一种可控互补的电动机供电装置及其健康管理系统
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及电动机驱动控制领域,具体涉及一种可控互补的电动机供电装置及其健康管理系统。
背景技术
由于调速方便和转矩控制性能佳等优势,电动机由逆变器驱动供电的应用日趋广泛。然而,相对于电网供电,逆变器供电一方面具有成本高和电压谐波含量高等方面的不足;另一方面,逆变器的工作原理也决定其供电可靠性低于电网供电。在对供电电源需要高可靠性的应用场合,单纯由逆变器供电存在一定风险,因此逆变器与电网采用互补供电方式对电动机运行的益处显见。
现有技术通过接触器按一系列特定顺序的投切操作配合逆变器与电网实现对电动机的互补供电的过程存在以下不足:
第一,从接触器投切指令发出到接触器对应投切动作结束,这一过程无法避免会受到诸如中间继电器和接触器动作时间的影响,造成电动机失电时间不可控且失电时间可能较长,会影响逆变器与电网互补供电的质量,进而对电动机的工作性能产生影响。例如,造成逆变器与电网的电压幅值和相位失配、对电动机和电网产生电流和机械冲击等。
第二,中间继电器和接触器延迟动作时间受系统工作时间和器件动作次数的影响较大。随着系统服役时间和动作次数的增加,电动机失电时间可能变得更长且更加不确定。这将对逆变器和电网互补供电的稳定性和安全性产生更为严重影响。
发明内容
本发明的目的在于提供一种可控互补的电动机供电装置及其健康管理系统,通过对包含中间继电器、接触器等环节投切非理想延迟时间的定量分析,能够有效控制逆变器与电网供电切换过程中电动机的失电时间。进一步配合逆变器输出电压及相位补偿控制方案可以保证逆变器与电网互补的电动机供电装置的运行性能。
一种可控互补的电动机供电装置及其健康管理系统,包括市电电网及其电网电压检测装置、电网通断控制开关、逆变器及其控制装置、网侧接触器、机侧接触器和电动机;
上述供电装置及其健康管理系统的工作方法是:
一、对系统中所有接触器的吸合延迟时间和分断延迟时间进行离线学习获取吸合延迟动作时间Δt
二、闭合电网通断控制开关和机侧接触器启动该电动机,将逆变器同步频率运行至电网频率;
三、补偿由机侧接触器和网侧接触器切换过程中短时失电引起的电压幅值和相位偏差,将电机端电压的幅值以及相位与电网电压的幅值以及相位同步,为实现逆变器与电网互补的无冲击切换做准备;
四、确定机侧接触器分断命令和网侧接触器吸合命令的时间差,并经由逆变器及其控制装置发出机侧接触器和网侧接触器的切换指令;
五、完成该电动机逆变器与电网互补的供电切换,若有其他电动机需要启动和切换,重复上述一到四的过程;
六、系统正常运行时逆变器及其控制装置中的健康管理系统保持在线学习状态;每完成一次切换,健康管理系统记录下接触器的动作时间并更新学习结果;若吸合延迟动作时间Δt
优选的,所述逆变器及其控制装置包括失电时间控制系统、健康管理系统和逆变器。
优选的,所述健康管理系统包括数字信号处理器及其相关外设,用于控制逆变器与电网互补切换过程中电动机的失电时间并监控系统健康状况;
具体方式如下:
一、接触器性能参数离线学习
系统初次投运前,对接触器动作时间进行若干次的离线学习,设定学习的吸合延迟动作时间为Δt
同理,设定学习的分断延迟动作时间为Δt
二、将上述离线学习结果记录在存储器中;
