一种自适应悬置果柄长势的颚式末端采摘装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及一种采摘装置,尤其是一种自适应悬置果柄长势的颚式末端采摘装置。
背景技术
果树业是农业的重要组成部分,在我国农业中仅次于粮、菜位居第三位。随着国内农业劳动力的大幅度减少,当前“以人工为主”采摘模式的困境日益凸现。如何对高空果实实施高效无损采摘,已成为我国果树业未来提质增效的一个重要课题。
为了解决上述问题,国内学者针对不同高空果实的采摘提出了多种可行的类采摘机器人方案。作为采摘高空果实的重要部件,末端采摘装置的合理设计显得尤为重要。目前用于高空果实的末端采摘装置主要有两种:第一种是以夹持果实,通过拉、扭、折断果梗方式采摘;第二种是以切割果梗、跌落式采摘。前者在夹持过程中需要对悬置果实进行精准夹持,而且夹持、拉、扭、折断等动作极易带来果实破损,因而后者更受世人的青睐。然而,由于高空果实的个体差异性、姿态差异性,现有采摘的平剪操作极易与侧旁果枝发生干涉。因此,基于剪切原理,有必要开发出一种自适应悬置果柄长势的颚式末端采摘装置。
发明内容
发明目的:提供一种自适应悬置果柄长势的颚式末端采摘装置,能够自适应剪切差异性悬置果柄,实现悬置果实的无损伤采摘。
技术方案:本发明所述的自适应悬置果柄长势的颚式末端采摘装置,包括姿态调节机构以及原地剪切机构;原地剪切机构包括颚式剪切机构以及差动进给机构;
颚式剪切机构安装在差动进给机构上,由差动进给机构驱动颚式剪切机构对果柄进行咬合式剪切;差动进给机构安装在姿态调节机构上,由姿态调节机构对差动进给机构的朝向角度进行调节。
进一步的,姿态调节机构包括安装圆环、动圆台、三根电动伸缩杆以及外层圆管;三根电动伸缩杆的上端均铰接在安装圆环的下侧面上,下端均铰接在动圆台上;外层圆管通过球形关节安装在安装圆环的圆孔上,且外层圆管的下端固定在动圆台上。
进一步的,在安装圆环上安装有用于观察果实位置的微型相机。
进一步的,球形关节包括关节球以及环形座;在关节球上竖向设置有贯穿中心的关节孔;外层圆管插装在关节孔上;环形座同轴安装在安装圆环的内圈上,且环形座与关节球的球面相配合。
进一步的,差动进给机构包括输果管、剪切驱动管、剪切驱动电机以及剪切驱动丝杆;在位于安装圆环下侧的外层圆管圆周侧面上竖向设置有一个驱动窗口;在剪切驱动管上设置有一个驱动侧耳;剪切驱动管的下端插装在外层圆管上,且驱动侧耳通过驱动窗口伸出;输果管插装在剪切驱动管上,输果管的上端伸出剪切驱动管外,下端贯穿动圆台;在输果管上设置有一个固定侧耳,固定侧耳通过驱动窗口伸出,且固定侧耳位于驱动侧耳的下方;
剪切驱动电机安装在驱动侧耳上;剪切驱动丝杆的上端对接在剪切驱动电机的输出轴上,下端螺纹旋合在动圆台上,且剪切驱动丝杆螺纹旋合在固定侧耳上;在输果管的上端上设置有一个拢果球头,在拢果球头上设置有一个与输果管连通的果实孔;在剪切驱动管的上边缘上对称安装有两个T形连接板;颚式剪切结构安装在拢果球头上,由两个T形连接板驱动进行剪切。
进一步的,在动圆台的上侧面上竖向固定有一根下侧导向杆;下侧导向杆的上端贯穿驱动侧耳。
进一步的,在拢果球头上竖向设置有一个导向孔;在剪切驱动管的上边缘上固定有一根插装在导向孔上的上侧导向杆。
进一步的,颚式剪切结构包括外剪体、内剪体以及四个铰接板;在定位球头的外圆周面上同轴设置有两根铰接轴,且两根铰接轴的轴线与果实孔的中心线垂直相交;内剪体的下侧面贴合定位球头的外圆周面;外剪体的下侧面用于贴合内剪体的上侧面;内剪体与外剪体的两端分别向下翻折形成内翻折边以及外翻折边;同一侧的内翻折边与外翻折边中部交叠后铰接在对应侧的铰接轴上;四个铰接板的上端分别铰接在四个翻折边的端部上,同一侧的两个铰接板的下端分别铰接在对应侧T形连接板的两个水平端部上。
