一种适用于山地丘陵的无人车及姿态调整方法
文献发布时间:2023-06-19 18:53:06
技术领域
本发明涉及山地丘陵地区智能农业装备技术领域,特别是涉及一种适用于山地丘陵的无人车及姿态调整方法。
背景技术
实现智慧茶园的构建以及茶树生长环境调控和高效生产,信息获取是最关键的环节之一。面对山地丘陵地带茶园的非结构环境,构建稳定性能优良且地形自适应能力强的茶树信息采集装备,改变“设备上山难”、“上山难应用”的现状成为构建智慧茶园的亟待解决的问题。搭建稳定性能高、非结构地形自适应能力强的车载式茶树信息智能感知平台,实现快速、多维、多尺度的植物生长信息实时监测,为实现茶树的生长信息检测、水肥智能管理调控提供精准信息支持,有助于突破传统茶树信息获取困难与茶园智能化管理程度低等技术发展瓶颈。
目前田间信息监测平台应用场景大多以的大田为主,环境结构单一、地势平坦,对车载式信息监测平台地形适应性要求较低。而茶树主要种植在山地丘陵地带,目前适用于山地丘陵地区的茶园自走式智能检测装备缺乏,现有的技术资料中,车载式平台在非结构环境下地形自适应能力较差;例如,专利(CN 113419553 A)公开了一种高地隙植保机重心调整系统及其调整方法,利用植保机两侧可调式药箱架对植保机重心进行调整,但是其可以调整的角度有限,不适用于坡度较大的山地丘陵地带,并且无法保证机器上方底盘保持水平状态,因此当地形坡度较大时,容易发生侧滑。除此之外,专利(CN 111503459 B)公开了一种用于田间作物光谱信息获取的装置,该装置能够通过电机驱动丝杠旋转,实现采集平台的自由升降,但是在具有坡度的地形进行作业时,车体将会发生倾斜,平台主体无法保持水平,车体重心将偏离车体中心位置,当坡度较大时,还存在侧滑甚至损坏车体的风险,极大的影响信息采集的连续性以及作业效率。
发明内容
本发明的目的是提供一种适用于山地丘陵的无人车及姿态调整方法,以解决上述现有技术存在的问题,进行结构创新与姿态调整控制策略研究,实现山地丘陵地带的坡度自适应,能够为山地丘陵地区茶树信息的采集提供稳定平台,保证茶树信息的连续稳定采集,有助于提高信息获取的有效性与精准度,对于智慧茶园的构建、茶叶生长品质的精准调控具有现实指导意义。
为实现上述目的,本发明提供了如下方案:
本发明提供了一种适用于山地丘陵的无人车,包括车架和设置在所述车架两侧的侧臂,所述侧臂的下端设置有行走装置,各所述侧臂设置有姿态调整装置,所述车架的两侧分别与各所述姿态调整装置连接,所述姿态调整装置用于调整所述车架的姿态,所述车架上设置有控制结构和三轴角度传感器,所述三轴角度传感器和所述姿态调整装置均与所述控制结构电连接,所述三轴角度传感器用于检测所述车架的倾斜角度。
优选地,所述姿态调整装置包括主滑动结构、辅助滑动结构、防侧翻悬架和液压拉杆,所述液压拉杆与所述控制结构电连接,所述主滑动结构和所述辅助滑动结构均设置在所述侧臂上,所述防侧翻悬架的一端与所述车架铰接,所述防侧翻悬架的另一端与所述辅助滑动结构铰接,所述液压拉杆的一端与所述车架铰接,所述液压拉杆的另一端与所述主滑动结构铰接,所述车架分别通过连接结构与所述主滑动结构和所述辅助滑动结构铰接。
优选地,各所述姿态调整装置中的所述辅助滑动结构为两个,两个所述辅助滑动结构分别位于所述主滑动结构的两侧。
