一种激光扫描装置和激光扫描方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及激光应用技术领域,尤其涉及一种激光扫描装置和激光扫描方法。
背景技术
激光扫描,因为具有远距离的精确检测性能,在非接触性的距离测量领域得到广泛应用。当激光扫描的作用对象为运动状态时,作用点的运动速度会对激光扫描产生很大影响。当负载与作用点之间的垂直高度较小时,作用点很小的移动距离,会造成负载的俯仰速度变化非常大。
在二维云台或转台中,当作用点是地面或者水平面上匀速运动时,对高度较低的二维云台或转台来说,传动控制更加困难,因此需要一种高精度云台来负载激光扫描仪以便于随动扫描作用对象。
发明内容
本发明的目的在于提供一种激光扫描装置和激光扫描方法,以解决云台负载的作用点在某一平面内的匀速运动的问题。
为达此目的,本发明采用以下技术方案:
一种激光扫描装置,包括激光扫描组件和云台组件,所述激光扫描组件可拆卸式连接于所述云台组件;所述云台组件包括:
U型支架,所述U型支架开口向上设置,所述U型支架的底板上设有中间立板,所述中间立板设于两个侧板之间;
第一蜗轮蜗杆减速机,所述第一蜗轮蜗杆减速机固定在所述U型支架上且所述第一蜗轮蜗杆减速机的输出轴向下穿设所述U型支架的所述底板并固定连接底座,所述第一蜗轮蜗杆减速机的输入轴设有第一同步带轮;
第一执行模块,固定在所述U型支架上,所述第一执行模块的输出轴设有第二同步带轮,第一同步带套装在所述第一同步带轮和所述第二同步带轮上以将所述第一执行模块的输出传动连接给所述第一蜗轮蜗杆减速机;
第二蜗轮蜗杆减速机,固定在所述U型支架上,所述第二蜗轮蜗杆减速机的输入轴设有第三同步带轮;所述第二蜗轮蜗杆减速机的输出轴设有俯仰臂,所述俯仰臂转动连接于所述中间立板,所述激光扫描组件固定连接于所述俯仰臂上;
第二执行模块,固定在所述U型支架上,所述第二执行模块的输出端设有第四同步带轮,第二同步带套装在所述第三同步带轮和所述第四同步带轮上以将所述第二执行模块的输出传动连接给所述第二蜗轮蜗杆减速机;
主控板,固定在所述U型支架上且分别电连接所述第一蜗轮蜗杆减速机、第一执行模块、第二蜗轮蜗杆减速机和第二执行模块以供电和发送控制信号。
可选地,所述云台组件还包括罩体,所述罩体上设有第一安装孔,所述罩体罩设在所述U型支架上并与所述U型支架的两个所述侧板形成容置空间,所述俯仰臂穿设所述罩体上的所述第一安装孔以连接所述激光扫描组件。
可选地,所述激光扫描组件包括:
激光器,所述激光器设有多个;
基座,所述基座包括本体,所述本体的一端设有多个固定孔,多个所述固定孔间隔分布,每个所述固定孔内均设有一个激光器;
所述基座还包括第一压圈和第二压圈,所述第一压圈上设有多个可视窗口,多个所述可视窗口与多个所述固定孔的位置一一对应设置,所述第一压圈固定在所述本体的一端并压紧固定所述激光器,多个所述激光器与多个所述可视窗口的位置一一对应;所述第二压圈固定在所述本体的另一端,并通过多个支柱止抵于所述激光器的末端。
可选地,所述激光扫描组件还包括压板,所述压板设有多个,每个所述压板压接在至少两个所述激光器的末端并固定在所述本体上,所述支柱的两端分别止抵于所述压板和所述第二压圈上。
可选地,所述第一执行模块包括:
第一电机,所述第一电机的输出轴上设有所述第二同步带轮,所述第二同步带轮与所述第一电机的所述输出轴之间平键连接,所述第一电机通过第一连接板固定在所述U型支架上;