进一步的,在内剪体和外剪体的相对边缘上均设置有V形剪切口。
进一步的,在安装圆环的下侧面上固定有一个保护套筒;姿态调节机构位于保护套筒内。
本发明与现有技术相比,其有益效果是:利用颚式剪切机构对悬置果实的果柄进行原地仿生咬合式剪切,可确保果实的无损伤采摘;利用姿态调节机构剪切前将原地剪切机构调至恰当位姿,灵活避让交错生长的果枝,方便对单个果实或拥簇果实进行精准采摘。
附图说明
图1为本发明的内部结构示意图;
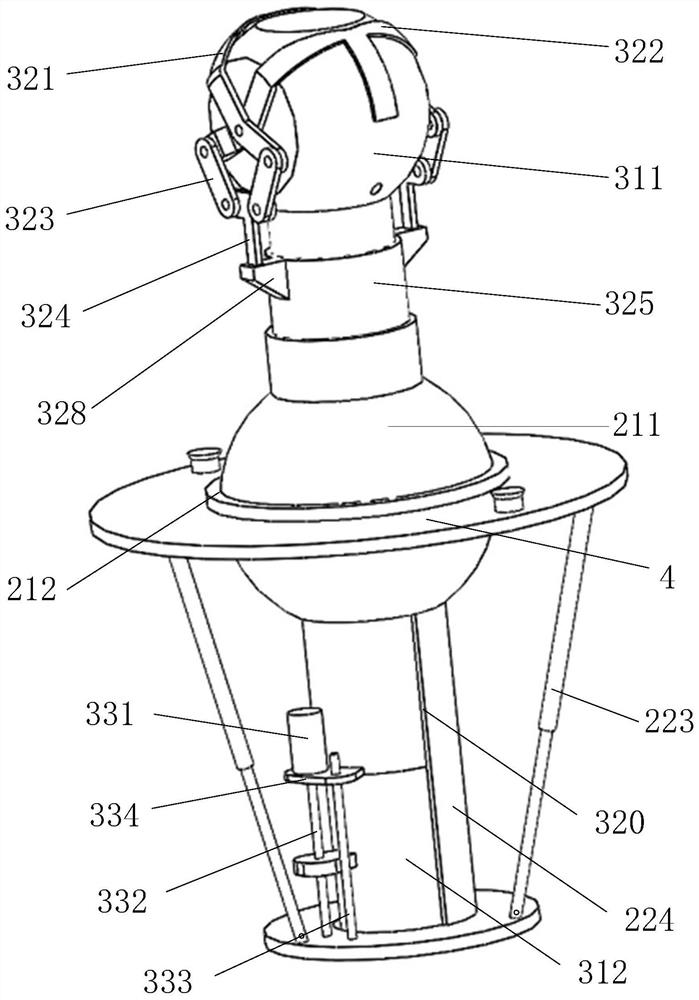
图2为本发明的结构示意图;
图3为本发明采摘果实的示意图;
图4为本发明输果管的零件图;
图5为本发明颚式剪切结构的示意图。
具体实施方式
下面结合附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
实施例1:
如图1-5所示,本发明公开的自适应悬置果柄长势的颚式末端采摘装置包括:姿态调节机构2以及原地剪切机构3;原地剪切机构3包括颚式剪切机构以及差动进给机构;
颚式剪切机构安装在差动进给机构上,由差动进给机构驱动颚式剪切机构对果柄进行咬合式剪切;差动进给机构安装在姿态调节机构2上,由姿态调节机构2对差动进给机构的朝向角度进行调节。
利用颚式剪切机构对悬置果实的果柄进行原地仿生咬合式剪切,可确保果实的无损伤采摘;利用姿态调节机构2剪切前将原地剪切机构3调至恰当位姿,灵活避让交错生长的果枝,方便对单个果实或拥簇果实进行精准采摘。
进一步的,姿态调节机构2包括安装圆环4、动圆台222、三根电动伸缩杆223以及外层圆管224;三根电动伸缩杆223的上端均铰接在安装圆环4的下侧面上,下端均铰接在动圆台222的上侧面上;外层圆管224通过球形关节安装在安装圆环4的圆孔上,且外层圆管224的下端固定在动圆台222的上侧面上。
利用三根电动伸缩杆223驱动动圆台222摆动,动圆台222带动外层圆管224摆动,从而实现对原地剪切机构3朝向以及角度的调整。
进一步的,在安装圆环4上对称安装有两个微型相机211,用于观察果实位置,且两个微型相机211位于安装圆环4的同一条直径上。利用两个微型相机211观察果实位置,从而确定差异性悬置果实被剪切的恰当位置。
利用三根电动伸缩杆223驱动动圆台222摆动,动圆台222带动外层圆管224摆动,从而实现对原地剪切机构3朝向以及角度的调整。
进一步的,球形关节包括关节球211以及环形座212;在关节球211上竖向设置有贯穿中心的关节孔;外层圆管224插装在关节孔上;环形座212同轴安装在安装圆环4的内圈上,且环形座212与关节球211的球面相配合。
利用关节球211与环形座212之间的配合,确保外层圆管224朝向任意方向时关节球211均按压在环形座212上,为外层圆管224提供稳定的支撑力。
进一步的,差动进给机构包括输果管312、剪切驱动管325、剪切驱动电机331以及剪切驱动丝杆332;在位于安装圆环4下侧的外层圆管224圆周侧面上竖向设置有一个驱动窗口320;在剪切驱动管325圆周侧面的下边缘上设置有一个驱动侧耳334;剪切驱动管325的下端插装在外层圆管224上,且驱动侧耳334通过驱动窗口320伸出;输果管312插装在剪切驱动管325上,输果管312的上端伸出剪切驱动管325外,下端贯穿动圆台222;在输果管312的下侧圆周面上设置有一个固定侧耳335,固定侧耳335通过驱动窗口320伸出,且固定侧耳335位于驱动侧耳334的下方;
