用于获知车桥负荷的方法和用于车辆的悬架系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及用于获知车桥负荷的方法和用于车辆的悬架系统,该悬架系统特别适合于实施该方法。
背景技术
获知车桥负荷特别是被用于获知装载状态、负荷分配和整车重量。所获知的车桥负荷可以被考虑用于调节制动过程或车辆动态调节。也可以防止车辆过载,过载可能导致损坏车辆和道路并且明显延长了制动距离。
一方面,用于车辆的悬架系统可以借助空气弹簧或空气气囊来构造,也就是说被气动式地构成,但这是相对昂贵的。空气弹簧能够实现测量其气压用以获知起作用的车桥负荷,并且也能够实现主动改变水平调整和起作用的车桥负荷。车桥负荷也可以通过测量车身相对于底盘之间的间距来获知。
此外,具有金属板簧的悬架系统是已知的,这些金属板簧通常以其端部接驳在车身上并且在其中央区域中放置或容纳在底盘、特别是底盘的刚性车桥上。这种具有板簧的悬挂系统通常相对便宜;但特别是由于出现的滞后特性而导致不准确获知车桥负荷而通常被认为是不利的。
一方面,板簧可以被构造成具有一个或多个簧片(弹簧层)的抛物线弹簧,这些簧片在它们的端部上接驳在车身上。此外,已知的是,将板簧作为具有多个弹簧层的梯形弹簧,特别是具有不同长度簧片的梯形弹簧,这些簧片例如串接或串列在中央心状栓上并且在它们的端部上例如经由保持夹保持在一起。这样的梯形弹簧可以具有特别是累进的弹簧特性曲线,其因此在小压缩的情况下首先能实现软弹动或小的弹性模量,而在较大的弹簧行程或者说较大压缩的情况下能够实现较大的弹性模量。梯形弹簧尤其具有明显的阻尼行为,这是因为多个弹簧层或者说簧片相互摩擦,并且由此可以吸收动能。
然而事实证明,对于这种梯形弹簧,确定车桥负荷是有问题的。因此,通常借助附加的应变计只能不准确或很困难地直接获知力或车桥负荷,或者需要对悬架系统进行干预以便安装相应的、直接显示车桥负荷的测量装置。
EP 1 571 429 B1公开了一种用于在具有空气悬架的车身中显示车辆的车桥负荷的设备。
US 6,590,168 B2描述了一种测量设备,该测量设备测量车桥的偏转角并且由此获知车桥负荷。
EP 1 604 179 B1描述了一种用于具有空气气囊支撑系统的车辆的车桥负荷检测系统,其通过使用压力传感器来测量空气气囊中的压力。
GB 1479192 A描述了一种滞后修正,在其中在重量的所预先确定的上和下值之间设置有范围,并且将新获知的值与先前的重量值和由于滞后引起的偏差进行比较。
发明内容
本发明的任务是,提出一种悬架系统和一种用于获知车桥负荷的方法,它们能够以相对小的耗费实现相对可靠地确定或估计车桥负荷。
该任务通过根据独立权利要求的方法和悬挂系统来解决。从属权利要求描述了优选的改进方案。
根据本发明的方法特别是被设置成用于根据本发明的悬架系统;根据本发明的弹簧系统特别是被设置成用于执行根据本发明的方法。
因此,利用根据本发明的方法和根据本发明的悬架系统获知了车桥负荷投影值或车桥负荷参考值,其随后可以被更新并且可以在车辆的各种系统中被作为车桥负荷的值来使用;也就是说,所获知的车桥负荷投影值因此表示当前获知的车桥负荷或者说表示从可用数据经投影得到的车桥负荷。