第一编码器,所述第一编码器通过第一转接板固定连接于所述第一电机上,所述第一编码器电连接与所述主控板。
可选地,所述第二执行模块包括:
第二连接板,所述第二连接板为L型板,所述第二连接板的水平面固定连接于所述U型支架的所述底板,所述第二连接板的竖直板上开设有第二安装孔和第三安装孔;
第二电机,所述第二电机的输出轴上设有第五同步带轮,所述第五同步带轮与所述第二电机的所述输出轴之间平键连接,所述第二电机的所述输出轴穿设在所述第二安装孔内且所述第二电机固定连接于所述第二连接板;
第二编码器,所述第二编码器通过第二转接板固定连接于所述第二电机上,所述第二编码器电连接于所述主控板;
转轴,所述转轴穿设在所述第三安装孔内并转动连接,所述转轴与所述第二电机的所述输出轴相互平行且位于所述第二连接板的同一侧,所述转轴上依次固定连接第六同步带轮和所述第四同步带轮,第三同步带套装在所述第五同步带轮和所述第六同步带轮上以传动连接。
可选地,所述第一同步带轮和所述第三同步带轮的型号为S3M-48,所述第二同步带轮、所述第四同步带轮和所述第五同步带轮的型号为S3M-15,所述第六同步带轮的型号为S3M-60。
可选地,所述第一电机和所述第二电机均为步进电机,采用16细分控制芯片。
可选地,所述第五同步带轮和所述第六同步带轮之间的传动比为4,所述第四同步带轮和所述第六同步带轮之间的传动比为3.2,所述第二蜗轮蜗杆减速机的传动比为20;所述第一同步带轮和所述第二同步带轮之间的传动比为3.2,所述第一蜗轮蜗杆减速机的传动比为40。
本发明还提供一种激光扫描方法,设所述激光扫描装置位于B点,C点为B点在地面或作用面的投射点,所述激光扫描方法控制所述激光作用点的匀速运动,包括如下步骤:
S1,将激光扫描组件连接于云台组件,所述激光扫描组件的高度为h,所述激光作用点运动t时间,运动距离为L(t),则有:
L(t)=htan[θ(t)] (1)
式中,θ(t)为t时刻所述激光作用点的俯仰角;
对式(1)求t的导数,则有:
所述激光作用点的运动速度v为:
则式(2)改写为:
对式(4)求以0~t为边界的定积分,则有:
根据泰勒级数,则有:
S2,第一执行模块和第一蜗轮蜗杆减速机进行方位传动,所述激光作用点的方位转速ω为:
式中,i
S3,第二执行模块和第二蜗轮蜗杆减速机进行俯仰传动,得到所述激光作用点的所述俯仰角θ(t),为:
式中,n
本发明的有益效果:
本发明的一种激光扫描装置,通过在云台组件设置第一蜗轮蜗杆减速机和第一执行模块能够进行方位传动,通过设置第二蜗轮蜗杆减速机和第二执行模块能够进行俯仰传动,从而实现对激光作用点在地面和某平面上匀速运动控制,且激光作用点为激光组阵列,可起到激光光束扫描的效果,尤其适用于负载高度较低的情况。
本发明的一种激光扫描方法,通过在云台组件上设置激光扫描组件,通过激光扫描组件的方位二级传动和俯仰三级传动,控制激光作用点在地面和某平面上的方位转速ω和俯仰角θ(t),且其作用点为激光组阵列,可起到激光光束扫描的效果,实现对激光作用点在地面和某平面上匀速运动控制,尤其适用于负载高度较低的情况。
附图说明
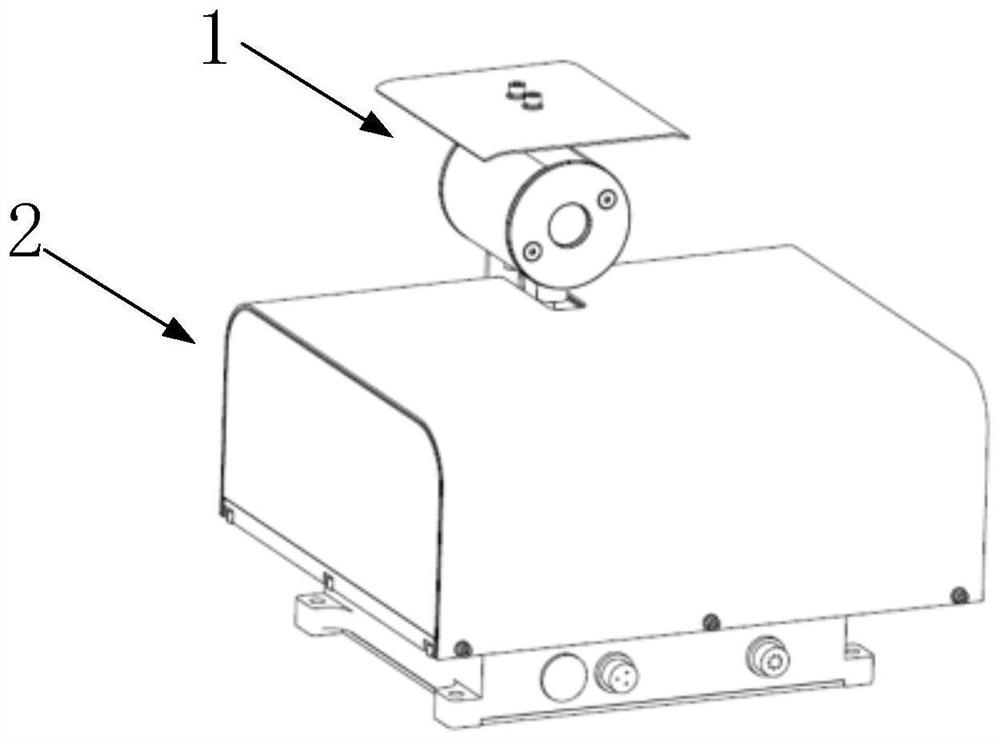
图1是本发明的一种激光扫描装置的整体结构示意图;
图2是本发明的一种激光扫描装置中云台组件(去掉罩体)的结构俯视图;
图3是本发明的一种激光扫描装置中云台组件(去掉罩体)的整体结构示意图;
