一种集成全桥开关
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及操纵开关领域,进一步地涉及一种集成全桥开关。
背景技术
全桥互补开关广泛应用于电机驱动领域和测试领域。在电机驱动领域,通过全桥互补开关可以切换电机的转动方向,实现电机顺时针或逆时针的转动;在测试领域,通过全桥互补开关可以切换可编程电压源到待测设备的输入电压极性,以调整待测设备的工作模式。在相关技术中,全桥互补开关需要配置多个单刀单掷、单刀双掷、双刀双掷的开关,并且需要同时进行多个开关开闭状态的调整,才能够实现全桥互补开关功能,其存在结构复杂,安装不变,不易控制等缺陷。
发明内容
针对上述技术问题,本发明的目的在于提供一种集成全桥开关,通过单开关就可实现全桥互补开关功能,具有设计合理,安装便捷,控制简单等优点。
为了实现上述目的,本发明提供一种集成全桥开关,包括:
壳体,固定安置有第一接线端子、第二接线端子、第三接线端子、第四接线端子、第一固定触件组和第二固定触件组,第一固定触件组包括一对电性连接的第一固定触件,第一固定触件与第三接线端子电性连接,第三接线端子用于与输入电压的正端Vin+电性连接,第二固定触件组包括一对电性连接的第二固定触件,第二固定触件与第四接线端子电性连接,第四接线端子用于与输入电压的负端Vin-电性连接;
可动支架,活动连接于壳体内,用于安置第一可动触件组和第二可动触件组,第一可动触件组包括一对电性连接的第一可动触件,第二可动触件组包括一对电性连接的第二可动触件;
操纵件,用于驱动可动支架运动,以改变可动支架的相对位置状态,可动支架处于第一状态时,第一固定触件通过第一可动触件与第一接线端子电性连接,第二固定触件通过第二可动触件与第二接线端子电性连接;可动支架处于第二状态时,第一固定触件通过第二可动触件与第二接线端子电性连接,第二固定触件通过第一可动触件与第一接线端子电性连接。
在一些实施方式中,可动支架呈“工”字形,可动支架中间部分通过连接轴转动连接在壳体中心处,从中间部分的两端分别设置有第一臂状部分和第二臂状部分,两第一可动触件分别连接在第一臂状部分上下两侧,两第二可动触件分别连接在第二臂状部分上下两侧。
在一些实施方式中,第一臂状部分和第二臂状部分的中间部分均呈向外拱起的弧形结构,该弧状结构的圆弧中心线与连接轴的轴线处于同一直线上,第一臂状部分和第二臂状部分分别通过金属件与第一接线端子和第二接线端子电性连接,所述金属件采用导电金属制成,与该弧状结构之间弧面接触。
在一些实施方式中,第一臂状部分和第二臂状部分呈板状结构,分别通过两个弹性金属片与第一接线端子和第二接线端子。
在一些实施方式中,可动支架呈“X”字形,可动支架包括交叉连接的第一臂状部分和第二臂状部分,两第一可动触件分别连接在第一臂状部分的顶部和第二臂状部分的底部,两第二可动触件分别连接在第二臂状部分的顶部和第一臂状部分的底部。
在一些实施方式中,操纵件包括操纵杆、活动杆和弹簧,操纵杆下端设置有轴向长槽,活动杆设置于轴向长槽内,活动杆下端具有接触部分,弹簧设置于活动杆与轴向长槽内底之间,可动支架的中间部分设有一个内凹的槽口部分,活动杆的接触部分能够插入槽口部分。
在一些实施方式中,操纵件包括操纵按键,操纵按键通过连接杆与可动支架的中间部分固定连接。
在一些实施方式中,操纵件包括电磁铁、衔铁和弹簧,电磁铁固定安置于壳体内,弹簧两端分别连接可转支架的中间部分和壳体的内壁,衔铁固定连接可转支架的中间部分上。
