预兆感测装置以及预兆感测方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及用于检测突变振动的预兆的预兆感测装置以及预兆感测方法。
背景技术
在燃气轮机、蒸汽轮机、发动机、锅炉、航空器、压缩机等机械中,在燃烧器、压缩机、叶片等有时会产生燃烧振动、轴振动。这些振动中有突变倾向的不稳定的振动(突变振动)在振动增大后在短时间内到达极限环(1imit cycle)。当到达极限环时,会导致紧急停止,或对设备造成很大负担。
因此,理想的是在早期阶段避免如上所述的突变振动。但是,到达极限环之前的振动增大是短时间的,因此感测到振动增大后的控制有时无法避免突变振动。为了避免突变振动,需要比突变振动的发生时间充分提前地感测其预兆。
近年来,提出了以事先感测突变振动为目的的感测技术。例如,在专利文献1中公开了使用与燃气轮机的燃烧器内的压力关联的值来感测燃烧振动的装置。该装置构成为获取与燃气轮机的燃烧器内的压力关联的值来解析网络熵,在该网络熵低于阈值的情况下感测燃烧振动的发生。
现有技术文献
专利文献
专利文献1:日本特开2018-80621号公报
发明内容
发明要解决的问题
本申请发明者进行了深入研究,其结果是明确了:在构成为基于某个物理量(例如压力)的振幅检测突变振动(设备的损伤风险高的振动)的振动感测装置感测到突变振动的发生之前,存在发生概率上升的振型。如果利用如上所述的振型的发生概率,则能够感测突变振动的预兆。
但是,即使如专利文献1那样获取一个位置处的物理量(与燃烧器内的压力相关的值)的时间序列变动数据并解析网络熵,也难以求出振型的发生概率。此外,即使着眼于一个物理量的时间序列变动数据,也难以比突变振动的发生时间充分提前地感测其预兆。
鉴于上述的情况,本发明的目的在于,比突变振动的发生时间充分提前地感测突变振动。
技术方案
本发明的预兆感测装置具备:
多个传感器,分别配置在感测对象物的多个位置,构成为测量各位置处的物理量;
数据获取部,从所述多个传感器获取所述物理量的时间序列变动数据;
运算部,根据所述多个位置的各个上的所述物理量的所述时间序列变动数据的振幅或相位,运算与所述感测对象物的突变振动有关的振型的发生概率;以及
感测部,基于所述发生概率感测所述突变振动的预兆。
本发明的预兆感测方法包括:
分别配置在感测对象物的多个位置的多个传感器测量各位置处的物理量的步骤;
从所述多个传感器获取所述物理量的时间序列变动数据的步骤;
根据所述多个位置的各个上的所述物理量的所述时间序列变动数据的振幅或相位,运算与所述感测对象物的突变振动有关的振型的发生概率的步骤;以及
基于所述发生概率感测所述突变振动的预兆的步骤。
有益效果
根据本发明,能够比突变振动的发生时间充分提前地感测突变振动。
附图说明
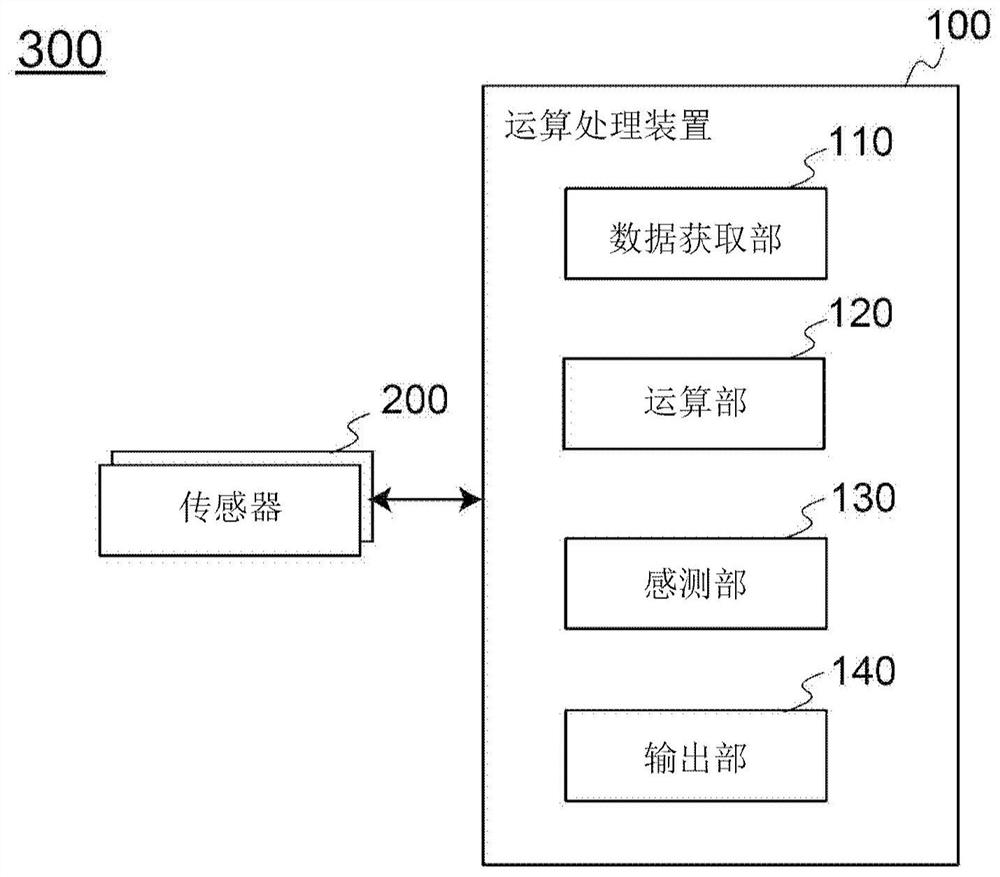
图1是表示一个实施方式的预兆感测装置的构成的框图。
图2是表示一个实施方式的预兆感测装置的传感器的配置例的示意图。
图3是表示一个实施方式的预兆感测装置的传感器的配置例的概略剖视图。
图4是用于说明一个实施方式的预兆感测装置计算出的多个位置处的物理量的归一化振幅的概念图。
图5A是用于说明一个实施方式的预兆感测装置计算出的相位同步参数的概念图。
图5B是表示判别为两个位置处的物理量的相位同步的一个例子的概念图。
图5C是表示判别为两个位置处的物理量的相位同步的一个例子的概念图。
图6A是用于说明发生了0ND振型的情况下的多个位置的相位关系的概念图。
