基于方位信息多被动探测平台水下航行器数据的融合方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及一种水声信号融合技术,具体涉及一种基于方位信息多被动探测平台水下航行器数据的融合方法。
背景技术
二十一世纪是海洋世纪,当前一股空前的“海洋热”席卷全球,我国拥有 1.8万多公里的海岸线,1.4万公里的岛岸线,以及广阔的海洋活动空间和丰富的海洋资源。为保障我国的海洋合法权益,大力发展海洋事业、建设海洋强国势在必行。然而,由于海洋环境的复杂性以及人类在水下活动的日益活跃,这令探测原本隐蔽性就在不断提高的水下目标变得更加困难。幸运的是,20世纪70年代美国海军偶然发现通过融合多个声纳数据可以提高对目标的探测能力。至此,数据融合技术逐渐出现在人们的视野之中,并广泛地应用在雷达、声纳、自动化等领域。
期刊(方君,戴邵武,聂子健.主动声纳浮标基于CKF的潜艇目标跟踪算法. 仪表技术,2018(03):19-35.)、专利(李峥,黄海宁,李宇.一种水声多目标自主检测与方位跟踪方法.申请号:CN201310703672)和专利(梁洪涛,康凤举,张建春, 汪小东.一种多层次信息融合的纯方位水下目标跟踪算法.申请号: CN201710365957)等利用目标的位置信息,通过时间序列数据的融合方法实现对水下目标的探测。但是,这些方法都是基于单声纳平台的探测数据融合方法,不仅时/空间的探测覆盖范围有限,其系统的可靠性、融合算法的估计精度等都相对不高。为此,基于多声纳平台的探测数据融合方法得到了大力发展。文献(X.Sheng,Y.Chen,L.Guo,J.Yin,and X.Han,"Multitarget tracking algorithm usingmultiple GMPHD filter data fusion for sonar networks,"Sensors (Switzerland),vol.18,no.10,2018.)利用空间分布不同的多声纳组网进行探测,探测性能和传统单声纳探测相比有了提升。但是,这些方法均依赖于主动声纳探测的目标位置信息,不仅容易暴露声源声纳的位置,其探测距离也会大幅受限。
被动声纳不发射探测信号,仅通过接收的目标辐射噪声来获取目标的特征参数,具有很好的隐蔽性,除此之外,由于仅需要考虑单程的传播损失,因此被动式探测声纳的探测距离相对较远,因此在大范围水下目标探测和跟踪场景中,被动式探测声纳得到了更加广泛的应用。但是被动式探测声纳无法像主动式声纳那样可以获取较多可靠的非合作目标特征,因此很多传统上的主动式声纳数据跟踪融合方法都很难使用。在被动探测系统中,依靠多元阵或矢量声纳探测可以得到目标的方位角信息,方位角信息作为被动探测获得的有效信息之一,近年来也一直被作为研究的重点和热点。因此,本发明提出了一种基于方位信息的多被动探测平台水下航行器数据融合方法。
发明内容
有鉴于此,本发明提供了一种基于方位信息的多被动探测平台水下航行器数据融合方法,能够实现大范围的目标运动态势较为准确的估计。该方法包括如下步骤:
步骤1,至少两个不同位置的探测平台分别测量水下航行器的方位角信息,根据所述方位角信息计算所述水下航行器的定位信息;
步骤2,构建多传感器多水下航行器跟踪场景,将多个所述水下航行器的定位信息发送到融合中心进行数据融合处理得到定位结果;
步骤3,对所述定位结果进行跟踪,根据GM-PHD滤波器分别计算其在k-1 时刻的后验强度,和k时刻的预测强度。
特别地,所述步骤1中根据所述方位角信息计算所述水下航行器的定位信息,具体包括:对于第一探测平台T和第二探测平台R,定位方程如下所示
其中,θ
