基于多轴修复软骨的轨迹规划方法
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及生物3D打印技术领域,尤其涉及一种基于多轴修复软骨的轨迹规划方法。
背景技术
随着经济的发展、人们物质生活水平的提升,运动损伤、特别是关节软骨磨损的发病率较以前显著增加。全球骨关节病发病率约为3.54%,其中,中国超过4956万人。损伤后由于软骨组织缺乏血管、神经和淋巴管分布,经常无法自然愈合。目前临床主流的治疗软骨缺损的手段为自体软骨移植,其存在自体软骨来源有限、会造成额外损伤、手术较复杂且治疗费用昂贵等不足之处。关节软骨缺损由于缺乏自愈性目前仍没有有效的治疗方法。传统疗法如骨髓刺激技术和关节置换术在减轻疼痛方面是有效的,但它们不能再生成具有正常形态和功能的健康透明软骨。另外,由于这些治疗方法无法逆转软骨损伤,损伤部位可能会恶化并需要进行二次手术,严重者将导致关节功能障碍和永久性残疾。如今,软骨组织工程已成为修复软骨缺损的另一种有前景的方法。
与传统3D打印技术相比,生物3D打印技术可以实现多种种子细胞在空间各异性的高密度负载及复杂活性微环境的构建。在骨与软骨缺损的治疗中,生物3D打印不仅可以克服自体骨与软骨来源不足的问题,而且还能解决传统人工骨软骨形状无法个性化匹配及生物活性不足等问题。增材制造技术已被广泛应用于快速、低成本地制造三维物体。然而,由具有曲率的复杂几何形状组成的构件对于传统的AM系统来说是一个具有挑战性的过程,由于打印机只有X,Y,Z这3个自由度,其能力仅限于平面分层打印。而骨骼形状相比一般零件更为复杂,表面由许多复杂的曲面组成,使用传统打印方法很难保证打印骨骼的表面的质量。仅使用平面水平层构造部件限制了基于材料沉积的增材制造工艺的能力。通过在复杂的曲面层上沉积材料,使用6自由度关节式机器人臂进行材料沉积可以显著扩展增材制造工艺的能力。
获得正确的打印纤维取向对这些骨骼的正常工作是至关重要的,正确的打印纤维取向可以明显的提高结构强度。使用传统的平面层材料沉积工艺打印它们,在层的平面定向纤维,这通常会导致不良的纤维取向。打印骨骼这样的零件需要能够沿着三维曲线定位纤维,为了满足这一要求,需要具有沿曲面层沉积材料的能力。
因此,本申请提供一种采用6自由度关节式机器人臂的打印损伤软骨的打印轨迹规划方法。
发明内容
有鉴于此,本发明提供一种基于多轴修复软骨的轨迹规划方法,其特征在于:所述方法包括如下步骤:
S1:确定待修复软骨损伤部位的三维模型;
S2:根据损伤部位的三维模型确定多自由度关节式机器人的喷头轨迹;
S3:通过喷头轨迹,确定多自由度关节式机器人的打印轨迹;
S4:根据多自由度关节式机器人的打印轨迹,修复软骨的损伤部位。
进一步,利用医学CT扫描人体损伤软骨和正常软骨得到DICOM格式影像图,通过DICOM格式影像图生成软骨三维模型,通过损伤软骨和正常软骨三维模型的对比获得软骨损伤部位的三维模型,得到软骨损伤部位的三维模型的STL文件。
进一步,所述步骤S2包括:
S21:从STL文件中提取顶点、面和三角形面片单位法向量的信息,并分别存储在集合V、F和N中:
V={v
F={f
N={n
S22:集合V中顶点V
其中,参考平面中x、y范围如下所示:
min(x)-d≤x≤max(x)+d,min(y)-d≤y≤max(y)+d,其中,d表示一个使参考平面的大小大于投影部分的大小的正变量;
S23:在投影参考平面上,生成喷头移动的平面轨迹,并将轨迹点的数据记录到集合P
P
S24:从平面轨迹中识别STL模型的底面,其方法如下:
S241:将STL模型的法线系数k为负的法线存储到集合N中的子集合N
N
S242:将集合N
S243:将集合N
P
S25:确定参考平面轨迹点在STL模型底面对应的三维空间轨迹点:
S251:构建STL模型三角面片的顶点生成平面模型,所述模型为:Ax+By+Cz+D=0,其中,A表示x的系数,B表示y的系数变量,C表示z的系数变量,D表示常数,x表示三角面片的顶点x坐标,y表示三角面片的顶点y坐标,z表示三角面片的顶点z坐标;S252:将集合P
S26:将得到三维空间轨迹点坐标和它对应STL模型三角面片的单位法向信息储存到集合P
P
S27:通过欧拉角确定喷头姿态信息,将得到喷头的姿态信息同位置信息一起储存在集合Pin;projected;
R
R
其中,R
S28:将得到的空间轨迹点生成连续的喷头移动轨迹;
S29:根据喷头直径提高z轴高度,w=w+1,其中,w表示正整数自然数,判断w是否大于集合V的元素个数,若是,则退出,若否,则进入步骤S2。
进一步,步骤S23在投影参考平面上生成的喷头移动的平面轨迹绕预设的角度绕轴进行旋转,所述旋转用于曲面层与层之间的轨迹交叉,提高结构强度。
进一步,S31:在机器人轨迹路径点上的每个圆锥表面对可能的喷头倾角进行取样,并将样本存储在集合P
S32:确定机器人的喷头表面与打印底座的最小距离d,并判断d是否小于零,若是,则从P
其中,机器人的喷头与障碍物之间的距离通过如下方法确定:
d(θ
其中,d(θ
当d(θ
S33:确定机器人的各个位置点的关节空间θn,并判断判断机器人关节空间θ
通过求解机器人的机器人逆运动学IK,将所有剩余的喷头位形样本转化为机器人关节空间
判断机器人关节空间θ
S34:确定机器人自由度轴的角速度
其中,
S35:判断机器人是否找到合适的位形,若是,则进入下一步,若否,则进入步骤S31;所述合适为
S36:取P
本发明的有益技术效果:本申请的基于多轴修复软骨的轨迹规划方法可准确对比复原软骨损伤部分,并通过损伤部分的三维模型快速打印出损伤部分,完成软骨修复;本方法可有效规避自体软骨来源有效的问题,打印的损伤部分匹配度高,不会造成额外损伤,快速修复软骨损伤;实现了空间曲面3D打印,减少了由采用平面3D打印而产生的阶梯效应,而且曲面修复的骨骼比平面修复的骨骼的抗冲击性的力学性能更好。
附图说明
下面结合附图和实施例对本发明作进一步描述:
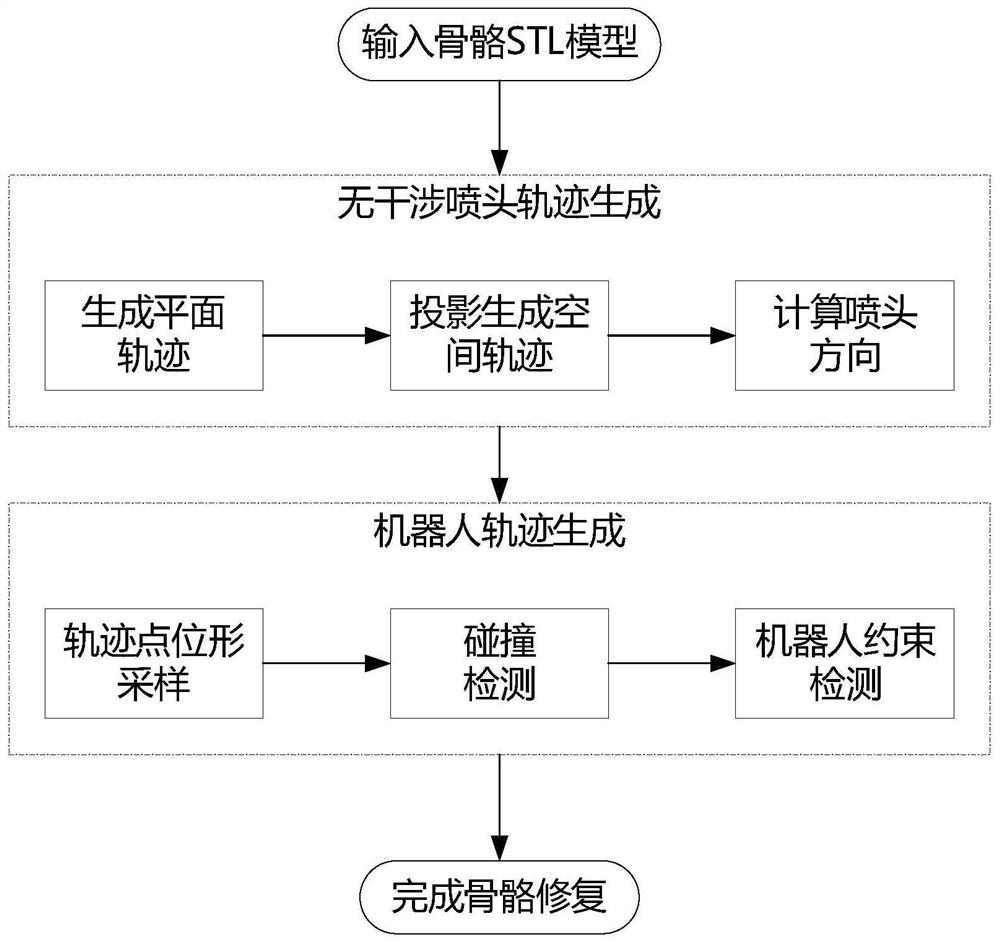
图1为本申请规划方法的流程图。