图6B是用于说明发生了1ND振型的情况下的多个位置的相位关系的概念图。
图6C是用于说明发生了2ND振型的情况下的多个位置的相位关系的概念图。
图7是表示一个实施方式的预兆感测装置基于物理量的振幅计算出的振型发生概率的推移的一个例子的曲线图。
图8是表示一个实施方式的预兆感测装置基于物理量的相位计算出的振型发生概率的推移的一个例子的曲线图。
图9是表示一个实施方式的预兆感测方法的顺序的流程图。
具体实施方式
以下,参照附图对一些实施方式进行说明。不过,作为实施方式所记载的或在附图中所示的构成零件的尺寸、材质、形状及其相对配置等并非旨在将发明的范围限定于此,仅作为说明例而已。
例如,“在某方向”、“沿某方向”、“平行”、“正交”、“中心”、“同心”或者“同轴”等表示相对或绝对配置的表达,不仅严格地表示这样的配置,而且也表示以具有公差或具有能够获取相同功能的程度的角度或距离的方式进行了相对位移的状态。
例如,“相同”、“相等”以及“均质”等表示事物处于相等状态的表达,不仅严格地表示相等状态,而且也表示存在有公差或存在有能够获取相同功能的程度的差异的状态。
例如,四边形状或圆筒形状等表示形状的表达,不仅表示严格的几何学意义中的四边形状或圆筒形状等形状,而且也表示在能够获取相同效果的范围内,包括凹凸部或倒角部等的形状。
另一方面,“设置”、“备置”、“具备”、“包括”、或“具有”一个构成要素这样的表达,并非是将其他构成要素的存在排除在外的排他性表达。
(预兆感测装置)
以下,对一个实施方式的预兆感测装置300进行说明。图1是表示一个实施方式的预兆感测装置300的构成的框图。
如图1所示,预兆感测装置300具备多个传感器200以及构成为执行用于感测突变振动的预兆的运算处理的运算处理装置100。传感器200是构成为测量感测对象物的物理量的传感器。
多个传感器200分别配置在感测对象物的多个位置,测量各位置处的物理量。传感器200测量的物理量例如是压力、应变、加速度、速度、位移中的任意一个以上。需要说明的是,传感器200测量的物理量不限于这些物理量。传感器200测量的物理量只要是与振型的发生的关联性高的物理量即可。
运算处理装置100例如是具备CPU(Central Processing Unit:中央处理器)、RAM(Random Access Memory:随机存取存储器)、ROM(Read Only Memory:只读存储器)等的计算机。在运算处理装置100中,通过处理器(CPU)执行存储于存储器(RAM或ROM)的程序来实现后述的各种功能。
以下,对运算处理装置100的功能性的构成进行说明。如图1所示,运算处理装置100作为数据获取部110、运算部120、感测部130、输出部140发挥功能。
数据获取部110从多个传感器200获取物理量的时间序列变动数据。时间序列变动数据是在最近过去的规定时间(例如,1秒钟)内在多个定时采样的测量数据。
运算部120基于数据获取部110获取的物理量的时间序列变动数据来运算与感测对象物的突变振动有关的振型的发生概率。具体而言,运算部120构成为根据在多个位置的各个位置处测量的物理量的时间序列变动数据来运算振型的发生概率。
在此,振型的发生概率的运算方法有基于物理量的时间序列变动数据的振幅的运算方法和基于物理量的时间序列变动数据的相位的运算方法。在运算部120的运算处理中,可以采用这些运算方法中的任意一方,也可以采用将两方组合的方法。物理量的时间序列变动数据的振幅可以是求出时间上变化的振幅的变动分量的函数并向该函数输入特定时刻的情况下的振幅的瞬时值。需要说明的是,关于振型的发生概率的两个运算方法的详情,将在后文加以记述。
