基于硬磁柔性驱动体摆动驱动的仿生机器鱼及其制造方法
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及一种海洋特种机器人技术领域,具体地说,涉及一种基于硬磁柔性驱动体驱使尾鳍部摆动的仿生机器鱼及其制造方法。
背景技术
仿生机器鱼是一类在结构和运动上模仿鱼类的水下机器人,主要用于对水下环境进行监测。近年来,新型仿生机器鱼的研究成果不断涌现,并基于不同的驱动方式驱使尾鳍部按照预定规律摆动,从而在水里进行游动,这些驱动方式具体包括电机驱动、液压或气压驱动、形状记忆合金(SMA)驱动、介电弹性体(DEs)驱动及离子聚合物金属复合材料(IPMC)驱动等,例如,公开号为CN110065607A等的专利文献所公开技术方案为电机驱动。
然而,前述这些常用驱动方式会在对应的问题,例如电机驱动的仿生机器鱼普遍采用多关节传动的刚性结构,结构复杂,噪声与震动较大,无法混入鱼群以进行近距离观测;液压或气压驱动难以摆脱泵的限制,难以实现无束缚游动;SMA等新型材料存在形变微小和驱动力不足等缺陷,难以精确地模拟鱼类运动。
为了解决上述技术问题,在公开为CN101148194A的专利文献中公开了一种双尾超磁仿生机器鱼,包括鱼身和对称连接在鱼身两端的双尾;其中,鱼尾由超磁致伸缩材料贴或镀在主体材料片上构成,且两条鱼尾具有不同的固有频率。该机器鱼在运行过程中,通过调节外部磁场的频率与强度来调整前尾和后尾摆动时的波动状态,从而控制机器鱼向前或向后游动。然而,上述仿生机器鱼采用的超磁致伸缩材料具有形变微小的缺点,导致机器鱼无法逼真地模拟鱼类的形态和运动;此外,该机器鱼需要外部大范围区域磁场的持续驱动,该磁场区域为该鱼的可活动范围区域,因而无法在开阔水域进行监测作业。
发明内容
本发明的目的是提供一种基于硬磁柔性驱动体进行尾鳍部摆动驱动的仿生机器鱼,以能在在形态和运动上更好地模拟鱼类,且能实现大范围与无约束的水下监测作业;
本发明的另一目的是提供一种用于制造上述仿生机器鱼的方法。
为了实现上述主要目的,本发明提供的仿生机器鱼基于硬磁柔性驱动体驱动尾鳍部摆动,具体结构包括鱼头部及与鱼头部固连的鱼身部,鱼头部包括水密壳体及安装在水密壳体内的供电单元与控制单元;鱼身部包括与水密壳体固连的板状柔性支架,固连在板状柔性支架的尾端部上的尾鳍部,及受控制单元控制而驱使尾鳍部摆动的摆动驱动单元;摆动驱动单元包括固设在板状柔性支架左侧的左侧柔性伸缩驱动单元,及固设在板状柔性支架右侧的右侧柔性伸缩驱动单元;每个柔性伸缩驱动单元均包括磁致伸缩体,及缠绕地固定在磁致伸缩体外的励磁线圈组;励磁线圈组的轴向沿鱼身长度方向布置;磁致伸缩体由掺杂有磁性颗粒的柔性聚合物制成,同一磁致伸缩体内的所有磁性颗粒的磁化方向相同,且两个磁致伸缩体内磁性颗粒的磁化方向相同;水密壳体包括流线型表面的锥型壳部及用于封闭锥型壳部的固连板体壳部;磁致伸缩体的表面由与板状柔性支架的外板面邻接固连的内贴合板面,与固连板体壳部的外板面邻接固连的前端贴合板面,及外鼓状表壳体部所围成;沿鱼头指向鱼尾的方向,磁致伸缩体的横截面面积递减;在鱼身部外附着有一层覆盖励磁线圈组的凝胶薄层;控制单元用于向励磁线圈组施加变化的励磁电流,且使左右两侧励磁线圈组内的磁场磁极方向相反。
