片料机
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及片料贴附技术领域,特别是涉及一种片料机。
背景技术
目前,在生产过程中,需要将不同大小的片料贴附在产品上,片料都是一堆叠放,人工在取料或贴附片料过程中,会导致取料或片料贴附程序紊乱,并且片料贴附的位置无法保证每次都在同一个位置,从而造成片料贴附精度较低,导致片料贴附作业不规范,而且人工取料存在效率低、成本高,取料过程中片料质量得不到保证,容易造成片料褶皱或弄脏,从而导致不良品率较高的问题。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种片料机,用于解决现有技术电子产品片料贴附过程中存在贴附程序紊乱、贴附精度较低、作业不规范、效率低、成本高以及不良品率较高的问题。
为实现上述目的及其他相关目的,本发明提供一种片料机,包括:
传送模组,用于运输产品,所述传送模组上设有用于贴附片料的贴附工位;
待料机构,所述待料机构包括顶升组件和待料平台,所述待料平台用于堆放片料,所述待料平台与所述顶升组件连接,所述顶升组件用于驱动所述待料平台沿竖向移动;
转运机构,包括第一直线移载模组、转运模组和中转平台,所述转运模组与所述第一直线移载模组滑动连接,所述转运模组用于转运片料,所述中转平台沿所述第一直线模组的长度方向靠近所述待料平台设置,所述第一直线移载模组用于驱动所述转运模组将所述待料平台上的片料转运至所述中转平台;
三轴移载机构,所述三轴移载机构上设有提取模组,所述三轴移载机构用于驱动所述提取模组移动,所述提取模组用于提取所述中转平台上的片料并贴附到所述传送模组上的产品上;
撕膜机构,包括第二直线移载模组和撕膜模组,所述撕膜模组滑动设置在所述第二直线移载模组上,所述撕膜模组用于抓取所述提取模组上提取片料的底膜,所述第二直线移载模组用于驱动所述撕膜模组沿所述第二直线模组的长度方向移动;
视觉模组,包括第一视觉模块和第二视觉模块,所述第一视觉模块用于获取所述提取模组上片料位置的图像信息,所述第二视觉模组用于获取所述传送模组上产品位置的图像信息。
可选地,所述传送模组包括进料段、片料贴附段和出料段,所述贴附工位设置在所述片料贴附段上,所述片料贴附段与所述出料段之间设有阻挡定位模组,所述片料贴附段沿宽度方向上的一侧设有侧推定位模组,另一侧设有导向模组,且所述侧推定位模组与所述导向模组均靠近所述阻挡定位模组设置,所述阻挡定位模组用于对所述片料贴附段上的产品沿所述传送模组的传动方向阻挡定位,所述侧推定位模组用于对所述片料贴附段上的产品沿所述传送模组的宽度方向侧推定位,所述导向模组用于对所述片料贴附段上的产品移动导向。
可选地,所述进料段的传送起始端设有第一检测元件,所述第一检测元件用于检测产品进料信号,触发所述阻挡定位模组开启动作,所述片料贴附段的传送起始端设有第二检测元件,所述第二检测元件用于检测产品进入所述片料贴附段的进料信号,触发所述侧推定位模组执行侧推动作,所述片料贴附段的传送末尾端设有第三检测元件,所述第三检测元件用于检测产品达到贴附工位的到位信号,触发所述传送模组停机等待,所述出料段的传送末尾端设有第四检测元件,所述第四检测元件用于检测所述产品的出料信号。
可选地,所述待料平台沿周向分布有至少两个夹料分离部件,所述夹料分离部件用于分离所述转运模组上的夹料,所述夹料分离部件上设有高度检测元件,所述高度检测元件用于检测所述待料平台上片料的堆料高度,当所述待料平台上堆料高度变化时,触发所述顶升组件驱动所述待料平台上升至堆料预设高度。