本发明特别是基于以下构思:在装载或卸载过程期间(在该过程中因此板簧的压缩状态或者说压缩行程发生变化)测量车身相对于底盘之间的测量间距,该测量间距本身首先受到滞后效应的影响。随后,通过获知车桥负荷投影值或车桥负荷参考值,能够从该测量间距实现对当前的车桥负荷进行消除滞后的预测或估计。由于在装载或卸载过程期间能标称式获知的车桥负荷由于滞后而有误,因此基于存储的和/或学习得到的滞后区域从直接测得的测量间距首先获知车桥负荷投影值。只有在被压紧的板簧“不晃动”(其可以经由为此设置的第二个准则来确认)之后,板簧才会出现真实的压缩行程,然后可以通过测量测量间距直接使用该压缩行程,并且一方面可以将其用作新的或经修正的车桥负荷投影值,并且还可以将其用于评价或修正滞后线。
因此,测得车身相对于底盘之间的测量间距。该测量间距尤其可以通过设置在车身上的测量装置来获知,该测量装置获知与底盘的测量间距。在此,特别是可以获知与底盘的将两个车轮连接起来的刚性车桥的测量间距。然而,也能获知在车身的与底盘的其他参考变量之间的测量间距。
间距测量装置一方面可以例如经由能枢转的杆或其他的调节装置机械式测量测量间距或长度,并且例如可以检测作为测量角度或测量长度的测量变量。也能使用非接触式测量装置,例如超声波传感器。在此,本发明的优点在于,可以使用空气悬架系统中已知的廉价的间距测量装置。
随后,由测得的测量间距利用滞后区域的经存储的和/或学习得到的值获知当前的车桥负荷投影值或车桥负荷参考值。为此,首先获知的是:是否存在装载过程或卸载过程,并且然后根据该评价获知所存储的滞后区域的合适的滞后线,然后使用该滞后线。
根据本发明按照有利方式应用的是,板簧的压缩和回弹过程通常可以通过理想的弹簧特性曲线来表示,这些理想的弹簧特性曲线描述了弹性的、可逆的压缩和回弹过程。在此识别出,在车辆中在满足了张弛准则(第二准则)时也到达了或者非常近似地到达了弹簧特性曲线,该弹簧特性曲线例如通过测量间距和车桥负荷的值对来表示,从而可以应用理想的弹簧特性曲线。第二准则尤其可以表明,车辆事先驶过的路程中通过振动以及小的压缩和回弹过程补偿或消除了弹簧片或弹簧层之间的应力和摩擦力。因此,在例如行驶时间足够和/或行驶距离足够的行驶之后,必要时在满足另外的诸如足够的最小速度的条件之后,则可以从理想的弹簧特性曲线上的起始点出发。因此特别是可以随后识别出装载过程或卸载过程,为此按照有利方式补充地设置有第一准则(装卸过程准则),该第一准则例如指示车辆停止状态,或者在通过驾驶员输入相应的信号时可以被满足。
因此,控制和分析装置识别出:随后将从理想的弹簧特性曲线上的一个点出发执行车桥负荷的变化,其中,随后基于测量信号识别出:测量间距是否增大,这于是例如可以被识别为压缩和装载过程;或者相应地测量间距是否减小,这可以被识别为回弹或卸载过程。
因此,根据本发明按照有利方式应用的是,从理想的弹簧特性曲线出发,通过滞后区域的滞后线,尤其是预先存储的和/或学习得到的滞后线,可以很好地或以足够精度模拟该压缩过程或回弹过程,并且因此可以将测量间距的随后测得的变化配属给当前的车桥负荷值投影值,该当前的车桥负荷值投影值因此随后可以被用作当前的车桥负荷,尤其是来用于调节和控制。