三、接触器吸合动作和分断动作控制命令时间差Δt
设定命令给定时间差值为Δt
四、接触器性能参数在线更新
系统投入运行后,每次完成切换,接触器延迟和分断动作时间都会被系统学习记录,相应μ
优选的,电压幅值的补偿分两种情况:
(1)对于恒压频比控制(V/F控制),直接在VF曲线的基础上调整输出电压和电网电压相同;
(2)对于矢量控制异步电动机,通过调节电动机的励磁电流间接调整逆变器输出电压,最后再补偿一个电压值。
优选的,矢量控制时的电压补偿量为U
优选的,相位补偿量为
本发明的优点在于:通过对包含中间继电器、接触器等环节投切非理想延迟时间的定量分析,能够有效控制逆变器与电网供电切换过程中电动机的失电时间。进一步配合逆变器输出电压及相位补偿控制方案可以保证逆变器与电网互补的电动机供电装置的运行性能。
附图说明
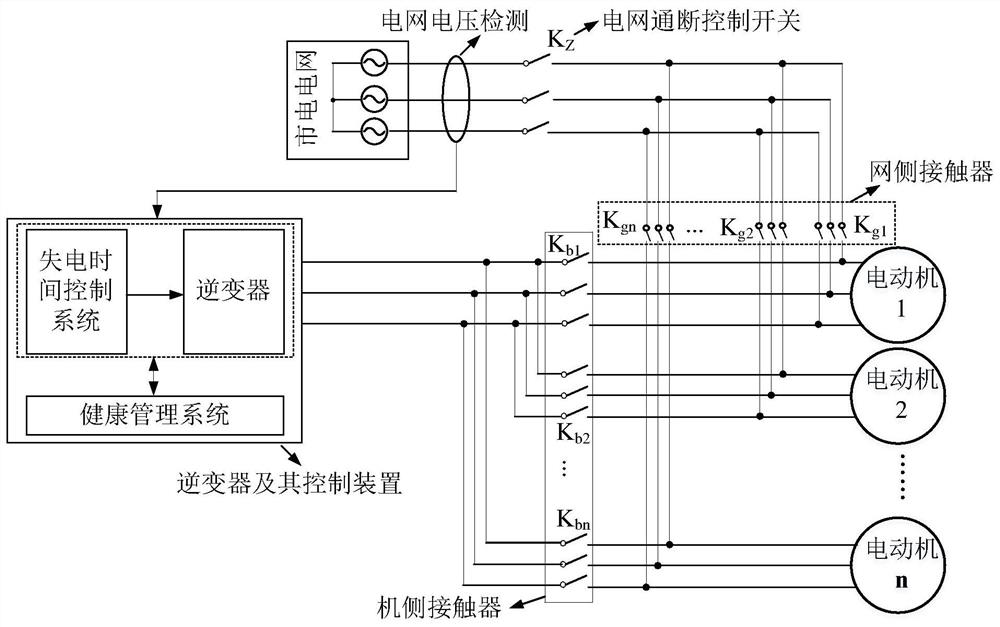
图1为本发明的逆变器与电网互补的电动机供电装置及其健康管理系统原理示意图;
图2为本发明的接触器吸合延迟动作时间和分断延迟动作时间时序图;
图3为本发明在恒压频比(V/F)控制模式下的电压相位和幅值同步示意图;
图4为本发明在矢量控制模式下的电压相位和幅值同步示意图;
图5为本发明的接触器给定与反馈命令时序图。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图5所示,一种可控互补的电动机供电装置及其健康管理系统,包括市电电网及其电网电压检测装置、电网通断控制开关、逆变器及其控制装置、网侧接触器、机侧接触器和电动机;
上述供电装置及其健康管理系统的工作方法是:
一、对系统中所有接触器的吸合延迟时间和分断延迟时间进行离线学习获取吸合延迟动作时间Δt
二、闭合电网通断控制开关和机侧接触器启动该电动机,将逆变器同步频率运行至电网频率;
三、补偿由机侧接触器和网侧接触器切换过程中短时失电引起的电压幅值和相位偏差,将电机端电压的幅值以及相位与电网电压的幅值以及相位同步,为实现逆变器与电网互补的无冲击切换做准备;
四、确定机侧接触器分断命令和网侧接触器吸合命令的时间差,并经由逆变器及其控制装置发出机侧接触器和网侧接触器的切换指令;
五、完成该电动机逆变器与电网互补的供电切换,若有其他电动机需要启动和切换,重复上述一到四的过程;
六、系统正常运行时逆变器及其控制装置中的健康管理系统保持在线学习状态;每完成一次切换,健康管理系统记录下接触器的动作时间并更新学习结果;若吸合延迟动作时间Δt
所述逆变器及其控制装置包括失电时间控制系统、健康管理系统和逆变器。
所述健康管理系统包括数字信号处理器及其相关外设,用于控制逆变器与电网互补切换过程中电动机的失电时间并监控系统健康状况;
具体方式如下:
一、接触器性能参数离线学习
系统初次投运前,对接触器动作时间进行若干次的离线学习,设定学习的吸合延迟动作时间为Δt
同理,设定学习的分断延迟动作时间为Δt
二、将上述离线学习结果记录在存储器中;
三、接触器吸合动作和分断动作控制命令时间差Δt
设定命令给定时间差值为Δt
四、接触器性能参数在线更新
系统投入运行后,每次完成切换,接触器延迟和分断动作时间都会被系统学习记录,相应μ
电压幅值的补偿分两种情况:
(1)对于恒压频比控制(V/F控制),直接在VF曲线的基础上调整输出电压和电网电压相同;
(2)对于矢量控制异步电动机,通过调节电动机的励磁电流间接调整逆变器输出电压,最后再补偿一个电压值。
矢量控制时的电压补偿量为U
相位补偿量为
具体实施方式及原理:
由于本发明在不同电动机具体实现过程基本相同,因此仅以其中某一个电动机(如电动机1)的具体实现过程为例进行说明。
本发明所述的一种可控互补的电动机供电装置及其健康管理系统具体为失电时间可控的逆变器与电网互补的电动机供电装置及其健康管理系统包括市电电网及其电网电压检测装置、电网通断控制开关K
step0:断开电网通断控制开关K
接触器每次离线学习的吸合延迟动作时间Δt
下面以电动机1为例具体说明,其他电动机的操作基本相同。
step1:闭合电网通断控制开关K
step2:将逆变器输出电压的幅值和相位同步到电网电压的幅值和相位。
对于恒压频比(V/F)控制其同步过程按图3进行。首先用逆变器的相位减去电网相位和相位补偿量,将相位差值通过PI调节器调节输出频率叠加量。将频率叠加量进行限幅后叠加在电网频率上成为逆变器实际的输出频率。频率限幅值需要设置的较小以免频率调节过快影响电机的稳定运行。达到稳定后,逆变器和电网之间的相位相对关系将维持恒定,完成相位同步过程,此时二者的差值即为补偿的相位值。电压幅值的补偿过程与之类似,将目标电压值,也就是电网电压和幅值补偿之和,与逆变器当前V/F曲线上的电压作差后,通过一斜坡模块,缓慢的叠加到当前的输出电压幅值上,成为逆变器实际输出电压。
对于矢量控制其同步过程按图4进行,首先用逆变器的相位减去电网相位和相位补偿量,将相位差值通过PI调节器调节输出频率叠加量。将频率叠加量进行限幅后叠加在电网频率上成为电机的速度给定,电机的速度给定和实际转速作差后经过速度环ASR的调节,输出转矩电流给定。励磁电流的给定值来自弱磁反比曲线模块,一般在基速以下可直接给定为零。为控制逆变器输出电压,可以构造一电压外环,用逆变器实际输出电压减去电网电压和补偿电压后,经过PI调节器,调节电机的设定励磁电流从而实现间接对电机端电压的调节。转矩电流和励磁电流经过电流环ACR调节及SVPWM调制后,完成电压的输出。达到稳定后,逆变器的输出电压幅值相位均和电网的幅值相位保持恒定的差值,它们的差值分别为幅值补偿量和相位补偿量。
上述幅值和相位同步过程的电压补偿量和相位补偿量分别为U
step3:完成逆变器与电网同步后,失电时间控制系统确定发送给网侧接触器K
step4:网侧接触器K
step5:系统正常运行时逆变器及其控制装置中的健康管理系统保持在线学习状态。每完成一次切换,健康管理系统记录下接触器的动作时间并更新学习结果。若吸合延迟动作时间Δt
其他需要启动的电动机可重复上述step1-step5步骤进行。
基于上述,本发明通过对包含中间继电器、接触器等环节投切非理想延迟时间的定量分析,能够有效控制逆变器与电网供电切换过程中电动机的失电时间。进一步配合逆变器输出电压及相位补偿控制方案可以保证逆变器与电网互补的电动机供电装置的运行性能。
由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
- 一种可控互补的电动机供电装置及其健康管理系统
- 一种逆变器与电网互补的电动机供电装置电压检测电路