优选地,各所述连接结构包括第一铰接连接板和第二铰接连接板,所述第一铰接连接板和所述第二铰接连接板铰接,所述第一铰接连接板设置在所述主滑动结构或所述辅助滑动结构上,所述第二铰接连接板设置在所述车架的侧面。
优选地,所述主滑动结构包括步进电机、主导轨滑块、丝杠和主导轨固定板,所述步进电机与所述控制结构电连接,所述步进电机设置在所述侧臂上,所述步进电机的动力输出端与所述丝杠的一端连接,所述主导轨滑块与所述丝杠螺纹连接,所述主导轨固定板设置在所述主导轨滑块上,所述液压拉杆的另一端与所述主导轨固定板上的拉杆铰接板铰接。
优选地,所述辅助滑动结构包括辅助导轨滑轨、辅助导轨滑块和定位滑杆,所述辅助导轨滑轨设置在所述侧臂上,所述定位滑杆设置在所述辅助导轨滑轨中,所述辅助导轨滑块套设在所述定位滑杆的外侧,所述辅助导轨滑块能够沿所述辅助导轨滑轨滑动,所述防侧翻悬架的另一端与所述辅助导轨滑块上的悬架铰接板铰接。
优选地,所述车架呈梯形,所述车架采用龙门架结构。
本发明还公开了一种采用所述适用于山地丘陵的无人车的姿态调整方法,包括以下步骤:
适用于山地丘陵的无人车启动之后,通过控制结构的人机交互界面设定阈值角度α;
在车架的坡度自适应姿态调整过程中,适用于山地丘陵的无人车开始运行后,三轴角度传感器开始获取车架的倾斜角度,如果倾斜角度>阈值角度α,液压拉杆电磁阀通电,此时液压拉杆处于活动状态,上位机将实际倾斜角度与阈值角度α之间的差值被计算成步进电机的转动圈数,下位机单片机系统根据计算结果转化成相应脉冲,通过电机驱动器对步进电机进行控制,对车架进行水平调整,直到车架实际倾斜角度≤α,步进电机停止转动,液压拉杆电磁阀断电复位,液压拉杆锁定车架,适用于山地丘陵的无人车坡度自适应姿态调整阶段完成,此控制过程循环进行实现实时动态调整。
本发明相对于现有技术取得了以下技术效果:
本发明的适用于山地丘陵的无人车能够横跨单条茶垄进行作业,能够对地形坡度进行自适应,通过实时的姿态调整,使车体重心始终处于车体中心位置,保证车体不发生倾斜和侧滑,车架始终保持水平状态,能够为山地丘陵地区茶树信息的采集提供稳定平台。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
附图说明:
图1为本发明的适用于山地丘陵的无人车外观图;
图2为本发明的适用于山地丘陵的无人车内部结构图;
图3为本发明的车架结构图;
图4为本发明的主滑动结构、辅助滑动结构示意图;
图5为本发明的辅助滑动结构示意图;
图6为本发明的液压拉杆连接方式示意图;
图7为本发明的液压拉杆控制流程图;
图8为本发明的车架静力学仿真分析图;
图9为本发明的姿态调整方法流程图;
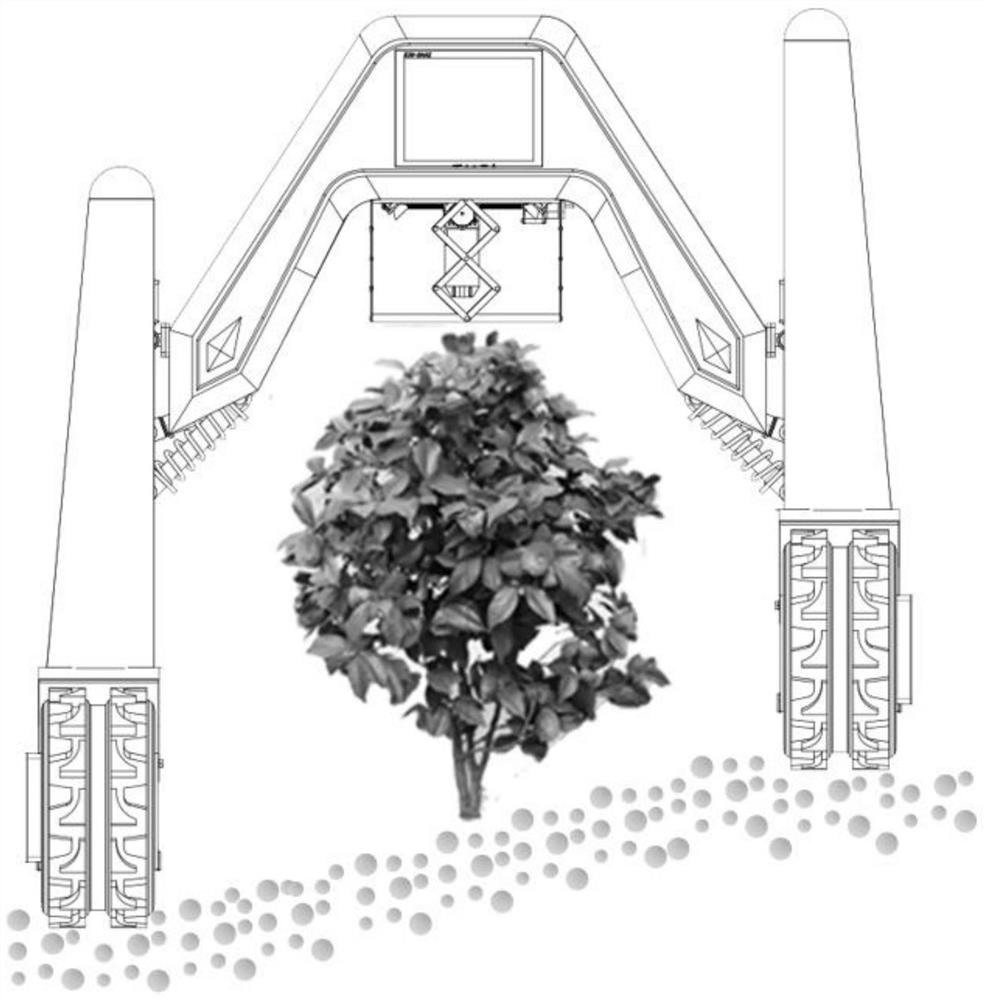
图10为本发明的适用于山地丘陵的无人车处于工作状态的示意图;