感测部130构成为基于运算部120运算的振型的发生概率来感测突变振动的预兆。具体而言,感测部130基于运算部120运算的振型的发生概率的大小或其时间变化的斜率来判别是否是应感测的突变振动的预兆。将在后文加以记述该判别方法的详情。
输出部140构成为在感测部130感测到突变振动的预兆的情况下输出规定的信号。规定的信号例如是用于使感测对象物的动作停止的停止信号、用于使感测对象物的输出降低的输出控制信号、用于向用户通知是突变振动的预兆的通知信号等对避免突变振动有效的信号。需要说明的是,可以省略输出部140。
(感测对象物和传感器的配置例)
以下,对一个实施方式的感测对象物和传感器200的配置例进行说明。图2是表示一个实施方式的预兆感测装置300的传感器200的配置例的示意图。该图示出了沿与燃气轮机20的涡轮轴垂直的方向的剖面。图3是表示一个实施方式的预兆感测装置300的传感器200的配置例的概略剖视图。该图示出了沿燃气轮机20的涡轮轴的剖面。
在一个实施方式中,预兆感测装置300的感测对象物例如可以是图2以及图3所示的燃气轮机20。需要说明的是,感测对象物可以不是燃气轮机20,例如,也可以是蒸汽轮机、发动机、锅炉、航空器、压缩机等机械。
如图2以及图3所示,燃气轮机20具备压缩机7、燃烧器8、静叶4以及动叶6。如图3所示,燃烧器8具备分别具有燃料喷嘴9、内筒2以及尾筒3的八个罐型燃烧器。传感器200是用于测量燃烧器8的内部的压力的压力传感器。传感器200配置在八个尾筒3的每一个。
需要说明的是,在该例子中,传感器200配置在燃气轮机20的燃烧器8的尾筒3。但是,传感器200的配置不限于如上所述的例子。传感器200只要配置在能够观测振型的位置即可,根据感测对象物的种类,也可以配置在压缩机、叶片、轴承等。
(基于振幅的振型的发生概率的运算方法)
以下,基于物理量的时间序列变动数据所示的振幅,对运算振型的发生概率的运算方法进行说明。运算部120基于多个位置处的物理量的同时刻的振幅来判定振型是否发生。运算部120可以根据时间序列变动数据的波形通过希尔伯特(Hilbert)变换求出振幅和相位,并使用其振幅的瞬时值。例如,运算部120可以在将多个位置处的物理量的同时刻的振幅进行归一化后进行合计,根据合计值判定振型是否发生。
在将多个时间序列变动数据的同时刻的振幅进行了合计的情况下,在高阶ND振型中,振幅的合计值在理论上为零,与此相对,在0ND振型中,振幅的合计值在理论上为有限值(非零的值)。需要说明的是,ND(Nodal Diameter:波节直径)是指在振型中不振动的波节直径的个数。
在燃气轮机20中,只有0ND振型会赋予突变振动。图4是用于说明一个实施方式的预兆感测装置300计算出的多个位置处的物理量的归一化振幅的概念图。在图4中,与#1~#8对应的标示示出了图2所示的燃气轮机20的燃烧器8的八个尾筒3的各个的归一化振幅。各个标示所示的归一化振幅可以取1~-1的范围内的值。不过,在该例子中,示出了同相同振幅,因此每个标示都是接近1的值。在该情况下,与#1~#8对应的标示所示的归一化振幅的合计值不是零。
运算部120可以在合计值比根据多个传感器200的个数设定的第一阈值大的情况下,判定为振型发生。例如,在使用归一化的振幅瞬时值的情况下,将传感器200的个数(例如8)乘以1以下的系数(例如0.5)而得到的值设定为第一阈值(例如4)。系数为考虑判定误差的大小,能够在0以上1以下的范围内适当变更。在图4所示的例子中,比第一阈值大,因此判定0ND振型没有发生。