在上述技术方案中,采用硬磁柔性材料所制成的磁致伸缩材料与缠绕在其外的线圈组进行构建,以充分地利用硬磁柔性材料所具有的制备方法简便,且组分比例可调等优先,并利用该硬磁柔性材料构建驱动单元,以实现对仿生机器鱼的速度、姿态与转向进行调整,且硬磁柔性材料的变形动力由缠绕在材料自身表面的电磁线圈提供,与现有技术中采用电机或液压等方式构建动力单元相比,或者基于大范围磁场进行驱动的结构相比,本发明的驱动结构简单、噪音较低且高度仿生,更利于监测作业中的隐蔽,即在能保证优良的电磁驱动性能而逼真地模拟鱼体的力学特性的同时,该机器鱼无需要外部大范围磁场的持续驱动,而能在开阔水域进行监测作业。此外,两侧励磁线圈组内的磁场磁极方向相反,从而使对侧线圈组内的磁场在本侧线圈组内进行叠加,从而能有效地提高整体的驱动性能;而且基于其磁致伸缩的渐缩结构,及摆动位移的累加特征,从而能在尾段部形成更大的摆动范围。
具体的方案为凝胶薄层的外表面为流线型表面。该技术方案能有效的减少缠绕线圈组所产生的水阻。
优选的方案为板状柔性支架为薄板状柔性支架。该技术方案能尽量地减少整体刚度,而提高摆动驱动幅度。
优选的方案为板状柔性支架由多块浮体板依次连接成的连串结构,相邻两块浮体板之间通过竖向铰轴铰接。该技术方案能有效地平衡整体的浮力结构。
优选的方案为每一磁致伸缩体上均布设有多匝间距布置的励磁线圈组。
进一步的方案为在同一磁致伸缩体上,沿鱼身长度方向,多个励磁线圈组等间距布置。
进一步的方案为磁致伸缩体由第一段体与第二段体交替邻接而成,第一段体为由掺杂有磁性颗粒的柔性聚合物制成,第二段体为由未掺杂有磁性颗粒的柔性聚合物制成;励磁线圈组仅缠绕于第一段体外,且每段第一段体外至少布设有一匝励磁线圈组;控制单元向每匝励磁线圈组独立供电,并控制尾鳍部形成行波摆动。
优选的方案为左侧柔性伸缩驱动单元与右侧柔性伸缩驱动单元关于板状柔性支架对称布置。
优选的方案为磁致伸缩体内形成有两端封闭的减轻孔,减轻孔的长度方向沿鱼身长度方向布置;且在竖向上,下半身减轻孔密度的总体积小于上半身的减轻孔的总体积;相较控制单元,重量较重的供电单元布设在固连板体壳部的内侧面上,并使重心位于下半身上。该技术方案通过设置减轻孔以提供浮力,从而提高柔性聚合物的可选范围。
为了实现上述另一目的,本发明提供一种用于制造上述仿生机器鱼的方法,该制造方法具体包括以下步骤:
采用混合未磁化的钕铁硼粉末、液态PDMS与固化剂按比例混合,基于挤压成型的三维打印技术,打印出具有多个减轻孔的磁致伸缩体;并在打印过程中对已打印的磁性颗粒进行磁化或完成打印后进行整体磁化;磁化步骤包为对打印出的磁性颗粒施加定向高强脉冲磁场;
按照预定线圈组的排布方案,在两侧磁致伸缩体外各缠绕多匝线圈组,且两侧上的线圈组串联布置;
采用硅胶材料,基于三维打印技术,打印出为一体结构的固连板体壳部与板状柔性支架;采用光敏树脂材料,基于光固化三位打印技术,打印出锥型壳部,并在锥型壳部内布设零部件安装用于连接座结构;
将线圈导线穿过设于固连板体壳部上的穿线孔,再利用粘接剂将前端贴合板面与固连板体壳部的外板面粘接固连,及将内贴合板面与板状柔性支架的外板面粘接固连;
利用密封胶将导线与穿线孔之间的间隙进行水密填充处理,并将供电单元与控制单元固定安装至锥型壳部内部后,再利用粘接剂将固连板体壳部与锥型壳部固连;
