施工管理系统以及施工管理方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种管理通过被远程操作的至少一台工程机械在作业现场进行作业的进度的施工管理系统以及施工管理方法。
背景技术
近年来,随着工程机械的操作人员的老龄化,操作人员短缺变得越来越严重。因此,对于操作人员不用到作业现场而远程操作工程机械的远程操作系统的期待日益增高。
由于在远程操作系统不仅可以从国内的所有地区甚至还可以从国外招募操作人员,能更方便地争取到操作人员。而且,由于在远程操作系统可以利用时差来执行作业,即在白天让国内的操作人员进行作业,在晚上让外国的操作人员进行作业,可以谋求大幅度缩短作业时间。
然而,在远程操作系统,因为操作人员没有在作业现场,存在多个操作人员同时开始作业的情况,所以统筹在作业现场的作业的施工管理者很难管理在该作业现场的作业的进度。
另外,在专利文献1中虽然公开了在远离作业现场的地方可以确认多个作业组的每个作业组的作业的进度的管理系统,但是因为不是以远程操作系统为前提,所以既不会产生如上所述的问题也无法解决该问题。
现有技术文献
专利文献
专利文献1:日本专利公开公报特开2002-108975号公报。
发明内容
本发明的目的在于提供一种可以容易地管理利用被远程操作的至少一台工程机械在作业现场进行作业的进度的施工管理系统以及施工管理方法。
本发明的一实施方式涉及的施工管理系统,是管理通过被远程操作的至少一台工程机械在作业现场进行作业的进度的施工管理系统,包括:管理者终端,用于让施工管理者管理通过所述至少一台工程机械进行作业的进度;服务器,与所述管理者终端可通信地连接;以及,至少一个作业信息获取装置,与所述至少一台工程机械相对应地而设置,获取与所述至少一台工程机械的作业的状况相关的作业信息,并将所述作业信息输入到所述服务器,其中, 所述管理者终端具备:作业计划信息生成部,基于所述施工管理者输入的内容生成与所述至少一台工程机械的作业计划有关的作业计划信息,并将所述作业计划信息输入到所述服务器,其中,所述作业计划信息包含针对每个远程操作所述至少一台工程机械的操作人员而设定的、各操作人员远程操作的工程机械的作业内容和对于对该作业内容的作业时间,所述服务器具备:进度信息生成部,基于所述作业信息和所述作业计划信息,针对所述至少一台工程机械中的每台工程机械生成表示操作人员的作业的进度的进度信息,并将所述进度信息输入到所述管理者终端,向所述施工管理者提示所述进度信息。
附图说明
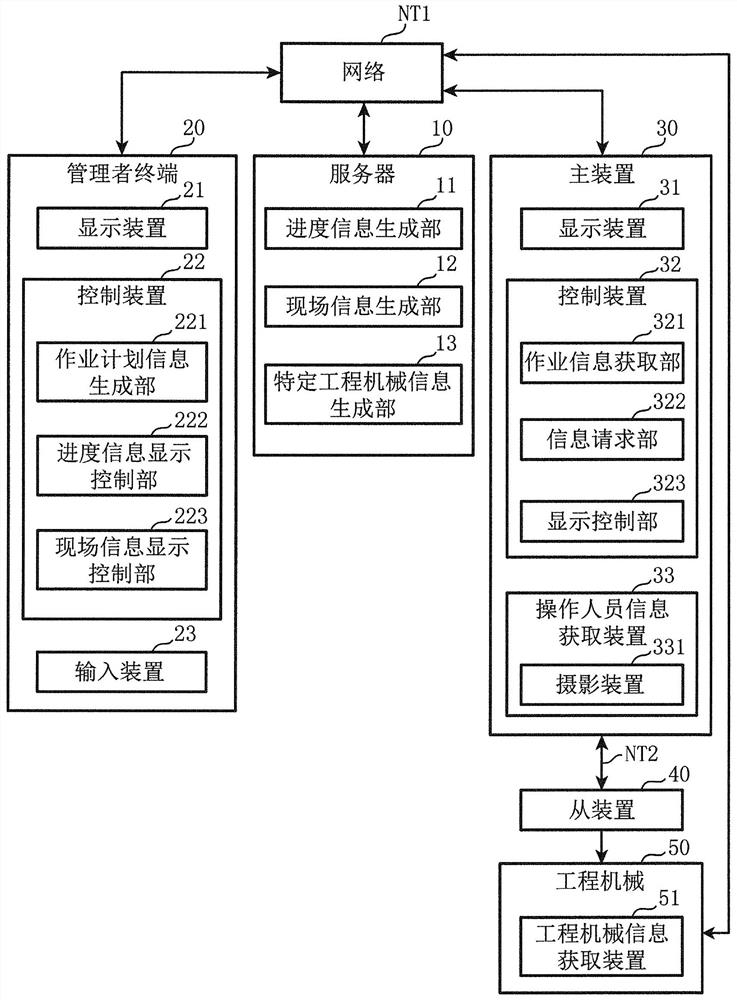
图1是表示基于本发明的实施方式的施工管理系统的整体构成的方框图。
图2A是表示在施工管理者输入作业计划信息时显示在管理者终端上的画面的一个例子的示意图。
图2B是图2A所示的表的放大图。
图3是表示施工管理者在管理通过多台工程机械进行作业的进度时显示在管理者终端上的画面的一个例子的示意图。
图4是表示施工管理者在管理通过多台工程机械进行作业的进度时显示在管理者终端上的画面的一个例子的示意图。
图5是表示显示在主装置的显示装置上的工程机械信息的一个例子的示意图。
图6是表示显示在主装置的显示装置上的工程机械信息的一个例子的示意图。
图7是表示显示在主装置的显示装置上的工程机械信息的一个例子的示意图。
图8是表示基于本发明的实施方式进行施工管理系统的处理的流程图。
具体实施方式
以下,参照附图对本发明的实施方式进行详细说明。