特别地,步骤2具体包括:若第一传感器i和第二传感器j对同一目标的局部估计和误差协方差矩阵分别为
其中,
P
特别地,步骤2中,构建多传感器多水下航行器跟踪场景,包括如下条件:每个传感器的量测过程是相互独立的,且每个传感器产生的估计误差协方差之间是相互独立不相干的或两个传感器的互协方差可以忽略;两个传感器的量测与送到融合中心的时间是同时同步。
特别地,步骤2具体包括:当传感器数量N>2时,且所有的估计误差
特别地,步骤3具体包括:若k-1时刻的后验强度表示为
更新的目标个数的期望可以表示为:
上式中,P
N(·;m,P)表示一个均值为m,协方差为P高斯密度;H
其中,设置
提取出所有
有益效果:
1、本发明能够实现大范围的目标运动态势较为准确的估计;
2、本发明应用多传感器多目标跟踪场景,将多个所述水下航行器的定位信息发送到融合中心进行数据融合处理得到定位结果,结构简单易于工程实现、计算量小;
3、本发明充分利用被动探测平台的特点,不会暴露声源声纳的位置,其探测距离较主动探测平台大很多;
4、本发明充分利用方位角信息和多声纳平台的探测技术实现水下航行器数据融合,实现了大范围水下目标探测和跟踪。
附图说明
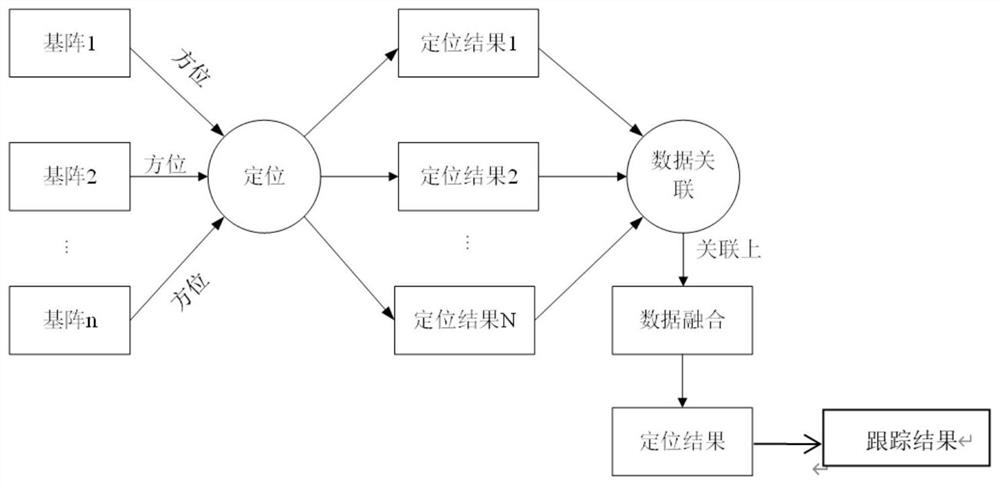
图1为本发明中多被动探测平台水下航行器数据融合方法的流程示意图;
图2为本发明中水下航行器和探测平台之间构成示意图;
图3为本发明中目标的运动态势及被动探测阵的位置的示意图;
图4a为本发明中多被动探测平台第45帧的定位结果和融合定位结果示意图;
图4b为本发明中多被动探测平台第100帧的定位结果和融合定位结果示意图;
图4c为本发明中多被动探测平台第150帧的定位结果和融合定位结果示意图;
图4d为本发明中多被动探测平台第200帧的定位结果和融合定位结果示意图。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明提供了一种基于方位信息的多被动探测平台水下航行器数据融合方法,如图1所示,本发明方法主要包含以下三个步骤:多被动探测平台定位、多基地目标融合定位、定位结果跟踪,具体如下:
步骤1,多被动探测平台定位,即至少两个不同位置的探测平台分别测量水下航行器的方位角信息,根据所述方位角信息计算所述水下航行器的定位信息
本方法中使用的定位方法为交叉定位算法,测向交叉定位方法的实质是利用各个声纳基阵测得的目标方位角,利用定向线或定向面交汇出目标的位置。双基阵声纳是多基阵声纳系统的基本配置,假设水下航行器和探测平台之间构成如图2所示的一个三角关系。
图中,T和R为两个不同位置的探测平台,一般两者的距离较大。若只能从探测平台获得方位角信息,那么可以只利用两个探测平台所测得的方位信息对目标定位。利用两个探测平台对目标方向角的测量,就可以得到目标在当前时刻的位置,此时,对以声波到达方向为基础的双探测平台定位算法加以运用,就可以来定位具体目标,其具体定位方程如下所示
其中,θ
从上式中可以看出,结合两个探测平台阵的方位信息,就可以得到目标的位置坐标(x,y),即,实现对目标的定位。
步骤2,多基地目标融合定位,即构建多传感器多目标跟踪场景,将多个所述水下航行器的定位信息发送到融合中心进行数据融合处理得到定位结果;
假设共有N组定位结果,那么,将这N组定位结果进行数据融合,本专利所涉及的数据融合算法主要考虑以下两个假设:
(1)每个传感器的量测过程是相互独立的,且每个传感器产生的估计误差协方差之间是相互独立不相干的或两个传感器的互协方差可以忽略的;
(2)两个传感器的量测与送到融合中心的时间是同时同步的。
通过上述两种假设,本文主要考虑了“简单的凸组合”方法。