图2为本申请的打印设备机构示意图。
图3为本申请的喷头打印曲面旋转示意图。
图4为本申请的机器人打印轨迹的不同位置圆锥体示意图。
具体实施方式
以下结合说明书附图对本发明做出进一步的说明:
本发明提供一种基于多轴修复软骨的轨迹规划方法,其特征在于:所述方法包括如下步骤:
S1:确定待修复软骨损伤部位的三维模型;
S2:根据损伤部位的三维模型确定多自由度关节式机器人的喷头轨迹;在本实施例中的多自由度关节式机器人为6自由度关节式机器人,即6轴机器人。
S3:通过喷头轨迹,确定多自由度关节式机器人的打印轨迹;
S4:根据多自由度关节式机器人的打印轨迹,修复软骨的损伤部位。
上述技术方案,实现了空间曲面3D打印,减少了由采用平面3D打印而产生的阶梯效应,而且曲面修复的骨骼比平面修复的骨骼的抗冲击性的力学性能更好。
在本实施例中,利用医学CT扫描人体损伤软骨和正常软骨得到DICOM格式影像图,通过DICOM格式影像图生成软骨三维模型,通过损伤软骨和正常软骨三维模型的对比获得软骨损伤部位的三维模型,得到软骨损伤部位的三维模型的STL文件。上述技术方案,是为了确定待修复部位的软管的STL模型。其中,CT表示电子计算机断层扫描,DICOM格式是一个存储医疗图像的文件格式协议。DICOM是医学数字成像和通信,是医学图像和相关信息的国际标准,它定义了质量能满足临床需要的可用于数据交换的医学图像格式。STL文件是在计算机图形应用系统中,用于表示三角形网格的一种文件格式;它的文件格式非常简单,应用很广泛;STL是最多快速原型系统所应用的标准文件类型,是用三角网格来表现3D、CAD模型;STereo Lithography的缩写,由3D Systems公司开发而来,它使用三角形面片来表示三维实体模型,现已成为CAD、CAM系统接口文件格式的工业标准之一,绝大多数造型系统能支持并生成此种格式文件。
在本实施例中,所述步骤S2包括:
S21:从STL文件中提取顶点、面和三角形面片单位法向量的信息,并分别存储在集合V、F和N中:
V={v
F={f
N={n
S22:集合V中顶点V
其中,参考平面中x、y范围如下所示:
min(x)-d≤x≤max(x)+d,min(y)-d≤y≤max(y)+d,其中,d表示一个使参考平面的大小大于投影部分的大小的正变量;
S23:在投影参考平面上,生成喷头移动的平面轨迹,并将轨迹点的数据记录到集合P
P
S24:从平面轨迹中识别STL模型的底面,其方法如下:
S241:将STL模型的法线系数k为负的法线存储到集合N中的子集合N
N
S242:将集合N
S243:将集合N
P
S25:确定参考平面轨迹点在STL模型底面对应的三维空间轨迹点:
S251:构建STL模型三角面片的顶点生成平面模型,所述模型为:Ax+By+Cz+D=0,其中,A表示x的系数,B表示y的系数变量,C表示z的系数变量,D表示常数,x表示三角面片的顶点x坐标,y表示三角面片的顶点y坐标,z表示三角面片的顶点z坐标;