图1是表示本发明的实施方式涉及的施工管理系统的整体构成的方框图。施工管理系统是管理通过分别被远程操作的多台工程机械50在作业现场进行的作业的进度的系统。施工管理系统具备服务器10、管理者终端20、与多台工程机械50中的每一台工程机械对应而设置的多个主装置30。
服务器10是向施工管理者提示被多个主装置30中的每一个主装置远程操作的工程机械50进行作业的进度的装置。在此,施工管理者是管理在作业现场的作业的进度的人员,例如,作业承包公司的员工。另外,作业承包公司既可以是与作业发包公司相同的公司,也可以是与作业发包公司不同的公司。另外,关于服务器10的详细情况将后述。
管理者终端20是施工管理者用于管理被多个主装置30中的每一个主装置远程操作的工程机械进行作业的进度的装置。另外,关于管理者终端20的详细情况将后述。
主装置30是远程操作操作工程机械50的远程操作装置的一个例子。在本实施方式中,主装置30由模拟了工程机械50的操纵席的操作装置构成,与工程机械50的操纵杆相同的操纵杆被配置在与工程机械50相同的位置。
主装置30包含操作人员就座的座椅、配置在座椅的前方用于显示工程机械50的周围的图像(周围图像)的显示装置31、负责主装置30的整体控制的控制装置32、操作人员信息获取装置33。
操作人员一边观察显示在显示装置31的周围图像,一边操作操纵杆来远程操作工程机械50。操作人员例如是作业承包公司所雇佣的员工。
控制装置32例如由CPU等处理器构成,负责主装置30的整体控制。控制装置32包含作为作业信息获取装置的作业信息获取部321、信息请求部322、显示控制部323。
作业信息获取部321获取作业信息。作业信息是有关被主装置30远程操作的工程机械50进行作业的状况的信息。作业信息例如是工程机械50进行作业的时间。具体而言,作业时间例如是在当天从开始作业到目前为止针对每个作业内容的作业的累计时间。
另外,作业信息并不局限于工程机械50进行作业的时间。可以根据工程机械50的作业的内容采用各种各样的信息作为作业信息。
例如,在工程机械50的作业的内容是“挖掘”的情况下,可以采用挖掘的砂土的量作为作业信息。在采用挖掘的砂土的量作为作业信息的情况下,可以通过与应该挖掘的砂土的量进行比较来掌握作业的进度。
而且,也可以采用从空中拍摄了实际的作业现场的图像作为作业信息。在这种情况下,通过与施工图D1进行对照可以掌握作业的进度。
而且,作业信息获取部321将获取到的作业信息输入到服务器10。具体而言,通过让主装置30的通信装置经由网络NT1将作业信息发送到服务器10,从而作业信息被输入到服务器10。
信息请求部322生成信息请求信号并将所生成的信息请求信号输入到服务器10。
信息请求信号是用于向服务器10请求特定工程机械信息的信号。特定工程机械信息是与显示在该主装置30具有的显示装置31的工程机械50相关的信息,所述工程机械50是多台工程机械50之中被该主装置30远程操作的工程机械50以外的工程机械50。即,特定工程机械信息是与存在于被该主装置30远程操作的工程机械50的周围且被显示在该主装置30具有的显示装置31的工程机械50相关的信息。特定工程机械信息包含与后述的工程机械信息共通的信息。特定工程机械信息包含多台工程机械50之中与该工程机械信息对应的工程机械50进行作业的进度相关的信息。
信息请求信号例如在操作人员想要获得特定工程机械信息的时刻生成。操作人员是否想要获得特定工程机械信息,例如,可以基于操作人员的视线即基于操作人员是否在看显示在显示装置31上的工程机械50来判断。