图4是本发明的一种激光扫描装置中云台组件的爆炸图;
图5是本发明的一种激光扫描装置中激光扫描组件中激光器呈圆环形阵列分布示意图;
图6是本发明的一种激光扫描装置中激光扫描组件中激光器呈矩形阵列分布示意图;
图7是本发明的一种激光扫描装置中激光扫描组件的爆炸图;
图8是本发明的一种激光扫描装置中第二执行模块的爆炸图;
图9是本发明的一种激光扫描方法的原理示意图。
图中:
1.激光扫描组件;11.激光器;12.基座;121.本体;1211.固定孔;122.第一压圈;1221.可视窗口;123.第二压圈;124.支柱;125.压板;13.遮阳罩;
2.云台组件;
21.U型支架;211.底板;212.中间立板;213.侧板;
22.第一蜗轮蜗杆减速机;221.第一同步带轮;
23.第一执行模块;231.第二同步带轮;232.第一同步带;233.第一电机;234.第一编码器;235.第一连接板;
24.第二蜗轮蜗杆减速机;241.第三同步带轮;242.俯仰臂;
25.第二执行模块;251.第四同步带轮;252.第二同步带;253.第二连接板;2531.第二安装孔;2532.第三安装孔;254.第二电机;255.第二编码器;256.转轴;2561.轴承;257.第五同步带轮;258.第六同步带轮;259.第三同步带;26.主控板;27.底座;28.罩体;281.第一安装孔。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以视具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。术语“多个”应该理解为两个以上。
本发明提供一种激光扫描装置,如图1所示,包括激光扫描组件1和云台组件2,激光扫描组件1可拆卸式连接于云台组件2,便于更换不同的激光扫描组件1;如图3所示,云台组件2包括U型支架21、第一蜗轮蜗杆减速机22、第一执行模块23、第二蜗轮蜗杆减速机24、第二执行模块25和主控板26,其中,U型支架21如图4所示,U型支架21开口向上设置,U型支架21的底板211上设有中间立板212,中间立板212设于两个侧板213之间;需要说明的是,中间立板212的宽度小于底板211的宽度,让位于第一蜗轮蜗杆减速机22。第一蜗轮蜗杆减速机22固定在U型支架21上且第一蜗轮蜗杆减速机22的输出轴向下穿设U型支架21的底板211并连接固定底座27,第一蜗轮蜗杆减速机22的输入轴设有第一同步带轮221;第一执行模块23固定在U型支架21上,第一执行模块23的输出轴设有第二同步带轮231,如图2和图4所示,第一同步带232套装在第一同步带轮221和第二同步带轮231上以将第一执行模块23的输出传动连接给第一蜗轮蜗杆减速机22;第二蜗轮蜗杆减速机24固定在U型支架21上,第二蜗轮蜗杆减速机24的输入轴设有第三同步带轮241;第二蜗轮蜗杆减速机24的输出轴设有俯仰臂242,俯仰臂242转动连接于中间立板212,激光扫描组件1固定连接于俯仰臂242上;第二执行模块25固定在U型支架21上,如图2所示,第二执行模块25的输出端设有第四同步带轮251,第二同步带252套装在第三同步带轮241和第四同步带轮251上以将第二执行模块25的输出传动连接给第二蜗轮蜗杆减速机24;主控板26固定在U型支架21上且分别电连接第一蜗轮蜗杆减速机22、第一执行模块23、第二蜗轮蜗杆减速机24和第二执行模块25以供电和发送控制信号。如图3所示,主控板26通过一个L型板固定在U型支架21上。
