一种风向变化导致偏航的自动回正船
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于船舶技术领域,具体涉及一种风向变化导致偏航的自动回正船。
背景技术
船舶(boats and ships),各种船只的总称,船舶是能航行或停泊于水域进行运输或作业的交通工具。内部主要包括容纳空间、支撑结构和排水结构,具有利用外在或自带能源的推进系统。外型一般是利于克服流体阻力的流线性包络,材料随着科技进步不断更新,早期为木、竹、麻等自然材料,近代多是钢材以及铝、玻璃纤维、亚克力和各种复合材料。
船在水上航行的时候,由于外界的环境多变,风速及风向也会不断的发生改变,这样船会受到“风压差”的影响,在航行的时候会偏离已拟定的航线,需要水手来操控船尾舵来控制船舶保持前行以及转向,这种方式来控制船舶保持前行的稳定性较差,需要经验丰富的水手进行操作。为此我们设计出了一种风向变化导致偏航的自动回正船来解决上述的问题。
发明内容
为解决船舶在水上航行容易受风的影响从而改变航向的问题,本发明采用如下的技术方案。
一种风向变化导致偏航的自动回正船,其特征在于:包括船体、安装板、桅杆、转轴及弹簧;
船体上端面设置有甲板,安装板位于船体底端面与甲板之间;
桅杆的一端贯穿甲板与安装板,并分别与甲板、安装板转动连接,桅杆的另一端固定设置有船帆,船帆朝向船体尾部;
桅杆上固定设置有第一连杆,第一连杆位于甲板与安装板之间,第一连杆与桅杆垂直,第一连杆的另一端固定设置有第一弧形齿条;
船体尾部的上下端面通过转轴连接有船尾舵,转轴垂直于船体上端面;
船尾舵上固定设置有第二连杆,第二连杆朝向船体头部方向,第二连杆的另一端固定设置有第二弧形齿条,第二弧形齿条与第一弧形齿条相互啮合;
船体上还设置有螺旋桨。
优选地,安装板上端面还设置有支撑块,支撑块的数量为二,关于第一连杆对称设置,支撑块与第一连杆之间通过弹簧弹性连接,支撑块靠近第一连杆的侧面还设置有电磁铁。
优选地,电磁铁与控制系统电性连接。
优选地,第一弧形齿条的圆心与桅杆的轴线重合,第二弧形齿条的圆心与转轴的轴线重合。
优选地,第一连杆上镶嵌有永磁铁,永磁铁与电磁铁的位置对应。
与现有技术相比,本发明的有益效果是:
一、本发明风向变化导致偏航的自动回正船,船舶在水上航行的时候,由于风向及风速的改变,船体将会在“风压差”的作用下发生偏航,并且在风的作用船帆将会转动,从而带动第一弧形齿条转动,于是与之啮合的第二弧形齿条开始转动,第二弧形齿条的转动将会带动船尾舵绕转轴转动,从而对偏航的船进行补偿,将其航向纠正,无需水手的操作,稳定性好。
二、本发明风向变化导致偏航的自动回正船,通过弹簧的设计,可以便于在风结束后,船帆的回位,这样船尾舵将会回位,使船舶按指定方向继续航行。
三、本发明风向变化导致偏航的自动回正船,通过与控制系统电性连接的电磁铁的设计,在需要改变航向时,可以分别控制第一连杆左右两侧的电磁铁的磁性方向及磁性的大小,从而使第一连杆转动,改变船尾舵的方向,这样就可以改变船舶航行的方向。
附图说明
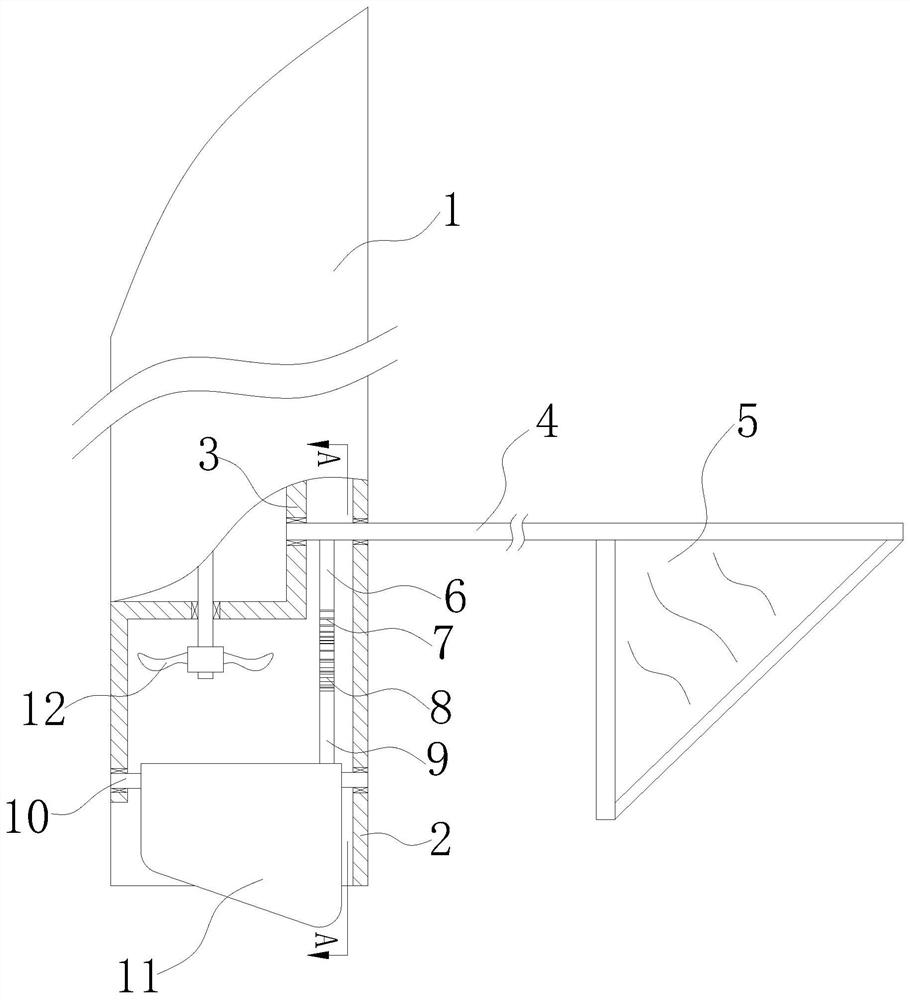
图1为本发明实施例1的结构示意图;
图2为本发明图1A-A处的剖视图;
图3为本发明实施例1起风后的示意图;
图4为本发明实施例3的结构示意图;
图中:1、船体,2、甲板,3、安装板,4、桅杆,5、船帆,6、第一连杆,7、第一弧形齿条,8、第二弧形齿条,9、第二连杆,10、转轴,11、船尾舵,12、螺旋桨,13、支撑块,14、电磁铁,15、弹簧,16、永磁铁,17、加强杆。
具体实施方式
实施例1:
请参阅图1-3所示的一种风向变化导致偏航的自动回正船,它是能够防止在水中航行的船舶由于风向的改变而偏航的一种风向变化导致偏航的自动回正船。具体地,一种风向变化导致偏航的自动回正船,包括船体1、安装板3、桅杆4、转轴10及弹簧15。
船体1上端面设置有甲板2,安装板3位于船体1底端面与甲板2之间,桅杆4的一端贯穿甲板2与安装板3,并分别与甲板2、安装板3转动连接,桅杆4的另一端固定设置有船帆5,船帆5朝向船体1尾部。
桅杆4上固定设置有第一连杆6,第一连杆6上镶嵌有永磁铁16,永磁铁16与电磁铁14的位置对应,第一连杆6位于甲板2与安装板3之间,第一连杆6与桅杆4垂直,第一连杆6的另一端固定设置有第一弧形齿条7。
船体1尾部的上下端面通过转轴10连接有船尾舵11,转轴10垂直于船体1上端面,船尾舵11上固定设置有第二连杆9,第二连杆9朝向船体1头部方向,第二连杆9的另一端固定设置有第二弧形齿条8,第二弧形齿条8与第一弧形齿条7相互啮合,第一弧形齿条7的圆心与桅杆4的轴线重合,第二弧形齿条8的圆心与转轴10的轴线重合。
船体1上还设置有螺旋桨12。
安装板3上端面还设置有支撑块13,支撑块13的数量为二,关于第一连杆6对称设置,支撑块13与第一连杆6之间通过弹簧15弹性连接,这样可以便于在风结束后,船帆5的回位,这样船尾舵11将会回位,使船舶按指定方向继续航行。
支撑块13靠近第一连杆6的侧面还设置有电磁铁14,电磁铁14与控制系统电性连接,这样在需要改变航向时,可以分别控制第一连杆6左右两侧的电磁铁14的磁性方向及磁性的大小,从而使第一连杆6转动,改变船尾舵11的方向,这样就可以改变船舶航行的方向。
船舶在水中航行时,当船体1左舷受风时,船体1将会在“风压差”的作用下往右偏航,如图3所示,船体1上的船帆5将会绕桅杆4往右转动,与此同时,第一连杆6将会在桅杆4的作用下往右转动,从而带动第一弧形齿条7转动,于是与之啮合的第二弧形齿条8将会绕转轴10往右开始转动,第二弧形齿条8的转动将会带动船尾舵11绕转轴10往左转动,于是船尾舵11左侧面成为迎水面,船尾舵11右侧面是背水面。水流在绕过船尾舵11时,背水面的水流流程比迎水面的要长一些,背水面的水流速度也更快。而水流速度快的一侧静压力要低一些,即背水面的压力要比迎水面的压力低,这样迎水面和背水面之间会产生一个压力差,这样在这个压力差的作用下船体1将会往左转向。从而对往右偏航的船进行补偿,将其航向纠正。
当船体1右舷受风时,船体1将会在“风压差”的作用下往左偏航,同理,船尾舵11将绕转轴10往右转动,船尾舵11两端面将会产生压力差,在这个压力差的作用下船体1将会往右转向,从而对往左偏航的船进行补偿,将其航向纠正。
人为对船体1转向时,通过控制系统,分别控制第一连杆6左右两侧的电磁铁14的磁性方向及磁性的大小,从而使第一连杆6、第一弧形齿条7、第二弧形齿条8、第二连杆9分别转动,从而改变船尾舵11的方向,这样就可以改变船舶航行的方向。
实施例2:
另一种风向变化导致偏航的自动回正船与实施例1的区别在于:弹簧15的一端设置有压力传感器,控制系统上电性连接有警报器,当船舶航行自动回正时,若船体1受到的风过大时,船帆5转动的幅度将会变大,从而第一连杆6与支撑块13之间的弹簧15受到的压力变大,当压力值达到设定时,警报器将会发出警报,使水手知悉,从而人为控制船的航向,更加安全,并且人为控制时警报器将会停止工作。
实施例3:
另一种风向变化导致偏航的自动回正船与实施例1的区别在于:如图4所示,第一连杆6与第一弧形齿条7之间、第二弧形齿条8与第二连杆9之间均设置有加强杆17,使连接更加牢固可靠。
- 一种风向变化导致偏航的自动回正船
- 一种带自动偏离风向保护的偏航系统