可选地,所述转运模组包括转运驱动部件和转运吸附部件,所述转运驱动部件与所述第一直线模组滑动连接,所述转运吸附部件与所述转运驱动部件连接,所述转运驱动部件用于驱动所述转运吸附部件沿所述第一直线模组的高度方向移动,所述转运吸附部件用于吸取所述待料平台上的片料,所述中转平台上沿周向分布有多个限位块,多个所述限位块在所述中转平台上形成片料的存放区域。
可选地,所述三轴移载机构包括横轴模组、纵轴模组和竖轴模组,所述纵轴模组与所述横轴模组滑动连接,所述横轴模组用于驱动所述纵轴模组沿横向移动,所述竖轴模组与所述纵轴模组滑动连接,所述纵轴模组用于驱动所述竖轴模组沿纵向移动,所述提取模组与所述竖轴模组滑动连接,所述竖轴模组用于驱动所述提取模组沿竖向移动。
可选地,所述提取模组包括提取驱动部件和提取吸附部件,所述提取驱动部件与所述提取吸附部件连接,所述提取吸附部件用于吸附所述中转平台上的片料,所述提取驱动部件用于驱动所述提取吸附部件周向转动调整所述提取吸附部件的角度,以调整所述提取吸附部件上片料的贴附角度。
可选地,所述第二直线移载模组沿长度方向上的一端设有第一限位检测元件、另一端设有第二限位检测元件,所述第一限位检测元件与所述第二限位检测元件之间设有第一原点检测元件,且所述第一原点检测元件靠近所述第二限位检测元件设置,所述撕膜模组包括两个撕膜安装部件、撕膜连接部件和撕膜部件,两个所述撕膜安装部件对称设置在所述撕膜连接部件沿长度方向上的两侧,所述撕膜部件设置在所述撕膜安装部件上,所述撕膜连接部件与所述第二直线移载模组滑动连接。
可选地,所述撕膜安装部件上设有用于安装所述撕膜部件的安装孔,所述安装孔为腰型孔,所述撕膜部件通过锁紧件与所述安装孔锁紧,所述撕膜部件为夹爪气缸。
可选地,还包括机架,所述机架用于安装所述传送模组、所述待料机构、所述转运机构、所述三轴移载机构、所述撕膜机构及所述视觉模组,所述机架上还设有三色灯模组和显示器模组,所述三色灯模组用于显示所述片料机的工作状态,所述显示器模组用于显示所述视觉模组获取的图像信息,所述第一视觉模块设置在所述机架上,所述第二视觉模块设置在所述三轴移载机构上,所述第二视觉模块的设置高度大于所述第一视觉模块的设置高度。
如上所述,本发明具有以下有益效果:通过作业人员手动将片料堆放在待料机构的待料平台上,当产品流入片料机,通过传送模组将流入片料机内的产品运输至贴附工位,转运机构的第一直线移载模组驱动转运模组沿第一直线模组的长度方向移动至待料平台上方,转运模组吸取待料平台上的片料后,通过第一直线移载模组将转运模组移动至中转平台上方,将转运模组提取的片料释放到中转平台上等待取料,转运模组通过第一直线移载模组复位,三轴移载机构驱动提取模组移动至中转平台上方吸取中转平台上的片料,三轴移载机构带动提取模组移动至撕膜机构上方,第二直线移载模组驱动撕膜模组移动至提取模组上片料的一端抓取片料上的底膜,通过第二直线移载模组驱动撕膜模组沿第二直线移载模组长度方向上的一端移动,将提取模组上提取片料的底膜撕掉,三轴移载机构驱动提取模组移动至第一视觉模块上方,第一视觉模块通过拍照获取提取模组上片料位置的图像信息,三轴移载机构驱动提取模组移动至第二视觉模块下方,第二视觉模块对贴附工位上产品位置的图像信息,根据第一视觉模块与第二视觉模块获取的图像信息,系统调整提取模组的角度,从而确保片料贴附的精度,提取模组角度调整完成后,三轴模组驱动提取模组将片料贴附在产品上,贴附完成,各机构复位,产品流入下一道工序。通过采用本申请的技术方案,有效地提高了片料的贴附精度,自动化完成取料及贴附工序,有效地提高了片料的贴附效率、降低了人工成本的投入,有效避免了作业人员取料易造成片料损坏的风险,具有提高产品良率的有益效果。