需要补充说明的是,本发明涉及到两个部件的可拆卸式连接时,在没有特别说明的情况下,相连接的两个部件之间都设有平垫圈和/或弹性垫圈,通过内六角圆柱螺钉进行连接。
本实施例提供的激光扫描装置中,云台组件2中的U型支架21为拼接件,加工和实施的灵活性好,在装配时,注意在零件的接触处涂硅橡胶,起到密封作用。如图4所示,底座27为盒体结构,盒体内部设置电源,盒体侧面设有防水型开关和防水型连接器。底座27为固定装置,第一蜗轮蜗杆减速机22的本体固定在U型支架21上,而输出端固定在底座27上,因此可以实现底座27和U型支架21之间的相对运动,实现云台组件2的方位传动。
本发明的一种激光扫描装置,通过在云台组件2设置第一蜗轮蜗杆减速机22和第一执行模块23能够进行方位传动,通过设置第二蜗轮蜗杆减速机24和第二执行模块25能够进行俯仰传动,控制其作用点在地面和某平面上匀速运动,且其作用点为激光组阵列,可起到激光光束扫描的效果。
可选地,所述云台组件2还包括罩体28,罩体28上设有第一安装孔281,罩体28罩设在U型支架21上并与U型支架21的两个侧板213形成容置空间,俯仰臂242穿设罩体28上的第一安装孔281以连接激光扫描组件1。
如图4所示,罩体28与U型支架21相对应地,罩体28为开口向下的U型壳体,两侧边分别可拆卸式连接U型支架21的底板211的两侧,罩体28的两端内侧设有密封条,当罩体28罩设在U型支架21上时,罩体28的两端刚好抵接于U型支架21的两个侧板213的边缘,并通过密封条实现密封,对U型支架21上固定连接的第一蜗轮蜗杆减速机22、第一执行模块23、第二蜗轮蜗杆减速机24和第二执行模块25及其连接部件起到保护作用。
可选地,如图5和图6所示,激光扫描组件1包括激光器11和基座12,其中,基座12采用横截面为圆形或方形的结构件,多个激光器11在基座12上呈圆环形阵列或者矩形阵列分布,散热好,模块化易组装和拆卸。下面以圆环形阵列分布激光器11的情况,对激光扫描组件1进行详细说明。
如图7所示,激光扫描组件1包括激光器11和基座12,激光器11设有多个,基座12包括本体121,本体121的一端设有多个固定孔1211,多个固定孔1211间隔分布,每个固定孔1211内均设有一个激光器11。
激光扫描组件1的散热效率是其寿命的重要因素之一,因此,本发明采取如下措施来提高其散热效率:激光器11的外壳和基座12的本体121上固定孔1211之间采用h7/H7配合,表面粗糙度为Ra1.6μm,可提高其接触面积,降低热阻,迅速把热量传导到基座12上;基座12采用中空柱形设计,提高了散热面积,可通过内孔表面、柱表面、两端表面把热量辐射出去。补充地,本发明的激光扫描组件1还包括遮阳罩13,遮阳罩13可拆卸式连接于基座12的顶部与基座12不接触,遮阳罩13的四周边缘均具有大于基座12边缘的延展,增加遮阳罩13的覆盖面积,能够有效隔除大部分太阳光辐射。
如图7所示,基座12还包括第一压圈122和第二压圈123,第一压圈122上设有多个可视窗口1221,多个可视窗口1221与多个固定孔1211的位置一一对应设置,第一压圈122固定在本体121的一端并压紧固定激光器11,多个激光器11与多个可视窗口1221的位置一一对应;第二压圈123固定在本体121的另一端,并通过多个支柱124止抵于激光器11的末端。