显示控制部323使显示装置31进行基于上述特定工程机械信息的显示。显示控制部323既可以将特定工程机械信息的全部显示在显示装置31,也可以将特定工程机械信息的一部分显示在显示装置31。即使是在显示装置31显示特定工程机械信息的全部的情况下,也没有必要同时显示特定工程机械信息的全部。例如,也可以将特定工程机械信息分成多次进行显示。在将特定工程机械信息分成多次进行显示的情况下,例如,也可以以操作人员的操作为契机来切换所显示的信息。
操作人员信息获取装置33获取操作人员信息并将获取到的操作人员信息输入到服务器10。
操作人员信息是与远程操作工程机械50的操作人员相关的信息。操作人员信息包含用于确定操作人员的信息、用于确定操作人员与操作人员远程操作的工程机械50的对应关系的信息。与操作人员相关的信息例如是操作人员的姓名、ID、国籍、主装置30的通信地址等。
操作人员信息获取装置33包含摄像装置331。摄像装置331拍摄远程操作工程机械50的操作人员的脸部的图像。在本实施方式,操作人员信息包含由摄像装置331拍摄的操作人员的脸部的图像作为用于确定操作人员的信息。
从装置40是配置在工程机械50的操纵席,基于主装置30接受到的操作量直接操作设置在工程机械50的操纵席的操纵杆的从操作装置。从装置40可以说是操作人员的稻草人是用来操作工程机械50的设备。
工程机械50成为主装置30远程操作的对象。工程机械50例如是液压挖掘机、液压起重机等。
工程机械50包含工程机械信息获取装置51。工程机械信息获取装置51获取工程机械信息。
工程机械信息是与工程机械50相关的信息。工程机械信息包含与工程机械50的作业相关的信息。与工程机械50的作业相关的信息包含与在工程机械50进行作业的作业现场的工程机械50的位置相关的信息。与工程机械50的位置相关的信息例如通过利用GPS来获取。
而且,工程机械信息获取装置51将获取到的位置信息输入到服务器10。具体而言,工程机械50的通信装置经由网络NT1将工程机械信息发送到服务器10,从而工程机械信息被输入到服务器10。
服务器10、管理者终端20以及主装置30分别经由网络NT1可相互通信地连接。作为网络NT1可以采用由因特网以及移动电话通信网等构成的长距离通信网。
主装置30和从装置40经由通信路NT2可相互通信地连接。作为通信路NT2可以采用诸如特定省电(应为小功率)无线以及蓝牙(注册商标)等可使主装置30和从装置40在数十米至数百米左右的距离进行无线通信的通信路。但是,这仅是一个例子而已,主装置30和从装置40也可以经由网络NT1连接。在这种情况下,主装置30和从装置40可以进行长距离通信。或者,作为通信路NT2也可以采用有线。
管理者终端20由施工管理者持有的个人计算机等的计算机构成。管理者终端20具备显示装置21、控制装置22以及输入装置23。
显示装置21例如由液晶显示器构成。控制装置22例如由CPU等处理器构成,负责管理者终端20的整体控制。输入装置23例如是键盘以及鼠标,在施工管理者输入作业计划信息时被使用。
控制装置22包含作业计划信息生成部221、进度信息显示控制部222、现场信息显示控制部223。以下,对它们进行说明。