假设传感器i和传感器j对同一目标的局部估计和误差协方差矩阵分别为
其中,
P
当传感器数量N>2时,且所有的估计误差
当利用多个传感器信息进行融合时,给各个传感器一个权重值,利用该权重值的大小来决定该传感器在融合算法中的影响程度。在本发明中,借鉴了加权融合的方法,假设各个传感器的权重相同,并且允许传感器存在一定的虚警,以此来保证系统的最大检测能力,进行加权融合的方法主要如下:
(1)若多个传感器的局部估计结果可以相互关联,则进行简单凸组合融合方法进行数据融合;
(2)若某一传感器的局部估计结果与其他至少一个传感器不关联,那么该传感器的局部估计结果可能为虚警,也可能为真实目标,如果该传感器的估计结果和其他传感器估计结果能够相关联,那么,就将这部分的传感器结果用简单凸组合的方法进行融合,并将融合结果作为最终估计结果。否则,就将这部分结果视为杂波。
通过上述内容,我们就可以将关联算法及融合算法应用在多传感器融合系统中,将多传感器获得的同步数据进行数据融合,这样就能以最大的检测能力及范围上,对监视区域内的多目标进行观测,并且得到较为可靠的观测结果。
步骤3,定位结果跟踪,即对所述定位结果进行跟踪,根据GM-PHD滤波器分别计算其在k-1时刻的后验强度,和k时刻的预测强度;
对于上述定位结果,若k-1时刻的后验强度即表示为
那么,k时刻的预测强度为v
这里,
N(·;m,P)表示一个均值为m,协方差为P高斯密度。m
更新的目标个数的期望可以表示为:
这里,
上式中,P
N(·;m,P)表示一个均值为m,协方差为P高斯密度;H
式中,
其中,
提取出所有
在监视区域[-5000,5000]×[-5000,5000](米)范围内,声纳的探测周期为4秒,共模拟产生了200帧数据信息,其中目标的状态信息为被动探测所得到的方位信息。用k表示时间间隔,单位为帧,即1帧数据间隔4秒。在仿真过程中假设不同被动探测平台间的观测过程是相互独立的,并对监视区域内的目标位置状态、数量、起止时间等信息均未知,即不需要知道先验信息,在每次观测中,假设被动声纳会受到0-10个随机不等的干扰目标,目标角度量测误差分布服从均匀分布。
目标的运动态势及被动探测阵的位置如图3所示,图中两条直线分别代表目标1和目标2,五角星位置即为被动探测阵的位置。位置坐标均以(x,y)表示, 速度坐标表示为(v
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
对于本领域技术人员而言,显然本发明实施例不限于上述示范性实施例的细节,而且在不背离本发明实施例的精神或基本特征的情况下,能够以其他的具体形式实现本发明实施例。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明实施例的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本发明实施例内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。系统、装置或终端权利要求中陈述的多个单元、模块或装置也可以由同一个单元、模块或装置通过软件或者硬件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
最后应说明的是,以上实施方式仅用以说明本发明实施例的技术方案而非限制,尽管参照以上较佳实施方式对本发明实施例进行了详细说明,本领域的普通技术人员应当理解,可以对本发明实施例的技术方案进行修改或等同替换都不应脱离本发明实施例的技术方案的精神和范围。
- 基于水下航行器方位信息压缩的多平台被动数据融合方法
- 一种基于目标方位与线谱的小平台水声被动探测信息融合方法