附图说明
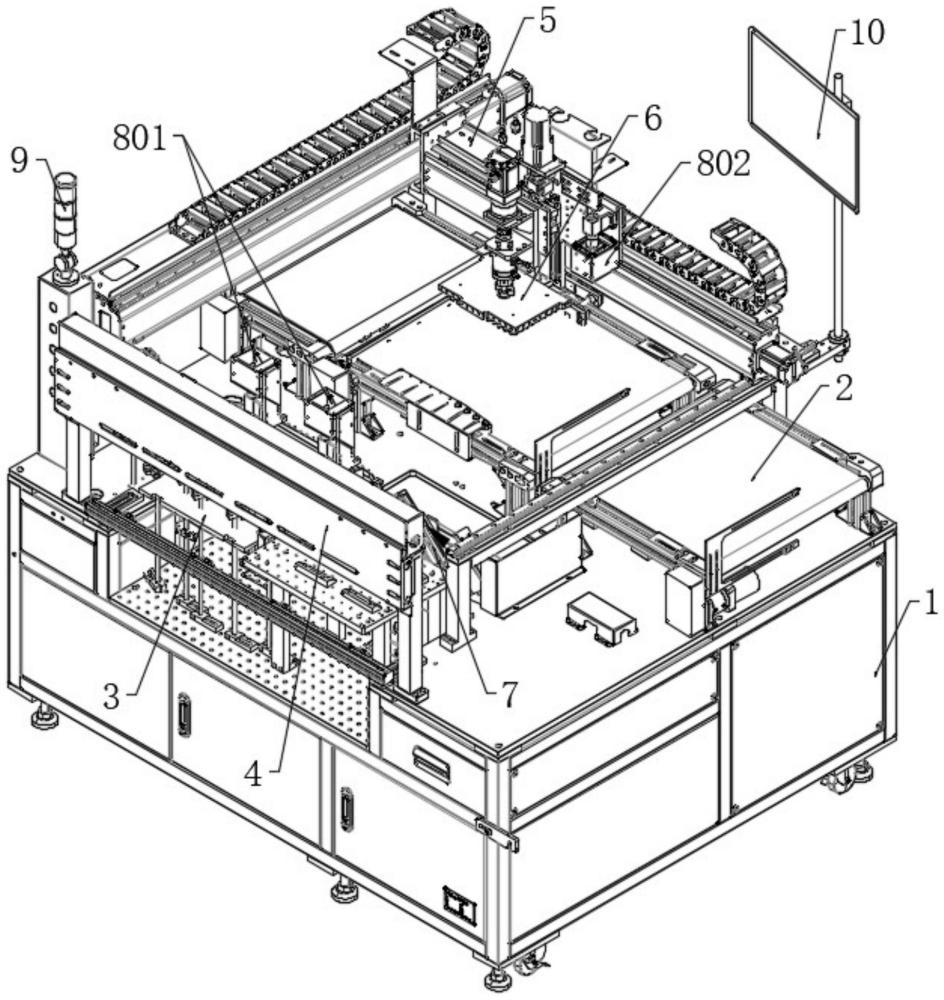
图1显示为本发明实施例结构示意图;
图2显示为图1中传送模组的结构示意图;
图3显示为图1中待料机构的结构示意图;
图4显示为图1中转运机构的结构示意图;
图5显示为图1中三轴移载机构的结构示意图;
图6显示为图1中提取模组的结构示意图;
图7显示为图1中撕膜机构的结构示意图。
零件标号说明
机架1、传送模组2、进料段201、第一检测元件201a、片料贴附段202、贴附工位202a、第二检测元件202b、第三检测元件202c、出料段203、第四检测元件203a、阻挡定位模组204、阻挡驱动部件204a、阻挡部件204b、侧推定位模组205、侧推定位驱动部件205a、侧推定位部件205b、导向模组206、导向轮206a、待料机构3、顶升组件301、顶升驱动部件301a、安装块301b、丝杠301c、第三限位检测元件301d、第四限位检测元件301e、第二原点检测元件301f、待料平台302、夹料分离部件303、高度检测元件303a、转运机构4、第一直线移载模组401、转运模组402、转运驱动部件402a、转运吸附部件402b、转运安装支架402c、转运安装槽402d、中转平台403、限位块403a、三轴移载机构5、横轴模组501、纵轴模组502、竖轴模组503、提取模组6、提取驱动部件601、提取吸附部件602、联轴器603、气压接头604、撕膜机构7、第二直线移载模组701、第一限位检测元件701a、第二限位检测元件701b、第一原点检测元件701c、撕膜模组702、撕膜安装部件702a、撕膜连接部件702b、撕膜部件702c、安装孔702d、视觉模组8、第一视觉模块801、第二视觉模块802、三色灯模组9、显示器模组10。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
请参阅图1至图7。需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
在对本发明实施例进行详细叙述之前,先对本发明的应用环境进行描述。本发明的技术主要是应用于片料贴附技术领域。本发明是用于解决现有技术电子产品片料贴附过程中存在贴附程序紊乱、贴附精度较低、作业不规范、效率低、成本高以及不良品率较高的问题。
请结合图1至图7所示,本发明提供一种片料机,包括:
在本申请的一示例性实施例中,传送模组2,用于运输产品,传送模组2上设有用于贴附片料的贴附工位202a;待料机构3,待料机构3包括顶升组件301和待料平台302,待料平台302用于堆放片料,待料平台302与顶升组件301连接,顶升组件301用于驱动待料平台302沿竖向移动;转运机构4,包括第一直线移载模组401、转运模组402和中转平台403,转运模组402与第一直线移载模组401滑动连接,转运模组402用于转运片料,中转平台403沿第一直线模组的长度方