按照有利方式,更新所获知的车桥负荷投影值并且也更新滞后区域,其方式是:首先重置第二准则并且随后检查:是否紧接着又满足该第二准则,即例如存在车辆的足以导致解决板簧的内应力的行驶。于是可以再次应用的是,再次达到理想的弹簧特性曲线上的一个点。如果这被满足,则可以直接经由当前测得的测量间距和理想的弹簧特性曲线以高精度获知当前的车桥负荷投影值,因此,将当前的车桥负荷投影值代替先前估计的车桥负荷投影值,即基于在装载过程或卸载过程中的滞后而获知的车桥负荷投影值。随后,可以将当前经修正的车桥负荷投影值与先前基于在装载过程或卸载过程中的滞后而获知的车桥负荷投影值之间的偏差用作修正偏差,用以修正滞后区域的整个滞后线,这是因为可以应用的是,在行驶期间起作用的车桥负荷没有变化,并且因此所获知的车桥负荷投影值的变化来自于最后采用的滞后线的误差。特别是可以基于该获知的偏差来修正整个滞后区域。
因此,除了当前获知车桥负荷投影值之外,还可以持续地修正和更新滞后区域。
因此,根据本发明获知的车桥负荷投影值对应于当前获知的车桥负荷,或者说车桥负荷根据本发明可以被投影或估计为车桥负荷投影值,从而将合适的车桥负荷的值用于调节和控制方法。
滞后区域一方面可以具有仅唯一的第一(靠上的)滞后线,这表示基于空车的装载过程。此外,滞后区域还可以具有多个针对装载过程的第一(靠上的)滞后线,例如作为滞后线的集或场,它们代表针对基于起始值或起始车桥负荷例如在先前是能部分装载的车辆的情况下或由于其他原因,例如车身、油箱加注等所造成不同的装载过程的滞后线。相应地,可以存储多个针对卸载过程的第二(靠下的)滞后线。
从测量值,一方面可以通过对多个测量值的插值来获知滞后线,或者也可以基于数学模型通过评估n次多项式来获知滞后线。
附图说明
下面参考实施例的附图更详细地阐述本发明。其中:
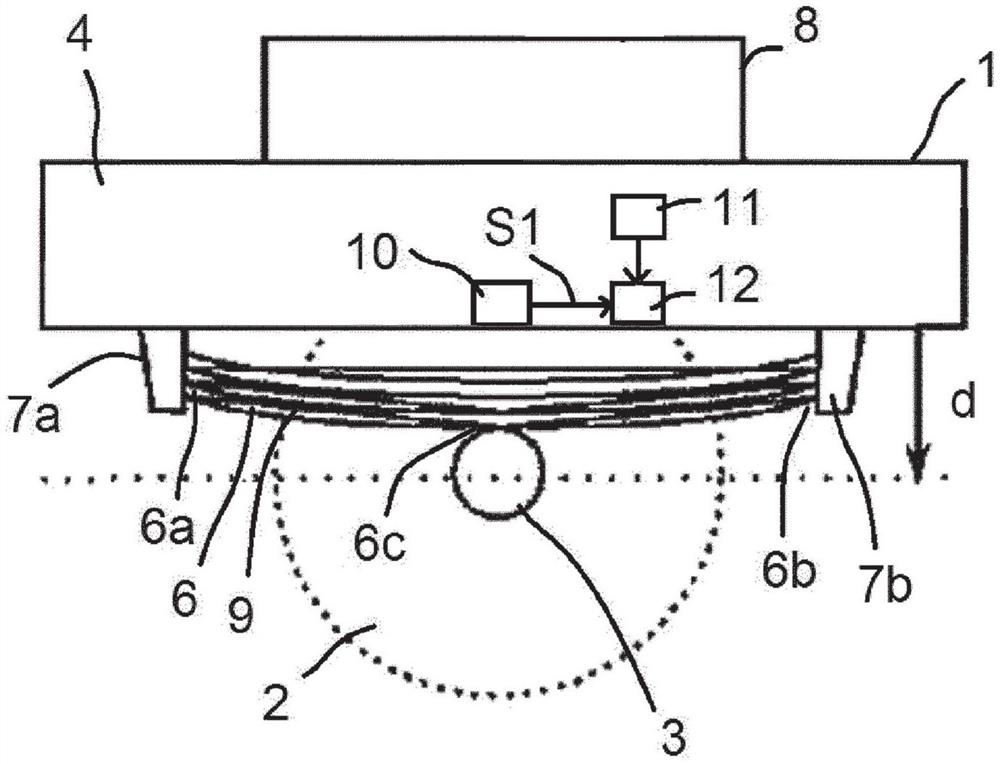
图1示出具有片簧的车辆车桥悬架;
图2示出具有表示压缩过程(装载过程)的特性曲线族;
图3示出具有表示回弹过程(卸载过程)的特性曲线族;
图4示出在车辆被部分装载时获知压缩过程时的特性曲线族;
图5a、b、c示出获知或重新计算特性曲线族的滞后曲线的步骤;
图6示出根据本发明的方法的流程图表。
具体实施方式
图1示出了具有车轮2的车辆1的、特别是商用车的车桥悬架的区域,其中,车轮2安装在共同的刚性车桥3上。车身4借助具有两个侧向板簧6的悬架系统5相对于刚性车桥3弹动。在图1的侧视图中,可以相应地看到一个车轮2和一个板簧6。
板簧6在其前端和后端6a、6b上容纳在车身4的弹簧容纳部7a、7b中,并且在其中央区域6c中容纳在刚性车桥3上,即被放置到刚性车桥3上并且固定在其上。因此,车身4的竖直运动导致板簧6的压缩和回弹,也就是说,车身4相对于刚性车桥3的测量间距d发生改变。在压缩过程中,例如在行驶经过地面隆起部时,车身4朝着刚性车桥3方向移位,也就是说,测量间距d随着板簧6的弹性变形而减小,该板簧因此在其中央区域6c中被向上挤压。