作业计划信息生成部221生成作业计划信息。作业计划信息是与多台工程机械50进行作业的计划相关的信息。作业计划信息包含作业内容和针对该作业内容的作业时间,所述作业内容是针对远程操作多台工程机械50的每个操作人员而设定的由该操作人员远程操作的工程机械50进行的作业内容。作业计划信息基于施工管理者使用输入装置23输入的内容而生成。另外,关于作业计划信息的详细情况将后述。
而且,作业计划信息生成部221将生成的作业计划信息输入到服务器10。具体而言,管理者终端20的通信部经由网络NT1将作业计划信息发送到服务器10,从而作业计划信息被输入到服务器10。
进度信息显示控制部222使显示设备21显示进度信息,该进度信息是向施工管理者提示的信息并且是与多台工程机械50进行作业的进度相关的信息。另外,关于进度信息将后述。
现场信息显示控制部223使显示装置21显示现场信息,该现场信息是向施工管理者提示的信息并且是表示多台工程机械50在作业现场的位置与分别远程操作多台工程机械50的操作人员之间的关系的信息。另外,关于现场信息的详细情况将后述。
图2A是表示在施工管理者输入作业计划信息时显示在管理者终端20的画面G1的一个例子的示意图。在画面G1显示有表示作业日程计划信息的表T1、施工图D1、表示现场地形信息的现场地形图像V1。图2B是表T1的放大图。
表T1设有“作业机”栏。在“作业机”栏输入所使用的工程机械50。
参照图2B。在表T1设有“工程机械信息”栏。在“工程机械信息”栏设有“机型”、“ATT”以及“远端ATT”栏。
在“机型”栏输入所使用的工程机械50的种类。
在“ATT”栏输入所使用的工程机械50具备的附属设备的种类。“ATT”例如表示诸如标准、长型、可分离、三折以及短臂等工程机械50所具备的附属设备的种类。例如,ATT为“标准”的附属设备由动臂以及吊臂构成。
在“远端ATT”栏输入远端附属设备的种类。“远端ATT”例如表示诸如铲斗、旋转抓斗、机械式抓斗、小块破碎机、大块破碎机等安装在附属设备的远端的远端附属设备的种类。
另外,“机型”、“ATT”以及“远端ATT”是与工程机械50的规格有关的多个参数的一个例子。
在表T1设有“作业内容”栏。在“作业内容”栏例如输入挖掘/装载以及平地修整等的工程机械50的作业内容。在表T1中输入有“挖掘/装载”、“平地修整”、“平地平整”、“坡面修整”以及“坡面平整”五个作业内容。
“挖掘/装载”是指挖掘土、地面以及岩石并将其装载到翻斗车的作业内容。“平地修整”是指修整通过“平地平整”而被平整的平地的作业内容。“平地平整”是指去除地面的凹凸从而形成平坦的地面的作业内容。“坡面修整”是指修整通过“坡面平整”而被平整的坡面的作业内容。“坡面平整”是指平整通过切土或填土而形成的人工的斜面即坡面的作业内容。另外,图2B列举的作业内容仅为一个例子而已,也可以包含其它的作业内容。
在表T1设有“作业预定”栏。在“作业预定”栏输入多台工程机械50中的每一台工程机械进行作业的时间表。如果用另一种说法就是在“作业预定”栏输入通过多台工程机械50中的每一台工程机械进行每个作业的所需时间。
在图2B所示的例子中,“作业预定”栏对于一台工程机械50将8点至18点为止的时间通过针对每一个小时而划分的多条纵线和针对每个作业内容而划分的多条横线划分为网格形状。施工管理者通过输入用于选择所期望的单元格的操作(例如:单击以及拖曳)来输入作业预定。
在图2B所示的例子中,工程机械50的“1号机”在与“挖掘/装载”相关的8点至11点的时间段、在与“平地修整”相关的13点至15点的时间段、在与“平地平整” 相关的16点至17点的时间段被输入有作业预定。