在一些实施方式中,操纵件包括操纵杆和滑动件,操纵杆上可转动地安装在壳体上,在操纵杆的下端设有齿轮部分,滑动件滑动安置在壳体中,在滑动件的底部具有推压部分,推压部分于第一臂状部分和第二臂状部分围合形成的空间内,并能与第一臂状部分和第二臂状部分接触,设在滑动件的上表面上的齿形与形成在操纵杆下端处的齿轮部分啮合。
在一些实施方式中,操纵件包括操纵杆和滑动件,操纵杆上可转动地安装在壳体上,操纵杆下端具有接触部分,滑动件滑动安置在壳体中,滑动件的中间部分设有一个内凹的槽口部分,操纵杆的接触部分能够插入槽口部分。
与现有技术相比,本发明所提供的集成全桥开关,有以下有益效果:
本发明所提供的集成全桥开关,第三接线端子用于与输入电压的正端Vin+电性连接,第四接线端子用于与输入电压的负端Vin-电性连,第一固定端子与第三接线端子电性连接,第二固定端子与第四接线端子电性连接,通过调整可动支架的状态,可以使第一接线端子与第三接线端子电性连接,第二接线端子与第四接线端子电性连接,或者,第一接线端子与第四接线端子电性连接,第二接线端子与第三接线端子电性连接,从而改变第一接线端子和第二接线端子输入电压极性,进而实现全桥功能。由于本发明无需配置多个单刀单掷、单刀双掷、双刀双掷,通过单开关就可以实现全桥功能,有设计合理,安装便捷,控制简单等优点。
附图说明
下面将以明确易懂的方式,结合附图说明优选实施方式,对本发明的上述特性、技术特征、优点及其实现方式予以进一步说明。
图1-5是本发明第一个实施例的集成全桥开关不同状态下的结构示意图。
图6是本发明第二个实施例的集成全桥开关的结构示意图。
图7是本发明第一个实施例的采用电力控制的集成全桥开关的结构示意图。
图8是本发明中第一个实施例中一种示例下的第一臂状部分的结构示意图。
附图标号说明:
壳体1;第一臂状部分21;第二臂状部分22;中间部分23;操纵按键24;操纵杆31;齿轮部分311;活动杆36;弹簧33;衔铁34;电磁铁35;活动杆36;金属件37;第一固定触件41;第二固定触件42;第一可动触件51;第二可动触件52;第一接线端子61;第二接线端子62;第三接线端子63;第四接线端子64。
具体实施方式
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
为使图面简洁,各图中只示意性地表示出了与发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
还应当进一步理解,在本申请说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
在本文中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
另外,在本申请的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
如图1-8所示,本发明提出的集成全桥开关,包括盒形的壳体1,壳体1采用绝缘材料制成,如树脂材料制成。壳体1的内壁处设有采用导电金属制成的第一固定触件组和第二固定触件组。
第一固定触件组包括一对电性连接的第一固定触件41,第一固定触件41与第三接线端子63电性连接,第三接线端子63用于与输入电压的正端Vin+电性连接。