向靠近待料平台302设置,第一直线移载模组401用于驱动转运模组402将所述待料平台302上的片料转运至中转平台403;三轴移载机构5,三轴移载机构5上设有提取模组6,三轴移载机构5用于驱动提取模组6移动,提取模组6用于提取中转平台403上的片料并贴附到传送模组2上的产品上;撕膜机构7,包括第二直线移载模组701和撕膜模组702,撕膜模组702滑动设置在第二直线移载模组701上,撕膜模组702用于抓取提取模组6上提取片料的底膜,第二直线移载模组701用于驱动撕膜模组702沿第二直线模组的长度方向移动;视觉模组8,包括第一视觉模块801和第二视觉模块802,第一视觉模块801用于获取提取模组6上片料位置的图像信息,第二视觉模组8用于获取传送模组2上产品位置的图像信息。
在本实施例中,通过作业人员手动将片料堆放在待料机构3的待料平台302上,当产品流入片料机,通过传送模组2将流入片料机内的产品运输至贴附工位202a,转运机构4的第一直线移载模组401驱动转运模组402沿第一直线模组的长度方向移动至待料平台302上方,转运模组402吸取待料平台302上的片料后,通过第一直线移载模组401将转运模组402移动至中转平台403上方,将转运模组402提取的片料释放到中转平台403上等待取料,转运模组402通过第一直线移载模组401复位,三轴移载机构5驱动提取模组6移动至中转平台403上方吸取中转平台403上的片料,三轴移载机构5带动提取模组6移动至撕膜机构7上方,第二直线移载模组701驱动撕膜模组702移动至提取模组6上片料的一端抓取片料上的底膜,通过第二直线移载模组701驱动撕膜模组702沿第二直线移载模组701长度方向上的一端移动,将提取模组6上提取片料的底膜撕掉,三轴移载机构5驱动提取模组6移动至第一视觉模块801上方,第一视觉模块801通过拍照获取提取模组6上片料位置的图像信息,三轴移载机构5驱动提取模组6移动至第二视觉模块802下方,第二视觉模块802对贴附工位202a上产品位置的图像信息,根据第一视觉模块801与第二视觉模块802获取的图像信息,系统调整提取模组6的角度,从而确保片料贴附的精度,提取模组6角度调整完成后,三轴模组驱动提取模组6将片料贴附在产品上,贴附完成,各机构复位,产品流入下一道工序。通过采用本申请的技术方案,有效地提高了片料的贴附精度,自动化完成取料及贴附工序,有效地提高了片料的贴附效率、降低了人工成本的投入,有效避免了作业人员取料易造成片料损坏的风险,具有提高产品良率的有益效果。
在本申请的一示例性实施例中,传送模组2包括进料段201、片料贴附段202和出料段203,贴附工位202a设置在片料贴附段202上,片料贴附段202与出料段203之间设有阻挡定位模组204,片料贴附段202沿宽度方向上的一侧设有侧推定位模组205,另一侧设有导向模组206,且侧推定位模组205与导向模组206均靠近阻挡定位模组204设置,阻挡定位模组204用于对片料贴附段202上的产品沿传送模组2的传动方向阻挡定位,侧推定位模组205用于对片料贴附段202上的产品沿传送模组2的宽度方向侧推定位,导向模组206用于对片料贴附段202上的产品移动导向。