使用乙醇有机溶液对组装出机器鱼本体进行表面处理,再将其浸入二甲基丙烯酰胺水凝胶单体溶液中;使用紫外线照射表面附着有一层水凝胶单体溶液的机器鱼本体,以在机器鱼本体外附着一层覆盖励磁线圈组的凝胶薄层。
附图说明
图1为本发明实施例1中仿生机器鱼的立体结构示意图;
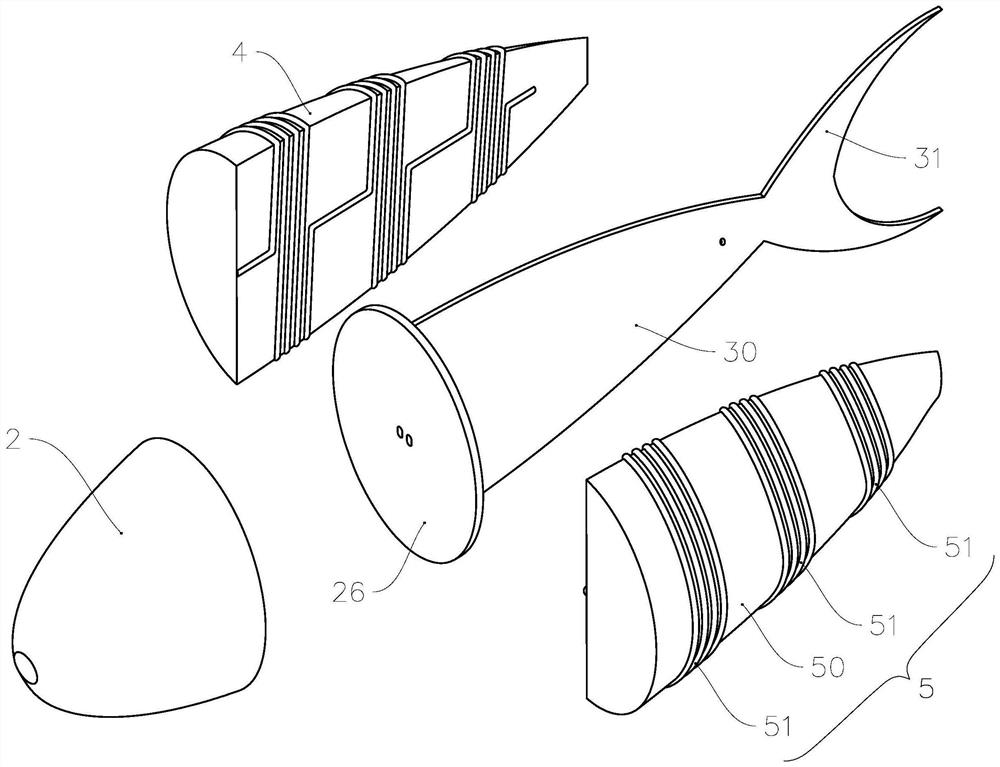
图2为本发明实施例1中仿生机器鱼的结构分解示意图;
图3为本发明实施例1中鱼头部壳的结构示意图;
图4为本发明实施例1中线圈组的连接结构示意图;
图5为本发明实施例1中侧柔性伸缩驱动单元的结构示意图;
图6为本发明实施例1中仿生机器鱼在其线圈组未通电的情况下的结构示意图;
图7为本发明实施例1中仿生机器鱼在其线圈组通电的情况下摆动状态结构示意图;
图8为本发明实施例2中仿生机器鱼的结构分解示意图;
图9为本发明实施例2中仿生机器鱼在其线圈组通电的情况下摆动状态结构示意图;
图10为本发明实施例中磁致伸缩体的横截面结构示意图;
图11为本发明实施例3中固连板体壳部、板状柔性支架及尾鳍部的结构图。
实施例1
参见图1至图7,本发明仿生机器鱼1基于硬磁柔性驱动体驱动尾鳍部摆动,其结构具体包括鱼头部2及与该鱼头部2固连的鱼身部3。
如图2至图4所示,鱼头部2包括水密壳体20及安装在该水密壳体20内的供电单元22、控制单元23与数据采集单元24,水密壳体20包括为流线型表面的锥型壳部25及用于封闭该锥型壳部25的固连板体壳部26;鱼身部3横截面为长轴沿竖向布置的椭圆结构,具体包括与水密壳体20固连的板状柔性支架30,固连在板状柔性支架30的尾端部上的尾鳍部31,及受控制单元23控制而驱使尾鳍部31摆动的摆动驱动单元32。其中,锥型壳部25形成喇叭口结构,而固连板体壳部26用于封闭该喇叭口,从而便于组装,为椭圆状的该喇叭口的具体尺寸为沿竖向幅值的长轴长度为180毫米,沿横向布置的短轴长度为120毫米;头部壳体厚度为4毫米。
在本实施例中,尾鳍部31采用月牙型尾鳍的形状,其特定展弦比能够减小鱼尾摆动的诱导阻力,减少能量损耗;板状柔性支架30和尾鳍部31厚度为3毫米,沿鱼体纵轴的总长度为350毫米。
在本实施例中,数据采集单元24可选用摄像头、温度传感器等进行构建,在本实施例中为采用摄像头进行构建,其通过设于锥型壳部25上的暴露口250进行图像采集,并在镜头前端与暴露口250之间采用密封胶进行密封处理;供电单元22包括高能量密度的锂电池及保护电路,用于为整个仿生机器鱼1的正常工作提供电能;控制单元23为控制电路板,其上布设有处理器、传感器信号处理单元、存储单元及逆变模块;逆变模块用于将供电单元22所输出的电流逆变成预定频率的交流电,并供给摆动驱动单元32。此外,控制单元23可以根据需要而配置通信模块、定位模块等。可以有现有塑料等材料进行注塑成型,也可以采用三维打印技术进行打印,例如采用光敏树脂材料,利用光固化打印技术进行打印。在安装位置布局时,相较控制单元23,重量较重的供电单元22布设在固连板体壳部26的内侧面上,并使重心位于下半身上。
摆动驱动单元32包括固设在板状柔性支架30左侧的左侧柔性伸缩驱动单元4,及固设在板状柔性支架30右侧的右侧柔性伸缩驱动单元5。对于板状柔性支架30,其具体可采用硅胶材料等进行制造;优选采用导磁性能较好的柔性材料进行制造;在本实施例中,板状柔性支架为薄板状柔性支架,以能尽量地减少整体刚度,而提高摆动驱动幅度。
