一种控制机械振动的方法和系统
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及对机械系统提供新的控制方法和系统,来达到减小振动的目的。使用振动控制器对驱动指令滤波处理,用经过滤波处理后的指令来驱动机械系统运动,来实现振动控制的目的。
背景技术
结构轻量化需求下,很多机械系统具有轻薄结构。典型的轻量化结构包括,梁、轴、连杆、板、绳索、薄膜。这种轻量化结构具有频率低和阻尼小的技术特点,具有持续振动现象。持续振动影响机械系统运动性能,威胁安全工作。主要振动控制方法:光滑曲线、inputshaping和闭环反馈控制。
光滑曲线在数控系统中有广泛应用。它具有低通滤波特性,利用低通滤波特性消除振动。光滑曲线优点是不需要系统动态性能先验知识,对动态过程未知的高阶复杂系统有较好应用前景。但是光滑曲线具有较长的调节时间。而且光滑曲线不能随着系统动力学行为改变而自适应的变化,具有较差的鲁棒性
美国专利4916635和5638267授权的Input shaping技术,不是利用光滑函数原理实现机器驱动,它是将输入命令与一系列脉冲的离散卷积来构造整形后的命令驱动机器运动。离散卷积构造的整形器被称作input shaper,目前比较常用的input shaper有:ZVshaper、ZVD shaper、EI shaper和SI shaper。成功地应用在工业起重机、三坐标测量机、和机器人的振动控制。input shaping构造的整形后命令一般不连续,在边界附近可能出现较大的冲击。
比较常用的反馈控制方法包括线性控制、非线性控制和智能控制。基本设计思路是将振动状态用传感器检测出来反馈形成闭环回来抑制机械振动。反馈控制成功应用于工业起重机、柔性机器人等多种领域。某些应用场合下,振动状态很难检测,限制了反馈控制实际使用。
Command smoothing技术是将原始驱动指令与一个连续函数卷积处理,来产生光滑后的命令驱动机器运动。发明专利201210507110.8和201810198149.3给出了几种Command smoothing技术方法,用于解决机械系统振动控制问题。但是这几种方法调节时间是两倍阻尼振荡周期,调节时间是固定的不可调节变化,而且两周振荡周期对很多应用来说太长。
发明内容
为克服现有技术中的上述缺陷,本发明提出一种新的控制方法和系统来为机械系统提供振动控制的解决方案。
本发明是为机械振动提供了新的控制方法,满足减振的需求。将驱动指令经过本发明提供的振动控制器进行滤波处理后,再驱动机械系统运动,可以对机械振动进行控制。
本发明可以有效地对多种类型的机械系统实现振动控制。应用本发明的技术方案,可以在保证振动控制的基础上,实现工作效率最优和操作安全的解决方案。最后给出两个具体实例来说明,使用所给出的振动控制方法可以对多种技术领域中振动控制提供解决方案。
附图说明
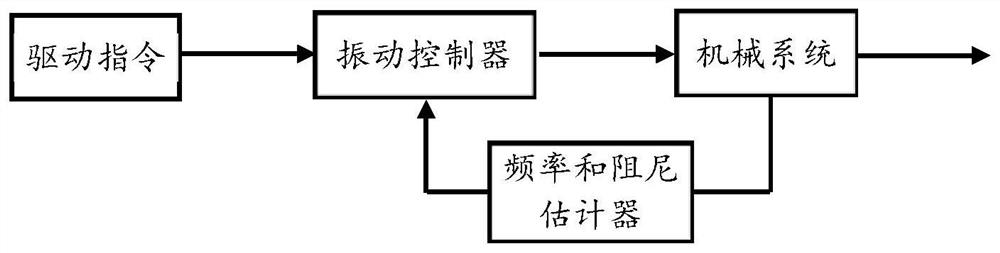
图1示单模态机械系统振动控制过程图;
图2示振动控制器的时间轮廓图;
图3示频率敏感曲线图;
图4示阻尼敏感曲线图;
图5示百分比振幅对归一化频率偏导数曲线图;
图6示多模态机械系统振动控制过程图;
图7示起重机上摆动控制实验结果图;
图8示起重机上扭转控制实验结果图;
图9示高速凸轮廓线设计过程图;
图10示高速凸轮振荡控制响应图。
如图所示,为了能明确实现本发明的实施例的结构,在图中标注了特定的结构和器件,但这仅为示意需要,并非意图将本发明限定在该特定结构、器件和环境中,根据具体需要,本领域的普通技术人员可以将这些器件和环境进行调整或者修改,所进行的调整或者修改仍然包括在后附的权利要求的范围中。
具体实施方式
下面结合附图和具体实施例对机械振动提供的控制方法和系统进行详细描述。在以下的描述中,将描述本发明的多个不同的方面,然而,对于本领域内的普通技术人员而言,可以仅仅利用本发明的一些或者全部结构或者流程来实施本发明。为了解释的明确性而言,阐述了特定的数目、配置和顺序,但是很明显,在没有这些特定细节的情况下也可以实施本发明。在其他情况下,为了不混淆本发明,对于一些众所周知的特征将不再进行详细阐述。
图1给出单模态机械系统的振动控制过程图。将驱动指令送振动控制器进行滤波处理。将滤波处理后的指令驱动机械系统运动,实现振动抑制的任务。
下面给出振动控制器的设计过程。函数c的二阶系统响应:
其中:ω为二阶系统的固有频率,ζ为二阶系统的阻尼比。对应的振幅是:
其中:
将(3)和(4)约束为零,可实现零残余振动。函数c应当还具有单位增益约束:
百分比残余振幅的表达式是:
频率鲁棒性提高可以用百分比残余振幅对归一化频率的偏导数表示:
其中,γ表示实际频率ω与设计频率ω
满足约束方程(3-8)的优化结果:
其中:
其中:π是圆周率常数;ω
公式(9)给出的函数c是本专利提出的振动控制器。它可以写成传递函数的形式:
其中:s是拉普拉斯变化的复变量。随着时间调节参数h的增大,振动控制器的调节时间逐渐增大。
图2给出公式(9)的振动控制器函数的轮廓图。轮廓由两段曲线构成,第一段是从0时刻到0.5hT时刻,第二段是从0.5T时刻到0.5(1+h)T时刻。其余时间段都是零幅值。振动控制器函数是非连续的两分段函数。
图3给出频率敏感曲线随着时间调节参数变化图。随着时间调节参数h的增大,归一化频率1两侧的斜率逐渐减小。斜率的减小表示频率敏感范围增大。
图4给出阻尼敏感曲线随着时间调节参数变化图。实际阻尼比是0.1,设计阻尼比从0到0.2范围内变化。随着时间调节参数h的增大,在阻尼比0.1两侧的斜率逐渐减小。斜率的减小表示阻尼比敏感范围增大。
图5是百分比振幅对归一化频率的偏导数曲线图。百分比振幅对归一化频率的偏导数是公式(7)。随着时间调节参数h的增大,百分比振幅对归一化频率的偏导数逐渐减小。百分比振幅对归一化频率的偏导数,对应着频率敏感曲线设计点附近的斜率。百分比振幅对归一化频率的偏导数越小,鲁棒性越好。随着时间调节参数h的增大,鲁棒性逐渐增大。
很多轻量化后的机械系统具有多个振动模态。对多模态机械系统振动控制问题,需要使用前两个模态的频率和阻尼比来分别设计两个振动控制器。图6给出多模态机械系统的振动控制过程图。使用两个振动控制器串联起来实现滤波过程。第一个模态对应的振动控制器:
其中:
ω
第二个模态对应的振动控制器:
其中:
ω
两个振动控制器串联起来使用将在前两个模态处具有陷波滤波特性,而在其他高模态具有低通滤波特性。陷波滤波特性和低通滤波特性复合体将可以抑制全部振动模态的振动。
给出第一个设计实例:起重机振荡控制来证明所提出的方法可以有效控制机械振动,保证安全运载。图7和图8中给出塔式起重机使用所提出方法实现负载摆动和扭转控制实验结果。无控制情况下,摆动偏移量振幅是82.9毫米,扭转角速度振幅是27.0度/秒。控制器作用下,摆动偏移量振幅是6.2毫米,扭转角速度振幅是7.8度/秒。在本申请提供控制器作用下,将塔式起重机振荡抑制到很小范围,可以满足安全运载需要。
本发明除了提出多单振动模态系统和多振动模态系统提供振动控制方法外,本发明专利还提出了一种适用于机械振动控制的系统,包括:输入模块、计算模块和输出模块。其中,输入模块包括模拟信号或者数字信号采集装置,功能是对输入信号进行采集;计算模块,连接到采集模块,用于将采集到的输入信号根据所提供的方法进行数据处理;输出模块,连接到计算模块,用于将经过滤波处理后的指令驱动机械系统运动,包括信号调理转换装置、模拟信号或者数字信号输出装置。这种振动控制系统使用电控方式来工程实现,内置于工业起重机电控系统内。
给出第二个设计实例:高速凸轮设计来证明所提出方法可以有效控制从动件振动。给定凸轮转速比λ后,可以计算出凸轮上升时间t
其中,ω
图9给出高速凸轮设计过程。凸轮基线函数将与k个振动控制器(时间调节系数h
当使用传统的3-4-5多项式来设计凸轮廓线,用来高速转动从动件。图10给出使用3-4-5作为凸轮廓线来驱动从动件响应结果,可以看出存在较大的振幅。当使用图9和上述所述用振动控制器来设计高速凸轮。经过振动控制器处理后的廓线来高速驱动从动件,获得非常小的振幅。
将传统的凸轮廓线,例如3-4-5或4-5-6-7多项式,作为基线。将该基线与所提出振动控制器进行卷积出来,来获得满足设计转速比要求的廓线。可以满足高速转动下,从动件振幅很小的要求。
本发明提供振动控制系统不仅可以通过电控方式工程实现,还可以通过机械廓线设计来工程实现。选择多项式凸轮廓线,然后选择k个振动控制器(h1=1)和1个振动控制器(h
最后需要陈述的是,以上实施例仅用以描述本发明的技术方案而不是对本技术方法进行限制,本发明在应用上可以延伸为其他的修改、变化、应用和实施例,并且因此认为所有这样的修改、变化、应用、实施例都在本发明的精神和教导范围内。
- 一种控制机械振动的方法和系统
- 一种机械振动试验台控制系统及其控制装置