在本实施例中,传送模组2包括沿传动方向依序设置的进料段201、片料贴附段202和出料段203,传动模组为电机带动的皮带传动,片料贴附段202上的贴附工位202a即为阻挡定位模组204、侧推定位模组205及导向模组206围合形成的机械定位工位,将产品在片料贴附段202上机械定位,即给产品一个确定的贴附工位202a,能够有效的提升片料与产品的贴附精度,阻挡定位模组204包括阻挡驱动部件204a和用于阻挡产品的片状阻挡部件204b,阻挡驱动部件204a为顶升气缸,阻挡部件204b与阻挡驱动部件204a的轴连接,侧推定位模组205包括侧推定位驱动部件205a和侧推定位部件205b,侧推定位驱动部件205a为双轴气缸,侧推定位部件205b与侧推定位驱动部件205a的轴连接,导向模组206包括沿传送模组2传动方向排列的多个导向轮206a,用于产品的导向模组206接触时移动导向,避免导向模组206与产品之间的摩擦力过大,造成产品损伤。
在本申请的一示例性实施例中,进料段201的传送起始端设有第一检测元件201a,第一检测元件201a用于检测产品进料信号,触发阻挡定位模组204开启动作,片料贴附段202的传送起始端设有第二检测元件202b,第二检测元件202b用于检测产品进入片料贴附段202的进料信号,触发侧推定位模组205执行侧推动作,片料贴附段202的传送末尾端设有第三检测元件202c,第三检测元件202c用于检测产品达到贴附工位202a的到位信号,触发传送模组2停机等待,出料段203的传送末尾端设有第四检测元件203a,第四检测元件203a用于检测产品的出料信号。
在本实施例中,进料段201传送起始端上设有用于安装第一检测元件201a且开口朝向传送模组2宽度方向的“U”型支架,“U”型支架的两个端头上分别设有一个第一检测元件201a,第一检测元件201a为对射传感器,第一检测元件201a用于检测产品流入片料机传送模组2的进料信号,当第一检测元件201a检测到产品信号,触发阻挡驱动部件204a的轴伸出带动阻挡部件204b上升至预设高度后,等待产品到位,片料贴附段202上设有用于安装第二检测元件202b且开口朝向传送模组2宽度方向的“U”型支架,“U”型支架的两个端头上分别设有一个第二检测元件202b,第二检测元件202b为对射传感器,第二检测元件202b用于检测产品流入片料贴附段202的进料信号,触发侧推定位驱动部件205a的轴伸出,带动侧推定位部件205b将产品定位在片料贴附段202沿宽度方向上的一侧,当产品接触导向轮206a时,导向模组206用于对产品移动导向,当产品与阻挡定位模组204接触,且侧推定位模组205定位完成时,设置在片料贴附段202传送末尾端的第三检测元件202c检测到产品的到位信号,触发传送模组2停机等待;出料段203传送末尾端上设有用于安装第四检测元件203a且开口朝向传送模组2宽度方向的“U”型支架,“U”型支架的两个端头上分别设有一个第四检测元件203a,第四检测元件203a为对射传感器,第四检测元件203a用于检测产品流出片料机传送模组2的出料信号,系统告知前序工位可以流入下一个产品进行片料贴附作业。
在本申请的一示例性实施例中,待料平台302沿周向分布有至少两个夹料分离部件303,夹料分离部件303用于分离转运模组402上的夹料,夹料分离部件303上设有高度检测元件303a,高度检测元件303a用于检测待料平台302上片料的堆料高度,当待料平台302上堆料高度变化时,触发顶升组件301驱动待料平台302上升至堆料预设高度。