参照图2A。施工图D1例如是表示通过CAD等预先制作的作业现场的地形的数据。多台工程机械50按照施工图D1进行作业。
现场地形图像V1是表示多台工程机械50进行作业的作业现场的地形的图像。现场地形图像V1例如是安装在无人机上的摄像机或者设置在作业现场的摄像机从高空拍摄了作业现场的图像。或者,现场地形图像V1也可以是设置在工程机械50主体上的摄像机所拍摄的图像。现场地形图像V1既可以是以适当的间隔而更新的图像(静止图像)也可以是实时的图像(动态图像)。
施工管理者,如果对图2A所示画面的输入结束,就按下图略的发送按钮。由此,管理者终端20受理作业计划信息的输入并将其发送到服务器10。作业计划信息包含被输入到表T1的各栏的信息、施工图D1、现场地形图像V1。在此,被输入到表T1的各栏的信息例如是针对一台以上的工程机械中的每一台工程机械,将“工程机械信息”、“作业内容”与各作业内容的所需时间相互对应的信息。
再次参照图1进行说明。服务器10由具备CPU等的处理器、存储器以及通信功能的计算机构成。服务器10包含进度信息生成部11、现场信息生成部12、特定工程机械信息生成部13。
进度信息生成部11,基于从管理者终端20输入的作业计划信息和从作业信息获取部321输入的作业信息生成向施工管理者提示的进度信息,并将生成的进度信息输入到管理者终端20。
进度信息是与多台工程机械50进行作业的进度相关的信息。进度信息表示针对远程操作多台工程机械50的操作人员中的每个操作人员的作业的进度。进度信息例如用针对作业计划信息中包含的每个作业内容而设定的所需时间与作业信息中包含的实际的作业时间之间的关系来表示。
参照图3对进度信息进行说明。图3是表示在施工管理者管理多台工程机械50进行作业的进度时显示在管理者终端20上的画面G2的一个例子的示意图。在画面G2显示表示进度信息的表T2。
在表T2设有“工程机械”栏。在“工程机械”栏显示用于识别在作业现场正在作业的工程机械50的信息(在此为名称)。
在表T2设有“操作人员信息”栏。在“操作人员信息”栏设有“实时影像”、“姓名”、“等级”、“身体状况”、“远程控制地”、“国籍”以及“作业时间”栏。另外,在“操作人员信息”栏中显示的各种信息之中除了“实时影像”以外的信息被保存在被设置在服务器10的操作人员数据库(未图示)中。操作人员数据库将操作人员的姓名、等级、身体状况、远程控制地、国籍以及作业时间与操作人员远程操作的工程机械50的识别符(ID)相互对应地进行存储。作业时间是在当天(4月3日)从开始作业到目前为止的累计时间。例如,第一行的操作人员(神户建机太郎),由于在当天到目前为止的作业的累计时间为5小时30分,在“作业时间”栏显示“5小时30分”。
在“实时影像”栏显示拍摄了正在远程操作工程机械50的操作人员的脸部的图像。该图像由配置在主装置30的摄影装置331进行拍摄。
在“姓名”栏显示操作人员的姓名。
在“等级”栏显示表示操作人员的技能水平的等级。操作人员的技能水平例如基于操作人员在过去的作业业绩等来判断。
在“身体状况”栏显示正在远程操作工程机械50的操作人员的身体状况。该身体状况例如既可以显示基于由摄影装置331拍摄的操作人员的脸部的图像进行判断的结果,也可以显示基于操作人员的申报。
在“远程控制地”栏显示操作人员正在远程操作工程机械50的场所。
在“国籍”栏显示操作人员的国籍。
在“作业时间”栏显示操作人员远程操作工程机械50通过工程机械50进行作业的时间。