如图7所示,可视窗口1221是通过在第一压圈122的开孔处粘接玻璃的方式实现的,具体可以采用硅橡胶粘接的方式。每个可视窗口1221的周向设有圆环形槽,圆环形槽内设置O型圈,在安装时,可视窗口1221与激光器11之间夹设O型圈,起到静密封作用。第一压圈122采用可拆卸式连接方式,通过螺钉连接于本体121上,起到对激光器11的固定和止位的作用。第二压圈123与本体121之间为可拆卸式连接,第二压圈123的内侧表面与本体121的端面之间设有支柱124,通过设置支柱124,可以在本体121内设置轴向长度可变的激光器11,实现第二压圈123的通用性安装。
为了增加支柱124与激光器11之间的抵接接触面,基座12还包括压板125,压板125设有多个,每个压板125压接在至少两个激光器11的末端并固定在本体上,支柱124的两端分别止抵于压板125和第二压圈123上。如图7所示,压板125的一个表面可以同时抵压至少两个激光器11,因此压板125的数量少于激光器11的数量,简化的安装过程。第二压圈123的内侧面设有密封圈,安装时密封圈能够夹设在第二压圈123和本体121之间,起到密封作用。再如图7,遮阳罩13与本体121之间设有支撑件131,支撑件131至少设置两个以提高遮阳罩13的连接稳定性,支撑件131可以隔离遮阳罩13和本体121,以隔离到达本体121的热量。遮阳罩13可拆卸式连接于本体121。激光扫描组件1中可拆式连接采用内六角圆柱头螺钉紧固连接,并设置平垫圈和弹性垫圈以密封和紧固。补充地,本体121的底部设有防水型连接器,用于电连接。
可选地,如图2所示,第一执行模块23包括第一电机233和第一编码器234,第一电机233的输出轴上设有第二同步带轮231,第二同步带轮231与第一电机233的输出轴之间平键连接,第一电机233的本体通过第一连接板235固定在U型支架21上;第一编码器234通过第一转接板固定连接于第一电机233的本体上,第一编码器234电连接于主控板26。
在一些实施例中,如图2和图4所示,第一编码器234首先通过第一转接板固定连接于第一电机233的本体上与之形成整体,然后整体通过第一连接板235固定在U型支架21上,第一连接板235为L型板,连接稳定性好,拆装方便。
可选地,结合图8,第二执行模块25包括第二连接板253、第二电机254、第二编码器255和转轴256,第二连接板253为L型板,第二连接板253的水平面固定连接于U型支架21的底板211,第二连接板253的竖直板上开设有第二安装孔2531和第三安装孔2532;
第二电机254的输出轴上设有第五同步带轮257,第五同步带轮257与第二电机254的输出轴之间平键连接,第二电机254的输出轴穿设在第二安装孔2531内且第二电机254固定连接于第二连接板253。
第二编码器255通过第二转接板固定连接于第二电机254的本体上,第二编码器255电连接于主控板26,以实现电控信号的传递。
转轴256,转轴256穿设在第三安装孔2532内并转动连接,转轴256与第二电机254的输出轴相互平行且位于第二连接板253的同一侧,转轴256上依次固定连接第六同步带轮258和第四同步带轮251,第三同步带259套装在第五同步带轮257和第六同步带轮258上以传动连接。
如图8所示,本发明实施例中的第二执行模块25为俯仰控制模块,具有二级传动,实现云台组件2对作用点的俯仰传动。第三安装孔2532内安装有轴承2561,转轴256穿设在轴承2561内实现转动连接,且轴承2561能够确保转轴256的水平位置。