其中:1-外壳,2-工控机,3-侧臂外壳,4-行走装置,5-侧臂支撑板,6-辅助导轨固定板,7-悬架铰接板,8-防侧翻悬架,9-辅助导轨滑块,10-第一铰接连接板,11-液压拉杆,12-步进电机,13-车架,14-信息采集模块,15-销轴,16-第二铰接连接板,17-拉杆铰接板,18-定位滑杆,19-主导轨滑块,20-联轴器,21-主导轨固定板,22-丝杠,23-辅助导轨滑轨。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种适用于山地丘陵的无人车及姿态调整方法,以解决上述现有技术存在的问题,进行结构创新与姿态调整控制策略研究,实现山地丘陵地带的坡度自适应,能够为山地丘陵地区茶树信息的采集提供稳定平台,保证茶树信息的连续稳定采集,有助于提高信息获取的有效性与精准度,对于智慧茶园的构建、茶叶生长品质的精准调控具有现实指导意义。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例一
如图1-图8所示:本实施例提供了一种适用于山地丘陵的无人车,包括车架13和设置在车架13两侧的侧臂,侧臂的外侧设置有侧臂外壳3,侧臂的一侧设置有侧臂支撑板5,侧臂的下端设置有行走装置4,各侧臂设置有姿态调整装置,车架13的两侧分别与各姿态调整装置连接,两个姿态调整装置对称设置在车架13的两侧,姿态调整装置用于调整车架13的姿态,车架13上设置有控制结构和三轴角度传感器,控制结构包括工控机2和单片机,工控机2和单片机电连接,工控机2作为上位机获取、处理数据,单片机控制执行机构动作,即三轴角度传感器与工控机2电连接,姿态调整装置与单片机电连接,三轴角度传感器用于检测车架13的倾斜角度。
具体地,本实施例中,车架13呈梯形,车架13采用龙门架结构,可以横跨单条茶垄进行信息采集,车架13的外侧设置有外壳1。车架13可作为传感器模块的搭载平台,同时也作为支架对整车起到支撑作用。车架13通过多层龙门架的结构设计,能够对车体起到很好的支撑作用。当车体处于倾斜状态时,车架13可以承受来自于侧臂的挤压力,在适用于山地丘陵的无人车转弯时,可承受扭矩并进行力的传递。车架13的静力学分析结果如图8所示,车架13的材料选择合金钢,两侧共施加300kgf,结果显示最大应力远小于屈服应力,结构设计满足实际需求。
本实施例中,车架13上可以设置现有的信息采集模块14,信息采集模块14用于采集茶树冠层信息,信息采集模块14可以搭载主动光源、多光谱相机、RGB相机、深度相机等多种传感器和设备。
本实施例中,各姿态调整装置包括一个主滑动结构、两个辅助滑动结构、两个防侧翻悬架8和一个液压拉杆11,两个辅助滑动结构分别位于主滑动结构的两侧;液压拉杆11与单片机电连接,主滑动结构和辅助滑动结构均设置在侧臂上。
本实施例中,位于车架13两侧的两个液压拉杆11的油路连接方式如图6所示。液压拉杆11电磁阀选用两位两通电磁阀。液压拉杆11可以在车体姿态调整过程中保持活动状态,在车体姿态调整完毕后保持锁定状态,使适用于山地丘陵的无人车在行进过程中避免车架13产生抖动,使信息采集模块14能够更稳定的采集茶树冠层信息,其控制流程图如图7所示。
本实施例中,各姿态调整装置的两个防侧翻悬架8分别液压拉杆11的前侧和后侧,当车体发生倾斜时,防侧翻悬架8的弹簧受到压缩,车架13在防侧翻悬架8反作用力下限定倾斜角度,避免角度过大车体重心失衡,车体倾翻。同时在姿态调整装置的共同作用下,使车体重心回到中心位置,车体上方的车架13恢复水平状态,完成姿态调节。