第二固定触件组包括一对电性连接的第二固定触件42,第二固定触件42与第四接线端子64电性连接,第四接线端子64用于与输入电压的负端Vin--电性连接。
壳体1内活动连接有可动支架,可动支架上固定设置有第一可动触件组和第二可动触件组,第一可动触件组包括一对电性连接的第一可动触件51,第二可动触件组包括一对电性连接的第二可动触件52,第一可动触件51与第一接线端子61电性连接,第二可动触件52与第二接线端子62电性连接,第一接线端子61、第二接线端子62、第三接线端子63和第四接线端子64均固定连接于壳体1外侧。
操纵件与可动支架传动连接,使得可动支架具有第一状态和第二状态。
可动支架处于第一状态时,第一可动触件51与第一固定触件41接触,第二可动触件52与第二固定触件42接触,由此,第一固定触件41通过第一可动触件51与第一接线端子61电性连接,第二固定触件42通过第二可动触件52与第二接线端子62电性连接,从而使第一接线端子61与第三接线端子63电性连接,第二接线端子62与第四接线端子64电性连接,实现第一接线端子61与输入电压的正端Vin+电性连接,第二接线端子62与输入电压的负端Vin-电性连接。
可动支架处于第二状态时,第一可动触件51与第二固定触件42接触,第二可动触件52与第一固定触件41接触,由此,第一固定触件41通过第二可动触件52与第二接线端子62电性连接,第二固定触件42通过第一可动触件51与第一接线端子61电性连接,从而使第一接线端子61与第四接线端子64电性连接,第二接线端子62与第三接线端子63电性连接,实现第一接线端子61与输入电压的负端Vin-电性连接,第二接线端子62与输入电压的正端Vin+电性连接。
本发明实施例所提供的集成全桥开关,通过调整可动支架的状态,可以改变第一接线端子61和第二接线端子62输入电压极性,从而实现全桥功能。由于本发明通过单开关就可以实现全桥功能,具有设计合理,安装便捷,控制简单等优点。
以下结合附图,对本发明做进一步详细说明。
实施例1
如图1-2所示,在一个示例性的实施例中,集成全桥开关包括盒形的壳体1,壳体1采用绝缘树脂材料制成,壳体1的内壁处设有采用导电金属制成的第一固定触件组和第二固定触件组,第一固定触件组包括一对电性连接的第一固定触件41,两第一固定触件41位置呈相对状态,分别通过嵌入模制成形而固定设置在壳体1上部两侧的内壁上,并与第三接线端子63电性连接,所述第三接线端子63用于与输入电压的正端Vin+电性连接。第二固定触件组包括一对电性连接的第二固定触件42,两第二固定触件42位置呈相对状态,分别通过嵌入模制成形而固定设置在壳体1下部两侧的内壁上,并与第四接线端子64电性连接,所述第四接线端子64用于与输入电压的负端Vin--电性连接。
可以理解,第一固定触件41还可以设置在壳体1下部,相应的,第二固定触件设置在壳体1的上部,在生产时可以根据实际需求对固定触件的位置进行适应性的调整,本实施例以第一固定触件41设置在壳体1上部,第二固定触件42设置在壳体1下部为例。
壳体1内转动连接有可动支架,可动支架形状大致如“工”字形,可动支架中间部分23通过连接轴转动连接在壳体1中心处,中间部分23的两端分别设置有第一臂状部分21和第二臂状部分22,第一臂状部分21和第二臂状部分22均采用导电金属制成,中间部分23至少两端采用绝缘材料制成,以使第一臂状部分21和第二臂状部分22不会发生电性连接。两第一可动触件51分别连接在第一臂状部分21上下两侧,两第二可动触件52分别连接在第二臂状部分22上下两侧,第一臂状部分21与第一接线端子61电性连接,第二臂状部分22与第二接线端子62电性连接。