根据如上所述的判定方法,通过振幅的合计值来判定0ND振型是否发生,适合于感测由0ND振型引起的突变振动的情况。此外,通过与第一阈值的比较能够容易地判定有无振型(0ND振型)的发生。优选能迅速感测突变振动的预兆,因此如上所述的判定方法是有利的。需要说明的是,根据如上所述的基于振幅的振型的发生的判定,有时精度比后述的基于相位的判定高。
运算部120可以构成为搜索多个位置中任一个位置处的时间序列变动数据的振幅的峰值发生时刻,基于该峰值发生时刻的多个位置处的物理量的振幅来判定振型是否发生。振幅的峰值发生时刻是振型的发生状态易于反映在振幅上的时刻。这一点,在上述构成中,在振型是否发生的判定中,使用多个位置中任一个位置(特定位置)处的时间序列变动数据的振幅的峰值发生时刻。因此,提高了判定精度。
运算部120可以构成为在规定时间内(例如1秒钟)的多个定时(例如100次)判定振型是否发生,将该多个定时中判定为振型发生的次数的比例作为振型的发生概率进行运算。根据该构成,针对多个定时,判定振型是否发生,将其作为振型的发生概率进行运算,因此与仅用1次定时运算振型的发生概率的情况相比能够提高精度。
(基于相位的振型的发生概率的运算方法)
以下,基于物理量的时间序列变动数据所示的相位,对运算振型的发生概率的运算方法进行说明。运算部120根据多个位置处的物理量的相位是否同步来判定振型是否发生。运算部120可以根据时间序列变动数据的波形,通过希尔伯特变换来求出相位差。例如,运算部120可以将从多个传感器200获取到的多个时间序列变动数据中的一个时间序列变动数据作为基准数据,针对其他的时间序列变动数据的各自的相位计算出与基准数据的相位的相位差,基于计算出的相位差是否在同相范围内或逆相范围内来判定相位是否同步。
在根据相位差评价相位是否同步的情况下,可以计算出下列算式(1)所示的相位同步参数r
图5A是用于说明一个实施方式的预兆感测装置300计算出的相位同步参数r
在相位的同步判定中,同相范围内的相位差例如设定为与±10°以内相当的範围。逆相范围内的相位差例如设定为与180±10°以内相当的范围。需要说明的是,这些宽度是考虑了判定误差的大小,可以适当变更。此外,这些也可以不是相位差的范围本身,而是将相位差的范围换算为上述的相位同步参数的范围。
图5B是表示判别为两个位置处的物理量的相位同步的一个例子的概念图。图5C是表示判别为两个位置处的物理量的相位同步的一个例子的概念图。例如,如图5B所示,在相位θ
运算部120可以在计算出的相位差为同相范围内或逆相范围内的时间序列变动数据的个数比根据多个传感器200的个数设定的第二阈值大的情况下,判定为振型发生。例如,将传感器200的个数(例如8)乘以1以下的系数(例如0.5)而得到的值设定为第二阈值(例如4)。系数为考虑判定误差的大小,能够在0以上1以下的范围内适当变更。
图6A是用于说明发生了0ND振型的情况下的多个位置的相位关系的概念图。图6B是用于说明发生了1ND振型的情况下的多个位置的相位关系的概念图。图6C是用于说明发生了2ND振型的情况下的多个位置的相位关系的概念图。
这些图示出了在0ND振型和高阶ND(1ND、2ND)振型的模式形成截面上配置的多个传感器200测量的时间序列变动数据的相位。例如,在图6A中,在模式形成截面的任何位置上,振动的相位都是0°。在该情况下,当对位置进行相互比较时,相位差为同相。例如,在图6B中,在模式形成截面的左右分为0°和180°。在该情况下,当对位置进行相互比较时,根据位置相位差为同相或逆相。例如,在图6C中,在模式形成截面的上下左右分为0°和180°。在该情况下,当对位置进行相互比较时,根据位置相位差为同相或逆相。