在整体外形结构上,本实施例中的左侧柔性伸缩驱动单元4与右侧柔性伸缩驱动单元5关于板状柔性支架30对称布置,在下述描述中将以左侧柔性伸缩驱动单元4为例进行示例性说明,具体为左侧柔性伸缩驱动单元4均包括磁致伸缩体6,及缠绕地固定在该磁致伸缩体6外的多匝励磁线圈组7;对应的,右侧柔性伸缩驱动单元5均包括磁致伸缩体50,及缠绕地固定在该磁致伸缩体50外的多匝励磁线圈组51。其中,励磁线圈组7的轴向沿鱼身长度方向布置,从形成磁极方向大致沿鱼身长度方向,具体为三匝励磁线圈组7,且为等间距布置,从而可有效地降低线圈对摆动刚度的影响;也可以为一匝,从前端缠绕至后端;磁致伸缩体6由掺杂有磁性颗粒的柔性聚合物制成,具体为通过在聚二甲基硅氧烷(PDMS)中掺杂钕铁硼粉末,可以采用模具进行固化成型,也可采用三维打印技术进行打印成型;并在成型之后或成型过程中,采用强脉冲磁场磁化对钕铁硼粉末进行磁化,从而是同一磁致伸缩体内的所有磁性颗粒的磁化方向相同,在本实施例中,左侧柔性伸缩驱动单元4与右侧柔性伸缩驱动单元5上的磁致伸缩体内磁性颗粒的磁化方向相同。
如图5所示,磁致伸缩体6的表面由与板状柔性支架30的外板面邻接固连的内贴合板面60,与固连板体壳部26的外板面邻接固连的前端贴合板面61,及外鼓状表壳体部62所围成;且沿鱼头指向鱼尾的方向,磁致伸缩体6的横截面面积递减。
为了减少所缠绕的线圈所产生水流阻力,在鱼身部外附着有一层覆盖励磁线圈组的凝胶薄层。
此外,如图10所示,磁致伸缩体6与磁致伸缩体50内形成有两端封闭的减轻孔,以磁致伸缩体6为例,减轻孔605的长度方向沿鱼身长度方向布置;且在竖向上,下半身减轻孔密度的总体积小于上半身的减轻孔的总体积,从而使鱼身的重心位于下半身,而有效确保其在水里的稳定性;对于形成减轻孔的结构,可以为采用三维打印技术进行打印,也可以采用发泡技术发泡处多块空隙密度不同的块体结构,在粘接拼接成,并在外部附着一层密封的柔性表层,例如采用水凝胶形成表层结构。
对于上述结构的仿生机器鱼1,可以采用多种技术方案进行制造,在本实施例中采用下述步骤制造该仿生机器鱼1:
(1)采用混合未磁化的钕铁硼粉末、液态PDMS与固化剂按比例混合,基于挤压成型的三维打印技术,打印出具有多个减轻孔的磁致伸缩体6与磁致伸缩体50;并在打印过程中对已打印的磁性颗粒进行磁化或在完成打印后进行整体磁化。
(2)按照预定线圈组的排布方案,在两侧磁致伸缩体外各缠绕励磁线圈组7与励磁线圈组51,且使两侧上的线圈组串联布置,具体结构如图4所示。
(3)采用硅胶材料,基于三维打印技术,打印出为一体结构的固连板体壳部26与板状柔性支架30;采用光敏树脂材料,基于光固化三位打印技术,打印出锥型壳部25,并在锥型壳部25内布设零部件安装用于连接座结构,这些连接座结构可以打印出后进行粘接固连,也可与锥型壳部25一体打印。
(4)将线圈导线穿过设于固连板体壳部26上的穿线孔,再利用粘接剂将前端贴合板面61与固连板体壳部26的外板面粘接固连,及将内贴合板面60与板状柔性支架30的外板面粘接固连。
(5)利用密封胶将导线与穿线孔之间的间隙进行水密填充处理,并将供电单元22、数据采集单元24与控制单元23固定安装至锥型壳部25的内部后,再利用粘接剂将固连板体壳部26与锥型壳部25固连。