S252:将集合Pin中第m个三角面片对应三角形中的轨迹点的x,y坐标值代入对应平面方程中得到对应的z轴坐标,得到的参考平面轨迹点在STL模型底面的对应三维空间轨迹点;
其中,STL模型三角面片的求解过程如下:首先确定平面模型的系数A、B、C和D,随后将X,Y坐标代入已知系数的平面模型,获得Z轴坐标,即获得参考平面轨迹点在STL模型底面的对应三维空间轨迹点三维坐标
首先,将集合F中的第m个三角面片信息代入方程中得到如下式子:
A=(v
B=(v
C=(v
D=A*v
获得系数A、B、C和D的表达式;
其中,v
随后将集合P
S26:将得到三维空间轨迹点坐标和它对应STL模型三角面片的单位法向信息储存到集合P
P
S27:通过欧拉角确定喷头姿态信息,将得到喷头的姿态信息同位置信息一起储存在集合Pin;projected;
R
R
其中,R
S28:将得到的空间轨迹点生成连续的喷头移动轨迹;
S29:根据喷头直径提高z轴高度,w=w+1,其中,w表示正整数自然数,判断w是否大于集合V的元素个数,若是,则退出,若否,则进入步骤S2。
在本实施例中,所述步骤S2还包括:步骤S23在投影参考平面上生成的喷头移动的平面轨迹绕预设的角度绕轴进行旋转,所述旋转用于曲面的层与层之间的轨迹交叉,提高结构强度。在本实施例中,所述预设的角度为每次绕中心点旋转10~20度,如图3所示,第二曲面在第一曲面的基础上旋转10-20度,第三曲面在第二曲面的基础上旋转10-20度,第四曲面在第三曲面的基础上旋转10-20度,依次类推。通过旋转决定打印的纤维取向,通过正确的打印纤维取向提高软骨的结构强度。
在本实施例中,喷头轨迹生成的路径点在坐标系中,不考虑关节机械臂执行加工过程所施加的约束和参数。这些路径点信息包括喷头的位置和喷头的倾斜角,以便喷头以一致的方式在表面上移动。喷头位形和机器人位形之间的映射本质上是高度非线性的,在大多数情况下不是一一对应的。可能一个喷头位置信息,对应无数个机器人轨迹,即机器人可通过不同的路径到达喷头位置,所以需要根据喷头轨迹信息求解机器人轨迹。
喷头轨迹点的位置(x,y,z)和喷头倾角(R
R
R
R
不同位置圆锥体如图4所示。
S31:在机器人轨迹路径点上的每个圆锥表面对可能的喷头倾角进行取样,并将样本存储在集合P
S32:确定机器人的喷头表面与打印底座的最小距离d,并判断d是否小于零,若是,则从P
其中,机器人的喷头与障碍物之间的距离通过如下方法确定:
d(θ
其中,d(θ
当d(θ
S33:确定机器人的各个位置点的关节空间θn,并判断判断机器人关节空间θ
通过求解机器人的机器人逆运动学IK,将所有剩余的喷头位形样本转化为机器人关节空间
判断机器人关节空间θ
S34:确定机器人自由度轴的角速度
其中,
S35:判断机器人是否找到合适的位形,若是,则进入下一步,若否,则进入步骤S31;所述合适为
S36:取P
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 基于多轴修复软骨的轨迹规划方法
- 基于3D打印技术的软骨修复系统及其软骨修复方法