根据这些图,无论在支配性的产生了哪个振型的情况下,当对位置进行相互比较时,其相位差都为同相或逆相。因此,在确认了不同位置的传感器200的时间序列变动数据所示的相位差为同相或逆相的情况下,可知0ND或高阶ND的振型发生。需要说明的是,在3ND以上的高阶ND振型中,也是同样的。
因此,根据基于物理量的时间序列变动数据的相位以上述的方式进行判定的判定方法,无论是0ND振型还是高阶ND振型引起的突变振动都能够进行感测。即,与突变振动关联的振型不限于0ND振型,因此提高了通用性。
在振型发生的情况下,物理量的时间序列变动数据的相位的同步状态建立,某个时间序列变动数据的相位与其他的时间序列变动数据的相位之间的相位差在同相范围内或逆相范围内。因此,在上述的判定方法中,通过着眼于其相位差,能够容易地判定相位是否同步。
此外,根据上述的判定方法,通过与第二阈值的比较能够容易地判定有无振型(0ND振型或高阶ND振型)的发生。优选能迅速感测突变振动的预兆,因此如上所述的构成是有利的。
运算部120可以构成为在规定时间内(例如1秒钟)的多个定时(例如100次)判定振型是否发生,将该多个定时中判定为振型发生的次数的比例作为振型的发生概率进行运算。根据该构成,针对多个定时,判定振型是否发生,将其作为振型的发生概率进行运算,因此与仅用1次定时运算振型的发生概率的情况相比能够提高精度。
需要说明的是,作为仅用1次定时运算振型的发生概率的构成,例如,可以想到将在基于相位判定振型的发生的情况下多个时间序列变动数据的几成是同相或逆相作为振型的发生概率那样的构成。即,运算部120也可以不与第二阈值进行比较,而是将表示同相或逆相的时间序列变动数据的传感器200的个数除以比传感器200的个数小1的数而得到的值(即将除去了基准数据的全体个数作为母数)乘以100作为振型的发生概率来运算。(突变振动的预兆的感测方法)
以下,对突变振动的预兆的感测方法进行说明。感测部130可以构成为例如基于运算部120运算的振型的发生概率的大小来判别是否是应感测的突变振动的预兆。
图7是表示一个实施方式的预兆感测装置300基于物理量的振幅计算出的振型发生概率的推移的一个例子的曲线图。图8是表示一个实施方式的预兆感测装置300基于物理量的相位计算出的振型发生概率的推移的一个例子的曲线图。在这些图中,横轴表示经过的时间,纵轴表示运算部120运算的振型的发生概率的大小。
如图7和图8所示,在突变振动的状态下,振型的发生概率为100%。在图7和图8中,当着眼于预兆前的振型的发生概率时,可知图7比图8低。这意味着基于振幅的运算方法比基于相位的运算方法精度高。
在此,感测部130可以在振型发生概率为第三阈值以上的情况下,将其作为突变振动的预兆进行感测。例如,在通常运转时的振型的发生概率为20%左右的情况下,第三阈值设定为40%。需要说明的是,能够根据感测误差适当变更第三阈值的大小。
在振型的发生概率大的情况下,是突变振动的预兆的可能性高。这一点,根据上述的感测方法,通过将振型的发生概率的大小与第三阈值进行比较,能够容易地感测突变振动的预兆。优选能迅速感测突变振动的预兆,因此如上所述的感测方法是有利的。