(6)使用乙醇有机溶液对组装出机器鱼本体进行表面处理,再将其浸入二甲基丙烯酰胺水凝胶单体溶液中;使用紫外线照射表面附着有一层水凝胶单体溶液的机器鱼本体,以在机器鱼本体外附着一层覆盖励磁线圈组的凝胶薄层。
在工作过程中,对于本实施例中,控制单元23用于向励磁线圈组7与励磁线圈组50施加变化的励磁电流,且使左右两侧励磁线圈组内的磁场磁极方向相反,由于两侧磁致伸缩体的磁化方向相同,从而可使两侧磁致伸缩体中,一者处于伸长状态,而另一者处于缩短状态,从而可驱使尾鳍部31左右摆动,摆动图如图6及图7所示,在交流电压的作用下,机器鱼的鱼身将在相对方向上交替摆动,以实现往复地弯曲变形摆动而拍打水体,以实现对机器鱼的推进,并可通过控制电压的幅值和频率来控制游动速度与转向;通过在柔性驱动体上缠绕励磁线圈组的驱动方式,能有效地避免外部磁场驱动源造成的移动空间约束问题。在本实施例中,磁场磁极方向被配置为N极指向S极的方向或S极指向N极的方向。
此外,在机器鱼前进状态下,输入直流电,控制鱼体保持某一弯曲状态,实现机器鱼的转向运动。通过控制驱动电压的大小,可以调节转向速率。
实施例2
作为对本发明实施例2的说明,以下仅对与上述实施例1的不同之处进行说明。
参见图8,在鱼体结构较长的情况下,磁致伸缩体7与磁致伸缩体50由第一段体与第二段体交替邻接而成;以磁致伸缩体50的结构为例,第一段体501为由掺杂有磁性颗粒的柔性聚合物制成,而第二段体502为由未掺杂有磁性颗粒的柔性聚合物制成,二者以图中的虚线为界进行固连;励磁线圈组51仅缠绕于第一段体501外,且每段第一段体501外至少布设有一匝励磁线圈组51;控制单元向每匝励磁线圈组独立供电,并控制尾鳍部形成行波摆动,摆动结构如图9所示。
实施例3
作为对本发明实施例3的说明,以下仅对与上述实施例2的不同之处进行说明。
参见图11,板状柔性支架30由多块浮体板301依次连接成的连串结构,相邻两块浮体板30之间通过竖向铰轴302铰接,该技术方案能有效地平衡整体的浮力结构,以减少磁致伸缩体内所需的减轻空隙的量,从而提高整体伸缩量。
在上述实施例中,对于磁致伸缩体的尾部部分的制造方法,可采用“分层浇筑”的方式,在鱼尾部沿轴线的不同区段内使用弹性模量不同的硅胶等柔性聚合物作为基体,使得尾部沿轴线方向的不同部分具有不同的刚度,利于实现接近真实的鱼尾部形状的弯曲,对于不同刚度分段的制造,也可基于三维打印技术,采用不同刚度材料进行打印;优选为越靠近尾鳍部的部分采用刚度越低的材料进行打印。
对于磁致伸缩体尾部区域变刚度段设置,可以通过改变其内空隙密度来实现,对此可采用“失蜡法”制造,也可采用三维打印技术进行打印;从而在鱼尾部形成特定形状的空腔,以改变鱼尾部的等效刚度和质量,从而将鱼尾部的固有频率配置在理想的值,且主振型符合功能预期。此外还可以通过这种方法改变整个仿生鱼的平均密度,从而使仿生鱼的密度和水的密度相当,实现在水中的悬浮。
此外,可通过在磁致伸缩体外布设金属环以增强对线圈产生磁场的束缚能力,使磁感线聚集在仿生鱼尾部内。
对于尾部谐振频率较低的机器鱼,可以通过对不同励磁线圈组独立施加与之对应频率的励磁电流,从而提高摆动幅度。对于仿生鱼尾部的线圈可以连接到头部一个RLC振荡电路中,以降低电源功耗,提高能量的利用率。