,则判定玻璃原片存在质量问题,对检测结果进行下一步处理,同时质量检测模块向处理器发送质量不合格信号; Z2:将裂纹数量标记为o,对o个裂纹的深度值进行求和取平均数得到o个裂纹的平均深度值SDp,将裂纹数量o与o个裂纹的平均深度值SDp发送至存储模块进行存储。 所述原片评级模块用于根据原片检测结果与质量检测结果对原片进行评级; 当原片检测结果和质量检测结果均为合格时,判定原片评级结果为第一等级; 当原片检测结果和质量检测结果有且只有一个为合格时,判定原片评级结果为第二等级; 当原片检测结果与质量检测结果均为不合格时,判定原片评级结果为第三等级。 工作原理:工作时,先对玻璃原片按照厚度进行种类区分,对不同种类的玻璃原片进行分类并存放至对应的原片架;之后获取所需原片种类,将所需原片种类的原片架标记为目标原片架,控制取片装置行走至目标原片架位置;启动取片装置的驱动马达16带动第二转辊14顺时针转动,第二转辊14通过取片皮带15带动第一转辊13转动,启动电动推杆4伸出,使取片台6一侧向下移动,通过倾斜的取片皮带15对玻璃原片架进行取片,取片完成后控制电动推杆 4收缩并关闭驱动马达16,原片架在取片皮带15上水平放置;控制取片装置行走至目标上片台位置,控制驱动马达16带动第二转辊14逆时针转动,启动电动推杆4伸出,使取片台6一侧向下移动,通过倾斜的取片皮带15将原片架输送至上片台上。 以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。 上述公式均是归一化处理取其数值,公式是由采集大量数据进行软件模拟得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实际情况设定。 在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。 以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种基于AGV移动机器人的高精度定位方法及系统
- 基于视觉的叉车AGV高精度定位的系统及方法