在本实施例中,夹料分离部件303为毛刷,当转运模组402吸取待料平台302上的片料时,由于片料较轻、较薄,存在静电夹料的情况,通过在待料平台302周向设置的夹料分离部件303,能够有效的将因静电夹带吸取的片料剥离下来,具有避免夹料的有益效果,当片料被转运模组402吸附取走后,待料平台302上的堆料高度会发生状态变化,此时设置在夹料分离部件303上的高度检测元件303a检测到堆料的高度变化信号,触发顶升组件301工作,驱动待料平台302沿竖向移动至预设高度,直到高度检测元件303a信号消失,顶升组件301停止工作,通过高度检测元件303a与顶升组件301的配合工作,使得转运模组402每次吸附待料平台302上的片料高度都在同一个位置,有效地补偿了转运模组402的升降行程,提高了转运模组402的工作效率。
在另一示例性实施例中,顶升组件301为电机驱动的丝杠301c传动模组,顶升组件301包括用于安装顶升驱动部件301a和丝杠301c的安装块301b,安装块301b上还设有用于安装顶升滑块的滑动杆,顶升滑块与丝杆螺纹连接,顶升滑块与滑动杆滑动连接,待料平台302与顶升滑块连接,通过顶升驱动部件301a驱动丝杆转动,带动待料平台302沿竖向移动,安装块301b较窄的一侧面上设有第三限位检测元件301d、第四限位检测元件301e和第二原点检测元件301f,第三限位检测元件301d设置在所述安装块301b沿高度方向上的一端,第四限位检测元件301e设置在安装块301b沿高度方向上的另一端,第二原点检测元件301f设置在第三限位检测元件301d和第四限位检测元件301e之间,且第二原点检测元件301f靠近第四限位检测元件301e设置,第三限位检测元件301d用于检测待料平台302的上极限,第四限位检测元件301e用于检测用于检测待料平台302的下极限,原点检测元件用于检测片料堆放最合适位置的信号。
在本申请的一示例性实施例中,转运模组402包括转运驱动部件402a和转运吸附部件402b,转运驱动部件402a与第一直线模组滑动连接,转运吸附部件402b与转运驱动部件402a连接,转运驱动部件402a用于驱动转运吸附部件402b沿第一直线模组的高度方向移动,转运吸附部件402b用于吸取待料平台302上的片料,中转平台403上沿周向分布有多个限位块403a,多个限位块403a在所述中转平台403上形成片料的存放区域。
在本实施例中,第一直线模组采用电机带动同步带同步轮传动,转运模组402通过第一直线模组驱动沿第一直线模组的长度方向移动,从而实现转运模组402在待料平台302与中转平台403之间移动,转运模组402包括转运驱动部件402a和转运吸附部件402b,转运驱动部件402a为气缸,转运吸附部件402b为吸盘,转运吸附部件402b通过设置在转运安装支架402c上,转运安装支架402c与转运驱动部件402a的轴连接,转运安装支架402c上设有多个用于安装吸盘的转运安装槽402d,转运支架上设有八个转运安装槽402d,转运模组402包括八个转运吸附部件402b,转运安装槽402d为腰型孔结构,通过改变吸盘与转运安装槽402d的锁紧位置,使得转运模组402可以兼容不同大小的片料转运作业,有效提高了转运模组402的兼容性,转运吸附部件402b的吸盘通过与真空泵连接,形成负压,完成转运过程片料的吸附作业,当转运模组402移动至中转平台403上方时,转运吸附部件402b释放片料;中转平台403上开设有多个用于与限位块403a锁紧件配合的配合孔,通过改变限位块403a的锁紧位置,可以调节限位块403a在中转平台403上围合的片料存放区域,从而兼容不同大小的片料存放作业。