测量间距d还尤其表现出与载重8相关性,该载重根据图1象征性地容纳在车身4上。在多车桥车辆的情况下,通常也必须考虑载重8的车桥负荷分配。
根据图1所示的实施例,板簧6被构造为弹簧层9的堆垛,也就是说,多个弹簧层9彼此层叠。当板簧6被构造为梯形弹簧时,弹簧层9为此通常被以不同的长度构成,并且分别具有中心孔,共同的所谓的心状栓穿过该中心孔。此外,弹簧层9通过夹具保持在一起。此外,板簧6原则上也可以被构造为具有弹簧层9或弹簧层的堆垛的抛物线弹簧。
特别是当板簧6被构造为具有不同长度的弹簧层9的梯形弹簧时,可以有利地实施根据本发明的方法,这是因为下面描述的滞后效应或阻尼特性是特别重要的。
测量间距d通过间距测量装置10测量,该间距测量装置被构造成与车身4和刚性车桥3接触的机械式行程传感器,或者被构造成非接触式间距测量传感器,例如超声波传感器,例如它原则上也可以设置在气动的悬挂系统中。间距测量装置10将间距测量信号S1提供给控制和分析装置12,控制和分析装置将测量数据和由此计算出的数据储存在内部或外部存储器11中。
因此,测量间距d与车桥负荷AL有关。然而,梯形弹簧6尤其表现出如图2至3所示且尤其与弹簧层9之间的内部摩擦有关的滞后行为。在图2中,测量间距d相对于车桥负荷AL来绘制。在理想的弹簧特性曲线KL的情况下,随着车桥负荷AL的增加,测量间距d相应地下降,其中,通常存在非线性的弹簧特性曲线,特别是在由具有不同长度的弹簧层构成的堆垛的情况下,尤其是存在累进的弹簧特性曲线。然而,由于弹簧层9之间的摩擦,使得测量间距d的位移并不遵循理想的弹簧特性曲线KL,而是会通过滞后区域14来再现,该滞后区域可以表现为滞后线集Hyi,其中i=1、2、3、……,即Hy1、Hy2、Hy3、……:在这里,图2显示了最初的装载过程,即压缩过程:
当满足第一准则或装卸过程准则K1时,发生装载或卸载过程。这尤其可以设置,车辆1是静止的,即v=0。此外优选地,作为装载过程的条件设置的是,车桥负荷AL增加,即,测得测量间距d减少。滞后区域14优选地由事先的测量获知,并且储存在存储装置11中,例如作为滞后线集Hy1、Hy2、……,其中,滞后线Hy1、Hy2、……又可以存储为获知的数学函数,例如多项式,或者也可以为值对(d,AL),其中,于是当前相应地形成在这些值对之间的插值。
装载过程从起始装载点B1开始,因此该起始装载点被指定为值对(d_B1,AL_B1)。通常,设置有第二准则或张弛准则K2,其指示当前已经达到理想的弹簧特性曲线KL上的点;第二准则表示车辆1事先已经行驶了足够的路程。在随后的装载过程中,应用沿着第一(靠上的)滞后线Hy1的连续的装载点B2、B3、B4直至例如B7,其中,例如B7表示完全装载,从而装载过程结束。滞后线Hy1由在装载过程中在弹簧层9之间的摩擦力来限定。摩擦力抵制了板簧6的变弯,在变弯中板簧9在压力负荷的作用下朝向彼此地移位,从而构成较小的测量间距d、其中,在这里形成拱曲的滞后线Hy1,它可以相应地被测得成值对(d_B1,AL_B1)、(d_B2,AL_B2)、……。.