本实施例中,主滑动结构包括步进电机12、主导轨滑块19、丝杠22和主导轨固定板21,步进电机12与单片机电连接,步进电机12设置在侧臂上,步进电机12的动力输出端与丝杠22的一端通过联轴器20连接,主导轨滑块19与丝杠22螺纹连接,主导轨固定板21设置在主导轨滑块19上,液压拉杆11的一端与车架13的底部铰接,液压拉杆11的另一端与主导轨固定板21下部的拉杆铰接板17铰接。
本实施例中,各辅助滑动结构包括两个辅助导轨滑轨23、两组辅助导轨滑块9和定位滑杆18,辅助导轨滑轨23设置在侧臂的辅助导轨固定板6上,各组辅助导轨滑块9包括八个辅助导轨滑块9,每组的两个辅助导轨滑块9中间有两个定位滑杆18穿过,定位滑杆18设置在辅助导轨滑轨23中,辅助导轨滑块9能够沿定位滑杆18滑动,每组辅助导轨滑块9之间的相对距离最长不超过定位滑杆18的长度。防侧翻悬架8的一端与车架13的底部铰接,防侧翻悬架8的另一端与辅助导轨滑块9上的悬架铰接板7铰接。
当车体发生突然倾斜时,车架13的一端将向防侧翻悬架8施加压力,而车架13的另外一端向另一个防侧翻悬架8施加拉力。为了保证车体迅速回位,并且不发生左右小幅晃动,防侧翻悬架8中的弹簧选用压缩弹簧,定位滑杆18的设置可以保证受拉力的一侧的防侧翻悬架8的下端能够与辅助导轨滑块9一起沿着定位滑杆18移动,从而使防侧翻悬架8避免车体突然倾斜带来的刚性拉伸冲击。
本实施例中,车架13分别通过连接结构与主滑动结构和辅助滑动结构铰接,具体地,各连接结构包括第一铰接连接板10和第二铰接连接板16,第一铰接连接板10和第二铰接连接板16通过销轴15铰接,第一铰接连接板10设置在主滑动结构的主导轨固定板21的上部或辅助滑动结构的辅助导轨滑块9上,第二铰接连接板16设置在车架13的侧面。
本实施例中,行走装置4主要包括履带式行走轮,完成驱动无人车行进、转向的功能,同时履带底部平面可以起到稳定车体的作用。
本实施例的适用于山地丘陵的无人车能够横跨单条茶垄进行信息采集作业,能够对地形坡度进行自适应,通过实时的姿态调整,使车体重心始终处于车体中心位置,保证车体不发生倾斜和侧滑,车架13始终保持水平状态,能够将为山地丘陵地区茶树信息的采集提供稳定平台。
实施例二
如图9-图10所示:本实施例公开了一种采用实施例一的适用于山地丘陵的无人车的姿态调整方法,包括以下步骤:
适用于山地丘陵的无人车启动之后,上位机、下位机系统启动并进行程序初始化,通过工控机2的人机交互界面设定阈值角度α;
在车架13的坡度自适应姿态调整过程中,适用于山地丘陵的无人车开始运行后,三轴角度传感器开始获取车架13的倾斜角度,如果倾斜角度>阈值角度α,液压拉杆11电磁阀通电,此时液压拉杆11处于活动状态,上位机将实际倾斜角度与阈值角度α之间的差值被计算成步进电机12的转动圈数,下位机单片机系统根据计算结果转化成相应脉冲,通过电机驱动器对步进电机12进行控制,对车架13进行水平调整,直到车架13实际倾斜角度≤α,步进电机12停止转动,液压拉杆11电磁阀断电复位,液压拉杆11锁定车架13,适用于山地丘陵的无人车坡度自适应姿态调整阶段完成,此控制过程循环进行实现实时动态调整。
本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 适用于丘陵山地拖拉机姿态调整与扭矩分配多功能控制器
- 一种丘陵山地拖拉机车身姿态调整装置及调整方法