在本申请的一示例性实施例中,三轴移载机构5包括横轴模组501、纵轴模组502和竖轴模组503,纵轴模组502与横轴模组501滑动连接,横轴模组501用于驱动纵轴模组502沿横向移动,竖轴模组503与纵轴模组502滑动连接,纵轴模组502用于驱动竖轴模组503沿纵向移动,提取模组6与竖轴模组503滑动连接,竖轴模组503用于驱动提取模组6沿竖向移动。
在本实施例中,横轴模组501、纵轴模组502及竖轴模组503均为电机驱动的丝杠301c滑块传动模组,纵轴模组502与横轴模组501的滑块连接,竖轴模组503与纵轴模组502的滑块连接,提取模组6与竖轴模组503的滑块连接,通过采用三轴移载机构5,使得提取模组6能够在三个维度上移动,进一步具有提高片料与产品的贴附精度的有益效果。
在本申请的一示例性实施例中,提取模组6包括提取驱动部件601和提取吸附部件602,提取驱动部件601与提取吸附部件602连接,提取吸附部件602用于吸附中转平台403上的片料,提取驱动部件601用于驱动提取吸附部件602周向转动调整提取吸附部件602的角度,以调整提取吸附部件602上片料的贴附角度。
在本实施例中,提取驱动部件601为电机,提取吸附部件602通过联轴器603与提取驱动部件601的输出轴连接,提取吸附部件602上部设有用于与气压泵连接的气压接头604,使得提取吸附部件602形成负压吸附片料,通过提取驱动部件601驱动提取吸附部件602沿周向转动,可以调节提取部件的角度,从而调节提取吸附部件602上提取片料的角度,以使片料的贴附角度与产品的安装位置对齐,进一步具有提高片料与产品贴附精度的有益效果。
在本申请的一示例性实施例中,第二直线移载模组701沿长度方向上的一端设有第一限位检测元件701a、另一端设有第二限位检测元件701b,第一限位检测元件701a与第二限位检测元件701b之间设有第一原点检测元件701c,且第一原点检测元件701c靠近第二限位检测元件701b设置,撕膜模组702包括两个撕膜安装部件702a、撕膜连接部件702b和撕膜部件702c,两个撕膜安装部件702a对称设置在撕膜连接部件702b沿长度方向上的两侧,撕膜部件702c设置在撕膜安装部件702a上,撕膜连接部件702b与第二直线移载模组701滑动连接。
在本实施例中,第二直线移载模组701为电机驱动的丝杠301c滑块传动模组,第一限位检测元件701a用于检测撕膜模组702移动的左极限,第二限位检测元件701b用于检测撕膜模组702移动的右极限,避免撕膜模组702与机架1撞击损伤,第一原点检测元件701c用于检测撕膜机构7的复位等待位置信号,撕膜连接部件702b与第二直线移载模组701的滑块连接两个撕膜安装部件702a分别设置在撕膜连接部件702b沿长度方向上的两侧,且与撕膜连接部件702b垂直设置。
在本申请的一示例性实施例中,撕膜安装部件702a上设有用于安装撕膜部件702c的安装孔702d,安装孔702d为腰型孔,撕膜部件702c通过锁紧件与安装孔702d锁紧,撕膜部件702c为夹爪气缸。
在本实施例中,通过撕膜安装部件702a上设置的腰型安装孔702d,可以调节撕膜部件702c撕取底膜的撕取角度,从而满足撕膜模组702撕取不同片料底膜的撕膜需求,撕膜部件702c为手指夹爪气缸。