由于滞后区域14被预先存储,因此在从B1开始的后续发生的压缩过程中,基于第一滞后线Hy1,可以将当前测得的测量间距d、例如测量间距值d_B2直接基于d_B2获知当前的车桥负荷投影值AL_B2。因此,可以避免或最小化由于使用理想的弹簧特性曲线KL所导致的误差。
因此,使得无法直接测得的车桥负荷被投影得到,并且获知车桥负荷投影值,也就是说根据示意图借助滞后线作为横坐标上的值获知车桥负荷投影值。
图3示出了卸载过程,其中,经过针对卸载过程的第二(靠下的)滞后线Hy2。车辆1再次事先满足第二准则K2,从而板簧6的内部摩擦力和应力已被大大减小。因此,初始卸载点E1以高精度地位于理想的弹簧特性曲线线KL上。在随后的卸载过程中,再次并不经过理想的弹簧特性曲线KL,而是经过了由E1规定的具有点E1、E2、E3直至E7的靠下的滞后线Hy2,其位于弹簧特性曲线KL之下。
因此,图2和图3示出了具有滞后线Hy1和Hy2的特性曲线族14,其特别是可以表示出对空的车辆1装载情况和对满载的车辆1的卸载情况。基于满载的车辆1的最靠上的第一滞后线Hy1和最靠下的第二滞后线Hy2作为包络线限定和/或限界出滞后区域14,并且与理想的弹簧特性曲线一起形成三个包络线。
因此,各自的滞后线的特征在于均具有起始装载点B1的车桥负荷值AL,然而该车桥负荷值原则上也可以变化。因此,可以在车辆上进行变动以改变载重8的总质量。然而特别地,车辆也可以被部分卸载和部分装载,从而选择不同的起始装载点B1和不同的初始卸载点E1,它们随后分别构成不同的靠上和靠下的滞后线Hy1、Hy2。这在图4中示出,在那里例如在长途行驶之后,即在满足第二准则K2之后,使用第一准则K1并且因此特别是对测量间距dx的变化进行检查。因此,在这里获知测量间距dx的减少,该减少对应于车桥负荷的增加,即装载过程。因此,在这里可以选择具有车桥负荷投影值Ax的起始装载点Bx,该起始装载点从dx出发位于弹簧特性曲线KL上,并且例如通过对测量值进行插值和/或提供n次多项式,可以选择从Bx出发的滞后线Hy3。
因此,已经能够实现可靠地确定车桥负荷,其方式是:通过选定相关的起始装载点B1或起始卸载点E1从滞后区域14限定出相关的滞后线Hy1、Hy2、Hyx、……。因此,在获知作为车桥负荷投影值的车桥负荷AL时,无需首先重新计算理想的弹簧特性曲线KL,而是可以直接基于滞后区域14来确定当前的车桥负荷投影值AL-RV或Ax。
由于滞后区域14随时间动态地变化,特别是由于老化或材料疲劳、腐蚀、界面变化进而是弹簧层9之间的摩擦力变化所导致,因此根据优选的构造方案,滞后区域14被持续更新。这在图5a至5c中以示例的方式示出:
在起始时间点,滞后区域14被存储。在满足准则K2的行驶之后再次对车辆进行装载,从而可以应用起始装载点B1,该起始装载点可以从当前测得的测量间距值d_B1和弹簧特性曲线KL直接获知。由于滞后行为变化,使得装载实际上沿着虚线Hy_新进行,直至例如在装卸过程中达到第二个装载点B2。由于滞后线Hy1已过时或有误差,使得测得的测量间距值d_B2被错误地配属给点B2_旧、并且因此获知了车桥负荷投影值AL_B2_旧。
随后,在开始行驶时第二准则K2被重置,在开始行驶时通常可以假定载重8不再变化。在完成再次满足第二准则K2的行驶之后,因此又达到了理想的弹簧特性曲线KL,并且因此根据图5b(在车桥负荷AL不改变的情况下)达到了点B3。因此,随后测得了测量间距值d_B3,而不是测得先前错误地获知的测量间距值d_B2_旧。由此,一方面可以定性地识别出误差,并且可以基于当前测得的测量间距值d_B3和已知的理想的弹簧特性曲线KL来修正当前的车桥负荷投影值AL-RV。此外,根据图5c,可以匹配滞后区域14并且可以修正与装载过程有关的滞后线Hy1,即根据图5c直观地向上挪移到所获知的值。