第一臂状部分21和第二臂状部分22大致呈条状结构,分别通过两个金属件37与第三接线端子63和第四接线端子64电性连接。第一臂状部分21和第二臂状部分22的形状相同,如图8所示,第一臂状部分21的中间部分均呈向外拱起的弧形结构,该弧状结构的圆弧中心线与连接在可动支架中间部分23上的连接轴的轴线处于同一直线上,所述金属件37采用导电金属制成,与弧状结构之间弧面接触,以使无论可动支架是否发生转动,第一臂状部分21上的第一可动触件51始终通过一金属件与第一接线端子61电性连接,第二臂状部分22上的第二可动触件52始终通过另一金属件与第二接线端子62电性连接。
可以理解,第一臂状部分21和第二臂状部分22还可是其他结构,作为一种示例,如图4所示,第一臂状部分21和第二臂状部门均呈板状结构,金属件采用多段弯曲的弹性金属片,一弹性金属片的两端分别固定连接第一臂状部分21和第一接线端子61,另一弹性金属片的两端分别固定连接第二臂状部分22和第二接线端子62。由于弹性金属片可以发生可恢复的形变,因此无论可动支架是否发生转动,第一臂状部分21上的第一可动触件51始终通过一金属件与第一接线端子61电性连接,第二臂状部分22上的第二可动触件52始终通过另一金属件与第二接线端子62电性连接。
图2所示为可动支架顺时针旋转至预定位置时的状态,图1所示为可动支架逆时针旋转至预定位置时的状态。
当可动支架顺时针旋转至预定位置时,第一可动触件51与第二固定触件42接触,第二可动触件52与第一固定触件41接触,由此,第一固定触件41通过第二可动触件52与第二接线端子62电性连接,第二固定触件42通过第一可动触件51与第一接线端子61电性连接。
当可动支架逆时针旋转至预定位置时,第二可动触件52与第二固定触件42接触,第一可动触件51与第一固定触件41接触,由此,第一固定触件41通过第一可动触件51与第一接线端子61电性连接,第二固定触件42通过第二可动触件52与第二接线端子52电性连接。
操纵件用于驱动可动支架转动。作为一种示例,如图4所示,操纵件包括操纵杆31、活动杆36和弹簧33,操纵杆31下端设置有轴向长槽,活动杆36设置于轴向长槽内,活动杆36下端具有接触部分321,接触部分321的截面形状大致呈半圆形,弹簧33设置于活动杆36与轴向长槽内底之间,可动支架的中间部分23设有一个内凹的槽口部分(未标注),活动杆36的接触部分321能够插入槽口部分。
如此,通过转动操纵杆31,能够使活动杆36的接触部分321作用于中间部分23的槽口部分,使可动支架进行顺时针或逆时针转动,从而使第一固定触件41与第二接线端子62连接,第二固定触件42与第一接线端子61连接,或第一固定触件41与第一接线端子61连接,第二固定触件42与第二接线端子62连接,从而调整第一接线端子61和第二接线端子62的输入电压极性,实现全桥开关功能。
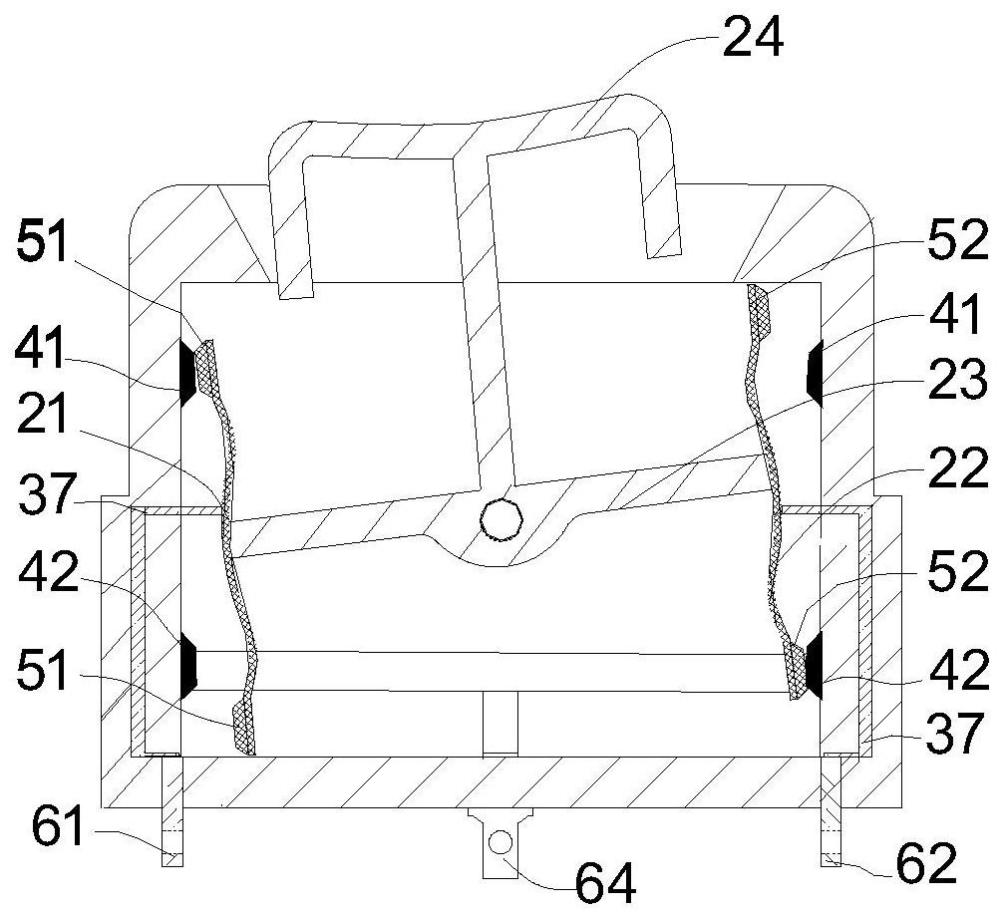
作为另一种示例,如图1所示,操纵板包括操纵按键24,操纵按键24通过连接杆与可动支架的中间部分23固定连接。通过按压操纵按键24能够使可动支架顺时针转动进行逆时针传动,从而达到前文所述的调整第一接线端子61和第二接线端子62的输入电压极性的目的,实现全桥开关功能。