在本申请的一示例性实施例中,还包括机架1,机架1用于安装传送模组2、待料机构3、转运机构4、三轴移载机构5、撕膜机构7及视觉模组8,机架1上还设有三色灯模组9和显示器模组10,三色灯模组9用于显示片料机的工作状态,显示器模组10用于显示视觉模组8获取的图像信息,第一视觉模块801设置在机架1上,第二视觉模块802设置在三轴移载机构5上,第二视觉模块802的设置高度大于第一视觉模块801的设置高度。
在本实施例中,三轴移载机构5驱动提取模组6将中转平台403上的片料吸附提取后,将提取模组6移至撕膜机构7上方撕掉底膜,在移动至第一视觉模块801,第一视觉模块801拍照获取提取模组6上片料位置的图像信息,将提取模组6上片料位置图像信息上传到显示器模组10后,将提取模组6移动到产品上方,设置在竖轴模组503滑块上的第二视觉模块802,对传送模组2上的产品进行拍照获取产品位置的图像信息,第二视觉模块802将产品位置的图像信息发送至显示器模组10,作业人员或显示器模组10集成的控制模块根据片料位置的图像信息及产品位置的图像信息,确定提取模组6的调整角度,通过提取驱动部件601驱动提取吸附部件602转动调节至确定的角度处,然后竖轴模组503下移将片料贴附在产品上,完成产品的片料贴附作业,产品流出片料机,进行下一件产品的贴附作业;三色灯模组9包括片料机正常运作状态显示、片料机异常报警状态显示及作业人员手动停机状态显示,便于分辨片料机的工作状态。
工作原理,通过作业人员手动将片料堆放在待料机构3的待料平台302上,当产品流入片料机,通过传送模组2将流入片料机内的产品运输至贴附工位202a,转运机构4的第一直线移载模组401驱动转运模组402沿第一直线模组的长度方向移动至待料平台302上方,转运模组402吸取待料平台302上的片料后,通过第一直线移载模组401将转运模组402移动至中转平台403上方,将转运模组402提取的片料释放到中转平台403上等待取料,转运模组402通过第一直线移载模组401复位,三轴移载机构5驱动提取模组6移动至中转平台403上方吸取中转平台403上的片料,三轴移载机构5带动提取模组6移动至撕膜机构7上方,第二直线移载模组701驱动撕膜模组702移动至提取模组6上片料的一端抓取片料上的底膜,通过第二直线移载模组701驱动撕膜模组702沿第二直线移载模组701长度方向上的一端移动,将提取模组6上提取片料的底膜撕掉,三轴移载机构5驱动提取模组6移动至第一视觉模块801上方,第一视觉模块801通过拍照获取提取模组6上片料位置的图像信息,三轴移载机构5驱动提取模组6移动至第二视觉模块802下方,第二视觉模块802对贴附工位202a上产品位置的图像信息,根据第一视觉模块801与第二视觉模块802获取的图像信息,系统调整提取模组6的角度,从而确保片料贴附的精度,提取模组6角度调整完成后,三轴模组驱动提取模组6将片料贴附在产品上,贴附完成,各机构复位,产品流入下一道工序。通过采用本申请的技术方案,有效地提高了片料的贴附精度,自动化完成取料及贴附工序,有效地提高了片料的贴附效率、降低了人工成本的投入,有效避免了作业人员取料易造成片料损坏的风险,具有提高产品良率的有益效果。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种用于叠片机的分料装置和叠片机
- 烫片机废料片带收料、切片及集片一体结构及烫片机
- 烫片机盘带尾料收料结构及烫片机