剪切驱动电机331安装在驱动侧耳334上;剪切驱动丝杆332的上端对接在剪切驱动电机331的输出轴上,下端螺纹旋合在动圆台222上,且剪切驱动丝杆332螺纹旋合在固定侧耳335上;在输果管312的上端上设置有一个拢果球头311,在拢果球头311上设置有一个与输果管312同轴连通的果实孔315;在剪切驱动管325的上边缘上对称设置有两个耳座328;在两个耳座328上均固定有一个T形连接板324;颚式剪切结构安装在拢果球头311上,由两个T形连接板324驱动进行剪切。
利用剪切驱动电机331驱动剪切驱动丝杆332旋转,从而通过驱动侧耳334带动剪切驱动管325相对于外层圆管224上下移动,从而实现对颚式剪切结构的驱动;利用拢果球头311将果实定位在果实孔315内,确保剪切果柄时不会误伤果实或果树枝;利用输果管312便于传输剪切下来的果实。
进一步的,在动圆台222的上侧面上竖向固定有一根下侧导向杆333;下侧导向杆333的上端贯穿驱动侧耳334。
利用下侧导向杆333与驱动侧耳334之间的配合确保剪切驱动管325不会相对外层圆管224产生旋转导致颚式剪切结构剪切时移位。
进一步的,在拢果球头311上竖向设置有一个导向孔316;在剪切驱动管325的上边缘上竖向固定有一根插装在导向孔316上的上侧导向杆326。
利用导向孔316与上侧导向杆326之间的配合,进一步确保剪切驱动管325不会相对输果管312产生旋转,增强颚式剪切结构的运动稳定性。
进一步的,颚式剪切结构包括外剪体321、内剪体322以及四个铰接板323;在定位球头311的外圆周面上同轴设置有两根铰接轴313,且两根铰接轴313的轴线与果实孔315的中心线垂直相交;内剪体322的下侧面贴合定位球头311的外圆周面;外剪体321的下侧面用于贴合内剪体322的上侧面;内剪体322与外剪体321的两端分别向下翻折形成内翻折边以及外翻折边;同一侧的内翻折边与外翻折边中部交叠后铰接在对应侧的铰接轴313上;四个铰接板323的上端分别铰接在四个翻折边327的端部上,同一侧的两个铰接板323的下端分别铰接在对应侧T形连接板324的两个水平端部上。
利用外剪体321、内剪体322、四个铰接板323以及T形连接板324之间的配合,T形连接板324跟随剪切驱动管325同步上下运动,通过四个铰接板323带动外剪体321与内剪体322合拢,从而实现了对露出果实孔315外的果柄进行准确剪切。
进一步的,在内剪体322和外剪体321的相对边缘上均设置有V形剪切口329。利用V形剪切口329对果柄进行定位,保证精准稳定的剪切果柄。
进一步的,在安装圆环4的下侧面上固定有一个保护套筒1;姿态调节机构2位于保护套筒1内。利用保护套筒1对姿态调节机构2进行保护。
本发明提供的自适应悬置果柄长势的颚式末端采摘装置中,剪切驱动电机331采用现有的步进电机;电动伸缩杆223采用现有的电动伸缩推杆,用于驱动动圆台222摆动;微型相机211采用现有的微型相机,用于观察果实位置。
本发明提供的自适应悬置果柄长势的颚式末端采摘装置在安装使用时,通过微型相机211观察悬置果实相对于该采摘装置的位置,确定果实的被剪切的恰当位置,之后三根电动伸缩杆223进行伸缩,使原地剪切机构3摆动至恰当位置,并将果实收拢在拢果球头311上的果实孔315内,之后切驱动电机331驱动剪切驱动丝杆332旋转,通过驱动侧耳334带动剪切驱动管325沿外层圆管224向下移动,T形连接板324向下拉扯四个铰接板323,使外剪体321与内剪体322合拢剪切果柄;剪切完成后,果实沿输果管312输送至储存处储存。
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。