感测部130可以构成为例如基于运算部120运算的振型的发生概率的时间变化的斜率来判别是否是应感测的突变振动的预兆。感测部130可以构成为在振型的发生概率的时间变化的斜率为第四阈值以上的情况下,将其作为突变振动的预兆进行感测。例如,在通常运转时的振型的发生概率的时间变化的斜率为每秒5%以下的情况下,第四阈值设定为10%。用于计算出斜率的时间(即斜率计算中的分母)优选设定为不易受在短时间内变动的噪声的影响的程度的长度。需要说明的是,可以根据感测误差适当变更第四阈值的大小。
在振型的发生概率急剧地变大的情况下,是突变振动的预兆的可能性高。这一点,根据上述的感测方法,通过将振型的发生概率的时间变化的斜率与第四阈值进行比较,能够容易地感测突变振动的预兆。优选能迅速感测突变振动的预兆,因此如上所述的构成是有利的。
通过如上所述的感测方法,能够比突变振动的发生时间充分提前地感测突变振动。例如,如图7以及图8中虚线所示,在转变为突变振动的状态前的振型的发生概率的上升开始时间点检测出突变振动的预兆。
(预兆感测方法)
以下,参照图9对预兆感测方法的具体例子进行说明。图9是表示一个实施方式的预兆感测方法的顺序的流程图。需要说明的是,在以下说明的各个过程中,一部分或全部可以通过用户的手动来执行。此外,以下说明的预兆感测方法可以对各个过程进行适当变形,以便与上述的预兆感测装置300执行的处理对应。在以下的说明中,省略与预兆感测装置300的说明重复的说明。
如图9所示,首先,分别配置在感测对象物的多个位置的多个传感器200对各位置处的物理量进行测量(步骤S1)。从多个传感器200获取各个传感器200测量的物理量的时间序列变动数据(步骤S2)。接着,运算与感测对象物的突变振动有关的振型的发生概率(步骤S3)。具体而言,根据多个位置的各个位置处的物理量的时间序列变动数据的振幅或相位来运算振型的发生概率。在步骤S3中,基于运算的发生概率来感测突变振动的预兆(步骤S4)。
这些步骤S1~S4可以定期地重复执行。由此,能够监视突变振动的预兆。需要说明的是,在感测到突变振动的预兆的情况下,可以输出上述的规定的信号(停止信号、通知信号等)。
本发明并不限定于上述的实施方式,也包括对上述的实施方式加以变形的方式和将这些方式进行适当组合的方式。
例如,在感测对象物为压缩机的情况下,可以构成为将用于测量压力的多个传感器200配置在压缩机的多个位置,预兆感测装置300运算喘振的振型的发生概率。在感测对象物为轴流压缩机的情况下,可以构成为在其出口部的周向上配置多个传感器200,预兆感测装置300运算振型的发生概率。在感测对象物为离心压缩机的情况下,可以在环状方向上配置多个传感器200。在感测叶片振动的突变振动的预兆的情况下,可以在叶片的根部配置多个传感器200。在感测轴振动的突变振动的预兆的情况下,可以在不同轴承位置配置。
在感测对象物为蒸汽轮机的情况下,应变计也可以作为传感器200来使用。例如,可以在同一级中沿周向配置的蒸汽轮机的叶片的根部配置多个传感器200。
在感测对象物为火箭发动机的情况下,燃烧器有可能仅有一个。但是,在该情况下也可以构成为在燃烧器的出口部的周向上配置多个传感器200,预兆感测装置300检测突变振动的预兆。在感测对象物为航空器的情况下,基于预兆感测装置300的突变振动的预兆的检测方法可以适用于其发动机,也可以适用于其叶片。通过如上所述地沿模式形成的剖面的周向配置多个传感器200,能够检测各种各样的感测对象物的突变振动的预兆。
(总结)
所述各实施方式中记载的内容例如理解如下。
(1)本发明的一个实施方式的预兆感测装置(300)具备:
多个传感器(200),分别配置在感测对象物的多个位置,构成为测量各位置处的物理量;
数据获取部(110),从所述多个传感器(200)获取所述物理量的时间序列变动数据;