本实施例中的操纵件还可采用电动控制的方式驱动可转支架转动。如图7所示,作为一种示例,操纵件包括电磁铁35、衔铁34和弹簧33,电磁铁35固定安置于壳体1内,弹簧33两端分别连接可转支架的中间部分23和壳体1的内壁,衔铁34固定连接可转支架的中间部分23上。电磁铁35通电时,衔铁34在电磁铁35产生的电磁力作用下,向靠近电磁铁35的方向运动,从而带动可动支架进行顺时针或逆时针转动,可动支架转动过程中使得弹簧33被逐渐拉伸或压缩。当衔铁34与电磁铁35接触后,可动支架运动到行程终端。可以理解,可动支架的转动方向与电磁铁35和衔铁34的安放位置有关,如,电磁铁35通电后,可动支架将逆时针转动。还其他一些实现方式中,电磁铁通电后,可动支架将顺时针转动。可动支架顺时针转动和逆时针转动产生的效果前文已经进行了详细描述,为节省篇幅,此处不再进行赘述。
当电磁铁35断电后,电磁场消失,衔铁34上的电磁力归零,弹簧33通过自身的弹性形对可转支架产生推力,使可转支架向相反方向运动,带动衔铁34完成复位运动,电磁铁35完成释放过程。
与采用纯机械驱动的操纵件的结构,通过电力控制可转支架的翻转运动,控制更加的方便与轻松,也更容易实现全桥机电开关的装配自动化。
可以理解,以上仅是对操纵件的具体结构进行示例性的说明,本申请对操纵件的结构并不做具体限定,生产加工时可以根据需求合理限定操纵杆的结构。
实施例2
图6是本发明第二个实施例的集成全桥开关的结构示意图。
本实施例中的集成全桥开关,集成全桥开关包括盒形的壳体1,壳体1采用绝缘树脂材料制成,壳体1的内壁处设有采用导电金属制成的第一固定触件组和第二固定触件组,第一固定触件组包括一对电性连接的第一固定触件41,两第一固定触件41位置呈相对状态,分别通过嵌入模制成形而固定设置在盒形壳体1上部两侧的内壁上,并与第三接线端子63电性连接,第三接线端子63用于与输入电压的正端Vin+电性连接。第二固定触件组包括一对电性连接的第二固定触件42,两第二固定触件42位置呈相对状态,分别通过嵌入模制成形而固定设置在盒形壳体1下部两侧的内壁上,并与第四接线端子64电性连接,第四接线端子64用于与输入电压的负端Vin--电性连接。
壳体1内转动连接有可动支架,可动支架由第一臂状部分21和第二臂状部分22交叉连接而成,形状大致如字母“X”形,第一臂状部分21和第二臂状部分22交叉部分转动连接在壳体1中心处,两第一可动触件51分别连接在第一臂状部分21的顶部和第二臂状部分22的底部,两第二可动触件52分别连接在第二臂状部分22的顶部和第一臂状部分21的底部,两第一可动触件51之间电性连接,并与设置在壳体1外侧的第一接线端子61通过弹性金属片电性连接,两第二可动触件52之间电性连接,并与设置在盒形壳体1外侧的第二接线端子62通过另一弹性金属片电性连接。
当顺时针旋转可动支架至预定位置时,位于第二臂状部分22顶部的第二可动触件52与第一固定触件41接触,位于第二臂状部分22底部的第一可动触件51与第二固定触件42接触,位于第一臂状部分21顶部的第一可动触件51与第一固定触件41之间,以及位于第一臂状部分21底部的第二可动触件52与第二固定触件42之间相分离。由此,第一固定触件41通过第二可动触件52与第二接线端子62电性连接,第二固定触件42通过第一可动触件51与第一接线端子61电性连接。
