检测回馈电路、清洁机器人及其控制方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明属于清洁设备技术领域,具体涉及一种检测回馈电路、清洁机器人及其控制方法。
背景技术
清洁机器人包括主机、水箱及电机等部件,BLDC(无刷直流,Brushless DirectCurrent)电机作为一个高电压大功率的电机,在使用的时候如果直接插到主机内的主板上,很可能因为短路等原因造成清洁机器人的主板或者电池直接短路,导致整个机器烧坏,也可能导致大电流接触瞬间引起火花和对端子的烧灼。
因此,针对上述技术问题,有必要提供一种检测回馈电路、及其控制方法。
发明内容
本发明的目的在于提供一种检测回馈电路、清洁机器人及其控制方法。
为了实现上述目的,本发明一实施例提供的技术方案如下:
一种检测回馈电路,应用于清洁机器人,所述检测回馈电路用于根据反馈信号判断水箱是否插入主机,其包括NMOS管、第一电阻及第二电阻,其中:
所述NMOS管的栅极与反馈接入节点相连,源极接基准电位,漏极接第一电阻后与供电电压相连,漏极接第二电阻后与反馈输出节点相连。
一实施例中,所述检测回馈电路包括:
第一状态,反馈接入节点为低电平时,NMOS管截止,反馈输出节点输出高电平反馈信号;
第二状态,反馈接入节点为高电平时,NMOS管导通,反馈输出节点输出低电平反馈信号。
一实施例中,所述检测回馈电路还包括第三电阻、第四电阻、第五电阻及电容,其中:
所述NMOS管的栅极接第四电阻后与反馈接入节点相连,源极接基准电位,漏极接第一电阻后与供电电压相连,漏极接第二电阻后与反馈输出节点相连,电容的两个极板分别与NMOS管的栅极和源极相连,第三电阻连接于低压和反馈接入节点之间,第五电阻连接于基准电位和反馈接入节点之间。
本发明另一实施例提供的技术方案如下:
一种清洁机器人,所述清洁机器人包括主机及水箱,所述主机包括:
检测单元,用于获取上述检测回馈电路的反馈信号;
判断单元,用于根据反馈信号判断水箱是否插入主机;
控制单元,用于当水箱已插入主机时,控制电机工作。
一实施例中,所述判断单元还用于:
判断反馈信号为高电平或低电平;
若反馈信号为高电平,则判定水箱未插入主机;
若反馈信号为低电平,则判定水箱已插入主机。
一实施例中,所述控制单元还用于:
提供驱动电压以驱动电机;
提供驱动信号以控制电机的转速和/或转向。
本发明又一实施例提供的技术方案如下:
一种清洁机器人的控制方法,其特征在于,所述清洁机器人包括主机及水箱,所述控制方法包括:
获取上述检测回馈电路的反馈信号;
根据反馈信号判断水箱是否插入主机;
若水箱已插入主机,则控制电机工作。
一实施例中,“根据反馈信号判断水箱是否插入主机”具体为:
判断反馈信号为高电平或低电平;
若反馈信号为高电平,则判定水箱未插入主机;
若反馈信号为低电平,则判定水箱已插入主机。
一实施例中,“控制电机工作”包括:
提供驱动电压以驱动电机;
提供驱动信号以控制电机的转速和/或转向。
一实施例中,所述控制方法还包括:
若水箱未插入主机,则重置或关闭系统电源。
与现有技术相比,本发明具有以下优点:
本发明的清洁机器人及其控制方法能够根据检测回馈电路输出的反馈信号判断水箱插入状态,当水箱插入主机后再驱动电机进行工作,减少了机器在装水箱过程的损伤,降低了机器烧坏的风险。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例1中检测回馈电路的示意图;
图2为本发明实施例1中主机的接口示意图;
图3为本发明实施例2中清洁机器人的模块示意图;
图4为本发明实施例3中清洁机器人控制方法的流程示意图。
具体实施方式
以下将结合附图所示的各实施方式对本发明进行详细描述。但该等实施方式并不限制本发明,本领域的普通技术人员根据该等实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
参图1所示,本发明公开了一种检测回馈电路,用于根据反馈信号判断水箱是否插入主机,其包括NMOS管、第一电阻及第二电阻,其中:
所述NMOS管的栅极与反馈接入节点相连,源极接基准电位,漏极接第一电阻后与供电电压相连,漏极接第二电阻后与反馈输出节点相连。
参图3所示,本发明还公开了一种清洁机器人,包括主机10、水箱20及电机30,主机10包括:
检测单元11,用于获取检测回馈电路的反馈信号;
判断单元12,用于根据反馈信号判断水箱是否插入主机;
控制单元13,用于当水箱已插入主机时,控制电机工作。
参图4所示,本发明公开了一种清洁机器人的控制方法,包括:
获取检测回馈电路的反馈信号;
根据反馈信号判断水箱是否插入主机;
若水箱已插入主机,则控制电机工作。
以下结合具体实施例对本发明作进一步说明。
实施例1:
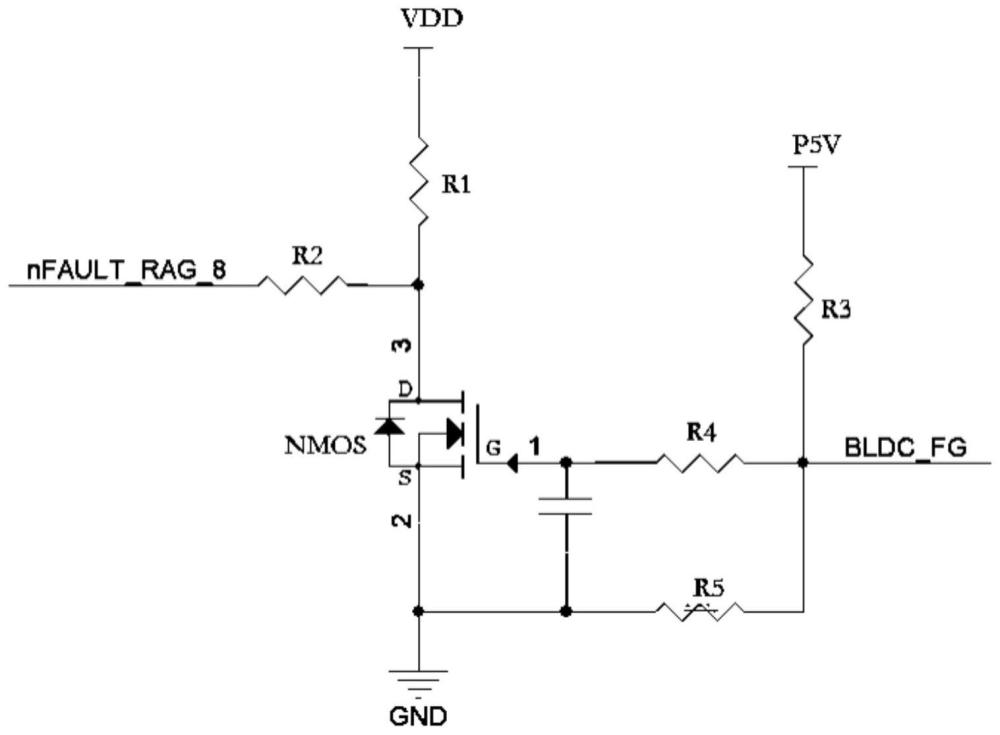
参图1所示为本实施例中检测回馈电路的示意图,其包括1个NMOS管、 1个电容及若干电阻。
具体地,本实施例中包括1个NMOS管、第一电阻R1~第五电阻R5、及1 个电容C,其中:
NMOS管的栅极接第四电阻R4后与反馈接入节点(BLDC_FG)相连,源极接基准电位(本实施例中以地电位GND为例进行说明),漏极接第一电阻R1 后与供电电压VDD相连,漏极接第二电阻R2后与反馈输出节点 (nFAULT_RAG_8)相连,电容C1的两个极板分别与NMOS管的栅极和源极相连,第三电阻R3连接于低压(P5V)和反馈接入节点(BLDC_FG)之间,第五电阻R5连接于基准电位(GND)和反馈接入节点(BLDC_FG)之间。
结合图2所示,本实施例中检测回馈电路集成于主机的主板上,主机10上至少设有电源接口(VDD)、GND接口、低压接口(P5V)、反馈接口 (nFAULT_RAG_8)及其他信号接口。其中,本实施例中的低压接口(P5V)未上电。
检测回馈电路包括:
第一状态,反馈接入节点(BLDC_FG)为低电平时,NMOS管截止,反馈输出节点(nFAULT_RAG_8)输出高电平反馈信号;
第二状态,反馈接入节点(BLDC_FG)为高电平时,NMOS管导通,反馈输出节点(nFAULT_RAG_8)输出低电平反馈信号。
参图3所示为本实施例中清洁机器人的模块示意图,清洁机器人包括主机 10、水箱20及电机30,主机包括检测单元11、判断单元12及控制单元13。具体地:
检测单元11,用于获取实施例1中检测回馈电路的反馈信号;
判断单元12,用于根据反馈信号判断水箱是否插入主机;
控制单元13,用于当水箱已插入主机时,控制电机工作。
优选地,本实施例中的电机30选用高电压大功率的BLDC电机,在其他实施例中也可以选用其他类型的电机。
本实施例中的检测单元11能获取检测回馈电路的反馈信号,判断单元12可根据反馈信号判断水箱是否插入主机;当水箱已插入主机时,控制单元13即可控制电机工作。
具体地,判断单元12判断反馈信号为高电平或低电平;
若反馈信号为高电平,则判定水箱未插入主机;
若反馈信号为低电平,则判定水箱已插入主机。
当水箱已插入主机时,控制单元13提供驱动电压以驱动电机;及,提供驱动信号以控制电机的转速和/或转向。
实施例3:
参图4所示,本实施例中清洁机器人的控制方法包括以下步骤:
S1、获取检测回馈电路的反馈信号。
结合图1所示,本实施例中的检测回馈电路能够通过反馈输出节点 (nFAULT_RAG_8)获取反馈信号。检测回馈电路为实施例1中的检测回馈电路,此处不再进行赘述。
S2、根据反馈信号判断水箱是否插入主机。
获取到反馈信号后,判断反馈信号为高电平或低电平;若反馈信号为高电平,则判定水箱未插入主机;若反馈信号为低电平,则判定水箱已插入主机。
本实施例中的水箱包括水箱驱动板,水箱驱动板中能够提供低压信号(如低压5V信号),低压接口(P5V)未上电,当水箱插入主机后,水箱驱动板能够为反馈接入节点(BLDC_FG)提供低压信号,从而反馈接入节点(BLDC_FG)为高电平;反之,若水箱未插入主机,水箱驱动板则无法为反馈接入节点 (BLDC_FG)提供低压信号,从而反馈接入节点(BLDC_FG)为低电平。
S3、若水箱已插入主机,则控制电机工作。
当判定水箱已插入主机后,即可通过控制单元(MCU)控制电机工作。
具体地,首先提供驱动电压以驱动电机,而后提供驱动信号控制电机的转速和转向。
另外,若判定水箱未插入主机,则重置或关闭系统电源,以避免电机工作。
应当理解的是,上述实施例中以具体的检测回馈电路为例进行说明,但本发明并不限于上述具体的检测回馈电路,凡是能通过反馈信号判定水箱插入状态的电路均属于本发明所保护的范围。
由以上技术方案可以看出,本发明具有以下有益效果:
本发明的清洁机器人及其控制方法能够根据检测回馈电路输出的反馈信号判断水箱插入状态,当水箱插入主机后再驱动电机进行工作,减少了机器在装水箱过程的损伤,降低了机器烧坏的风险。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施例加以描述,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种玻璃清洁机器人及其控制电路
- 一种控制清洁模式的方法和清洁机器人
- 机器人避障的控制电路、机器人及机器人避障方法
- 清洁机器人的行走机构和清洁机器人的行走方法
- 一种机器人控制系统、机器人异常信号检测方法及机器人
- 一种基于水流检测的清洁机器人控制方法及清洁机器人
- 一种用于光伏组件清洁检测机器人的电路控制系统