运算部(120),根据所述多个位置的各个位置处的所述物理量的所述时间序列变动数据的振幅或相位,运算与所述感测对象物的突变振动有关的振型的发生概率;以及
感测部(130),基于所述发生概率感测所述突变振动的预兆。
根据上述(1)所记载的构成,获取多个不同位置处的物理量(例如,根据振动而变化的压力、应变、加速度、速度、位移等物理量)的时间序列变动数据,因此能够根据它们的振幅或相位的平衡关系来运算与感测对象物的突变振动有关的振型的发生概率。此外,基于该发生概率感测突变振动的预兆,因此能够比突变振动的发生时间充分提前地感测突变振动。
(2)在一些实施方式中,在上述(1)所记载的构成中,
所述运算部(120)构成为基于所述多个位置处的所述物理量的同时刻的所述振幅来判定所述振型是否发生。
根据上述(2)所记载的构成,基于多个位置处的物理量的同时刻的振幅来判定振型是否发生,因此提高了振型的发生的判定精度。
(3)在一些实施方式中,在上述(1)或(2)所记载的构成中,
所述运算部(120)构成为在将所述多个位置处的所述物理量的同时刻的所述振幅进行归一化后进行合计,根据合计值判定所述振型是否发生。
在将多个时间序列变动数据的同时刻的振幅进行了合计的情况下,在高阶ND振型中,振幅的合计值在理论上为零,与此相对,在0ND振型中,振幅的合计值在理论上为有限值。因此,根据上述(3)所记载的构成,通过振幅的合计值来判定0ND振型是否发生,适合于感测由0ND振型引起的突变振动的情况。需要说明的是,根据基于如上所述的振幅的振型的发生的判定,有时精度比基于相位的判定高。
(4)在一些实施方式中,在上述(2)或(3)中任一个所记载的构成中,所述运算部(120)构成为在所述合计值比根据所述多个传感器的个数设定的第一阈值大的情况下,判定为所述振型发生。
根据上述(4)所记载的构成,通过与第一阈值的比较能够容易地判定有无振型(0ND振型)的发生。优选能迅速感测突变振动的预兆,因此如上所述的构成是有利的。
(5)在一些实施方式中,在上述(1)至(4)中任一个所记载的构成中,所述运算部(120)构成为搜索所述多个位置中任一个位置处的所述时间序列变动数据的所述振幅的峰值发生时刻,基于所述峰值发生时刻的所述多个位置处的所述物理量的所述振幅来判定所述振型是否发生。
振幅的峰值发生时刻是振型的发生状态容易反映在振幅上的时刻。这一点,在上述(5)所记载的构成中,在振型是否发生的判定中,使用多个位置中任一个位置(特定位置)处的时间序列变动数据的振幅的峰值发生时刻。因此,提高了判定精度。
(6)在一些实施方式中,在上述(1)至(5)中任一个所记载的构成中,所述运算部(120)构成为根据所述多个位置处的所述物理量的所述相位是否同步来判定所述振型是否发生。
根据上述(6)所记载的构成,无论是0ND振型还是高阶ND振型引起的突变振动都能够进行感测。即,与突变振动关联的振型不限于0ND振型,因此提高了通用性。
(7)在一些实施方式中,在上述(6)所记载的构成中,
所述运算部(120)构成为将从所述多个传感器(200)获取到的多个所述时间序列变动数据中的一个所述时间序列变动数据作为基准数据,针对其他的所述时间序列变动数据的各自的所述相位计算出与所述基准数据的所述相位的相位差,基于计算出的所述相位差是否在同相范围内或逆相范围内来判定所述相位是否同步。
在振型发生的情况下,物理量的时间序列变动数据的相位的同步状态建立,某个时间序列变动数据的相位与其他的时间序列变动数据的相位之间的相位差在同相范围内或逆相范围内。在上述(7)所记载的构成中,通过着眼于其相位差,能够容易地判定相位是否同步。