可选地实施例中,第一电机233和第二电机254均为步进电机,采用16细分控制芯片。第一同步带轮221和第三同步带轮241的型号为S3M-48,第二同步带轮231、第四同步带轮251和第五同步带轮257的型号为S3M-15,第六同步带轮258的型号为S3M-60。当高度h=2m,速度v=1m/s,夹角θ=30°时,设置第五同步带轮257和第六同步带轮258之间的传动比为4,第四同步带轮251和第六同步带轮258之间的传动比为3.2,第二蜗轮蜗杆减速机24的传动比为20;第一同步带轮221和第二同步带轮231之间的传动比为3.2,第一蜗轮蜗杆减速机22的传动比为40,则可以实现方位二级传动(第一同步带232传动比和第一蜗轮蜗杆减速机22传动比)和俯仰三级传动(第三同步带252传动比、第二同步带252传动比和第二蜗轮蜗杆减速机24传动比),满足作用点匀速运动以实现激光扫描。
本发明还提供一种激光扫描方法,如图9所示,设激光扫描装置位于B点,C点为B点在地面或作用面的投射点,负载高度为h,激光扫描方法控制激光作用点的匀速运动,包括如下步骤:
S1,将激光扫描组件1连接于云台组件2,激光扫描组件1的高度即负载的高度为h,激光作用点运动t时间时间后到达A点,运动距离为L(t),则有:
L(t)=htan[θ(t)] (1)
式中,θ(t)为激光作用点的俯仰角,如图1,θ(t)为激光扫描组件1与激光作用点之间的连线AB和连线BC的夹角,是运动时间t的函数;
对式(1)求t的导数,则有:
激光作用点的运动速度v为:
则式(2)改写为:
对式(4)求以0~t为边界的定积分,则有:
根据泰勒级数,则有:
可知式(6)为时间t的函数,可再根据设定的速度v、负载高度h、方位传动的传动比和俯仰传动的传动比以及电机属性等因素,去控制第一执行模块23中的电机转动以及第二执行模块25中的电机转动。由式(6),可通过非线性控制电机的转动,得到激光作用点的匀速运动。
S2,第一执行模块23和第一蜗轮蜗杆减速机22进行方位传动,激光作用点的方位转速ω为:
式中,i
S3,第二执行模块25和第二蜗轮蜗杆减速机24进行俯仰传动,得到激光作用点的俯仰角θ(t),为:
式中,n
下面通过一个具体的实施例来说明本发明的扫描方法的应用:
设激光作用点的速度v=1m/s,h=2m,t时件后θ(t)=30°时,ω=θ′=0.375rad/s;θ(t)=80°时,ω=θ′≈0.015rad/s。由此可知,为了满足激光作用点的匀速运动,第二执行模块25中电机的速度变化非常大。
本发明中,俯仰采用三级传动,其传动比为256;步进电机步距角1.8°,采用16细分驱动芯片;综合传动比和16细分,相当于每个脉冲步进电机输出1.8°÷(256×16)=0.000439453125°,可见,本发明的激光扫描装置可以控制激光作用点的匀速运动。
本发明的一种激光扫描方法,应用本发明提供的激光扫描装置,采用二级方位传动和三级俯仰传动,可以控制激光作用点在地面和某平面上匀速运动,且激光作用点为激光组阵列,可起到激光光束扫描的效果,本发明尤其适用于负载高度较低的情况,如上述实施例中h=2m时可以实现很好的激光作用点的控制。
显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 激光扫描系统、激光扫描方法、移动激光扫描系统及程序
- 一种激光扫描装置和激光扫描方法