当逆时针旋转可动支架至预定位置时,位于第一臂状部分21顶部的第一可动触件51与第一固定触件41接触,位于第一臂状部分21底部的第二可动触件52与第二固定触件42接触,位于第二臂状部分22顶部的第二可动触件52与第一固定触件41之间,第二臂状部分22底部的第一可动触件51与第二固定触件42接触之间相分离。由此,第一固定触件41通过第一可动触件51与第一接线端子61电性连接,第二固定触件42通过第二可动触件52与第二接线端子62电性连接。
操纵件用于驱动可动支架转动。作为一种示例,操纵件包括操纵杆31,操纵杆31采用绝缘树脂材料制成,其上端的操作部分从壳体1顶部的开口中向上伸出,操纵杆31上可转动地安装在位于壳体1中的圆柱形轴(未标注)上,在操纵杆31的下端设有齿轮部分311。
绝缘树脂制成的滑动件32可左右滑动并安置在壳体1中。在滑动件32的底部具有推压部分321,推压部分32位于第一臂状部分21和第二臂状部分22围合形成的空间内,并能与第一臂状部分21和第二臂状部分22接触。设在滑动件32的上表面上的齿形与形成在操纵杆31下端处的齿轮部分311啮合,使得操纵杆31以圆柱形轴为支点转动时,滑动件17可在壳体1内进行左右滑动。
操纵杆31转向右侧时,滑动件17就向左滑动,滑动件17的推压部分321就推压第一臂状部分21,使可转支架逆时针转动,实现第一固定触件41通过第一可动触件51与第一接线端子61电性连接,第二固定触件42通过第二可动触件52与第二接线端子62电性连接。
操纵杆31转向左侧时,滑动件17就向右滑动,滑动件17的推压部分321就推压第二臂状部分22,使可转支架顺时针转动,实现第一固定触件41通过第二可动触件52与第二接线端子62电性连接,第二固定触件42通过第一可动触件51与第一接线端子61电性连接。
本实施例中的操纵件还可采用如实施例1中的活动杆与槽口部分的配合形式。具体地,操纵件包括操纵杆,操纵杆下端具有接触部分,接触部分的截面形状大致呈半圆形,滑动件17的中间部分设有一个内凹的槽口部分,操纵杆的接触部分能够插入槽口部分。
如此,通过转动操纵杆,能够使操纵杆的接触部分作用于滑动件的槽口部分,使滑动件向左或向右运动,以带动可动支架进行顺时针或逆时针转动,从而使第一固定触件41与第二接线端子62连接,第二固定触件42与第一接线端子61连接,或第一固定触件41与第一接线端子61连接,第二固定触件42与第二接线端子62连接,以调整对接线端子输入电压极性,实现全桥开关功能。
与操纵杆与滑动件之间通过齿轮传动的方式相比,操纵杆与和滑动件的加工变得更为简便,就能更容易地制造开关,还能方便地将开关的装配自动化等。
可以理解,以上仅是对操纵件的具体结构进行示例性的说明,本申请对操纵件的结构并不做具体限定,生产加工时可以根据需求合理限定操纵杆的结构。
可以理解,在实施例1、2中,描述的集成全桥开关既可以是开关式开关,也可以是常闭式开关。作为一种示例,实施例1、2中的集成全桥开关是常闭式开关,自然状态下,固定触件和可动触件彼此断开,通过调整可动支架的相对位置状态,可以实现将可动支架由自然状态调整到第一状态或第二状态,以及第一状态或第二状态调整回自然状态。
应当说明的是,上述实施例均可根据需要自由组合。以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 通过将经编码符号字符从本地字符集转换成全局字符集来读取二维符号的方法和装置
- 通过将经编码符号字符从本地字符集转换成全局字符集来读取二维符号的方法和装置