(8)在一些实施方式中,在上述(7)所记载的构成中,
所述运算部(120)构成为在计算出的所述相位差在同相范围内或逆相范围内的所述时间序列变动数据的个数比根据所述多个传感器(200)的个数设定的第二阈值大的情况下,判定为所述振型发生。
根据上述(8)所记载的构成,通过与第二阈值的比较能够容易地判定有无振型(0ND振型或高阶ND振型)的发生。优选能迅速感测突变振动的预兆,因此如上所述的构成是有利的。
(9)在一些实施方式中,在上述(1)至(8)中任一个所记载的构成中,
所述运算部(120)构成为在规定时间内的多个定时判定所述振型是否发生,将所述多个定时中判定为所述振型发生的次数的比例作为所述振型的发生概率进行运算。
根据上述(9)所记载的构成,针对多个定时,判定振型是否发生,将其作为振型的发生概率进行运算,因此与仅用1次定时运算振型的发生概率的情况相比能够提高精度。
(10)在一些实施方式中,在上述(1)至(9)中任一个所记载的构成中,所述感测部(130)构成为在所述运算部(120)运算的所述振型的发生概率的大小为第三阈值以上的情况下,将其作为所述突变振动的预兆进行感测。
在振型的发生概率大的情况下,是突变振动的预兆的可能性高。这一点,根据上述(10)所记载的构成,通过将振型的发生概率的大小与第三阈值进行比较能够容易地感测突变振动的预兆。优选能迅速感测突变振动的预兆,因此如上所述的构成是有利的。
(11)在一些实施方式中,在上述(1)至(10)中任一个所记载的构成中,所述感测部(130)构成为在所述运算部(120)运算的所述振型的发生概率的时间变化的斜率为第四阈值以上的情况下,将其作为所述突变振动的预兆进行感测。
在振型的发生概率急剧地变大的情况下,是突变振动的预兆的可能性高。这一点,根据上述(11)所记载的构成,通过将振型的发生概率的时间变化的斜率与第四阈值进行比较,能够容易地感测突变振动的预兆。优选能迅速感测突变振动的预兆,因此如上所述的构成是有利的。
(12)在一些实施方式中,在上述(1)至(11)中任一个所记载的构成中,所述物理量是压力、应变、加速度、速度、位移中的任意一个以上。
根据上述(12)所记载的构成,将与振型的发生的关联性高的物理量用于预兆感测,因此感测精度高。
(13)本发明的一个实施方式的预兆感测方法包括:
分别配置在感测对象物的多个位置的多个传感器(200)对各位置处的物理量进行测量的步骤;
从所述多个传感器(200)获取所述物理量的时间序列变动数据的步骤;
根据所述多个位置的各个位置处的所述物理量的所述时间序列变动数据的振幅或相位,运算与所述感测对象物的突变振动有关的振型的发生概率的步骤;以及
基于所述发生概率感测所述突变振动的预兆的步骤。
根据上述(13)所记载的方法,获取多个不同位置处的物理量(例如,根据振动而变化的压力、应变、加速度、速度、位移等物理量)的时间序列变动数据,因此能够根据它们的振幅或相位的平衡关系来运算与感测对象物的突变振动有关的振型的发生概率。此外,基于该发生概率感测突变振动的预兆,因此能够比突变振动的发生时间充分提前地感测突变振动。
附图标记说明
2内筒
3尾筒
4静叶
6动叶
7压缩机
8燃烧器
9燃料喷嘴
20燃气轮机
100运算处理装置
110数据获取部
120运算部
130感测部
140输出部
200传感器
300预兆感测装置
- 预兆感测装置以及预兆感测方法
- 触摸感测器件、包括触摸感测器件的触摸屏装置、用于感测触摸感测器件上的触摸的移动设备和方法