在此,可以从一个或多个获知的装载点B2规定新的、经修正的滞后线Hy1。原则上,这些新的、经修正的滞后线可以从起始装载点B1和另外的装载点B2数学上通过合适的n次多项式来获知。
因此,图6示出了根据一个实施方式的用于获知作为车桥负荷的车桥负荷投影值的方法的流程图表:
在步骤St0中的开始之后,随后在步骤St1中检查:是否满足第二准则K2,即是否满足K2=1,例如通过比较自上次装载过程或卸载过程以来已执行的行驶。特别是可以检查:
行驶时间(Δ_t)是否大于最小行驶时间(min_Δ_t)和/或
行驶距离(Δ_s)是否大于最小行驶距离(min:Δ_s)。
在此可以设置,行驶时间或行驶距离在唯一一次行驶中都被满足,或者也允许是多次相继执行的行驶的情况。
如有必要,还可以例如补充地检查:在行驶期间是否遵循最低速度。
如果不满足K2,则该方法返回步骤St1之前重置;如果满足K2,则可以识别出:理想的弹簧特性曲线KL可以被用于针对车桥负荷随后变化的起始点。
在步骤St2中,随后测得测量间距值d_B1,并且由此借助理想的弹簧特性曲线KL获知点B1为当前的值对(d_B1,AL_B1),由此获知当前的车桥负荷投影值AL_B1。
随后,根据步骤St3检查:是否满足第一准则K1或装卸过程准则K1,即是否存在装载或卸载过程,对此例如可以检查:
是否行驶速度v=0,
测量间距d的变化是否大于最小值d_min,其中,d_min允许小的波动,
和/或,可能还需要驾驶员的输入信号。
此外,已经可以将在装载过程与卸载过程之间的区别设置为第一准则K1的一部分,即d是增加还是减少。
在当前情况下,测得d减少,从而在步骤St3中可以推断出是装载过程。因此,在步骤St4中可以使用通过B1和滞后场14规定的靠上的滞后线Hy1。另一方面,如果获知是卸载过程,即d增加,则使用靠下的滞后线Hy2。
随后,在步骤St5中,在装载过程结束时,测得新的测量间距d2,从新的测量间距基于滞后线Hy1获知当前的车桥负荷投影值AL_B2。该当前的车桥负荷投影值AL_B2随后可以被显示或被用于包括有车桥负荷AL的行驶动态调节,即,特别是用于通过驱控气动弹簧来调节车桥负荷分配、用于制动以及用于稳定过程。因为装载过程是在构成板簧6的滞后行为的情况下进行的,所以不再满足第二准则K2,从而可以在步骤St6中重置K2,即K2=0。
随后,在步骤St7中,例如在短途行驶之后,再次满足第二准则K2,即K2=1,因此可以假设板簧6的行为再次遵循理想的弹簧特性曲线KL。测得当前的测量间距d、并且一方面基于弹簧线KL来获知修正后的车桥负荷投影值AL-RV。此外,在步骤St8中,随后根据图5c)修正滞后区域14,获知新的滞后线Hy1并且将其存储在存储装置11中,于是将该方法返回到步骤St1之前。
附图标记列表
1 车辆、特别是商用车
2 车轮
3 底盘、特别是刚性车桥
4 车身
5 悬架系统
6 板簧
6a、b 板簧6的侧向端部
6c 板簧6的中央区域
7a、b 弹簧容纳部
d 间距、测量间距
8 载重
9 簧片、板簧6的弹簧层
10 间距测量装置
11 存储装置
12 控制和分析装置
14 滞后区域
S1 间距测量信号
d_B1、d_B2、d_B3… 在装载点B1、B2、B3……处的测量间距值
AL 车桥负荷
AL-RV、AL_B2_旧 车桥负荷-投影值
KL 理想的弹簧特征曲线
K1 第一准则、装卸过程准则
K2 第二准则、张弛过程准则
Hy1、Hy2、Hy3、Hy_新 滞后区域14的滞后线
B1起始装载点
B2、B3、B4、……、B7 第一滞后线Hy1上的另外的装载点
E1 起始卸载点
E2、E3、……、E7 第二滞后线Hy2上的另外的卸载点
St0至St8 方法步骤。
- 用于获知车桥负荷的方法和用于车辆的悬架系统
- 用于获知机械和/或气动/液压悬挂的车辆上的车桥负荷的方法及其设备