在表T2设有“作业内容”栏。在“作业内容”栏显示在表示作业日程计划信息的表T1输入的作业内容(“挖掘/装载”、“平地修整”、“平地平整”、“坡面修整”以及“坡面平整”的五个作业内容)。
在表T2设有“进度状况”栏。在“进度状况”栏,针对通过多台工程机械50中的每一台工程机械进行的作业的内容显示作业的进度状况。
在图3所示的例子中,操作人员“神户建机太郎”远程操作的工程机械50的“1号机”,对于“挖掘/装载”在8点-11点时间段、对于“平地修整”在13点-15点的时间段、对于“平地平整”在16点-17点的时间段输入有作业预定。
关于作业的进度状况的计算,例如可采用(1)根据实际的作业时间进行计算的方式、(2)根据实际的作业量进行计算的方式。
在(1)的情况下,通过针对每个作业内容将实际的作业时间除以作业预定时间(所需时间)从而计算出针对每个作业内容的进度率。在图3所示的例子中,“挖掘/装载”的实际的作业时间为4个小时,因为作业预定时间也为4个小时,所以进度率为100%。为此,8点-11点的时间段的四个单元格用表示作业完成的第一颜色来显示。而且,在“平地修整”,因为作业预定时间为3个小时而实际的作业时间为1小时30分,所以进度率为50%。为此,三个单元格的前半部分的1.5个单元格用第一颜色来显示,剩余的1.5个单元格用表示作业还未完成的第二颜色来显示。另外,实际的作业时间被包含在作业信息中,作业预定时间(所需时间)被包含在作业计划信息中。
在(2)的情况下,通过针对每个作业内容将实际的作业量除以作业预定量,计算出针对每个作业内容的进度率。例如,对于“挖掘/装载”,通过将工程机械50实际上装载的砂土的总重量除以根据作业计划预先决定的工程机械50应装载的砂土的总重量,计算出进度率。砂土的重量例如通过负载传感器进行检测。
再次参照图1进行说明。现场信息生成部12,基于从工程机械信息获取装置51输入的位置信息和从操作人员信息获取装置33输入的操作人员信息生成现场信息,并将生成的现场信息输入到管理者终端20。
现场信息是提示给施工管理者的信息,是表示多台工程机械50在作业现场的位置和分别远程操作多台工程机械50的操作人员之间的关系的信息。
参照图4对现场信息进行说明。图4是表示在施工管理者管理多台工程机械50进行作业的进度时显示在管理者终端20的画面G3的一个例子的示意图。在画面G3,作为现场信息,显示被输入到管理者终端20的现场地形图像以及存在于作业现场的工程机械50的信息J0。
再次参照图1进行说明。特定工程机械信息生成部13基于从信息请求部322输入的信息请求信号生成特定工程机械信息。而且,特定工程机械信息生成部13将所生成的特定工程机械信息输入到具有输入了信息请求信号的信息请求部322的主装置30。
参照图5至图7对工程机械信息进行说明。图5至图7分别表示在主装置30的显示装置31显示的工程机械信息的一个例子。在图5中,作为工程机械信息,显示与正在远程操作工程机械50的操作人员相关的信息J1。在图6中,作为工程机械信息,显示与工程机械50进行作业的进度相关的信息J2。在图7中,作为工程机械信息,显示与工程机械50的状态相关的信息J3。这种特定工程机械信息的切换例如通过让操作人员操作未图示的操作装置来执行。
参照图8对本发明的实施方式的施工管理系统所执行的各种处理进行说明。图8是表示本发明的实施方式涉及的施工管理系统所执行的各种处理的流程图。
(生成以及显示进度信息的处理)
在S101,管理者终端20受理由施工管理者输入的作业计划信息。在S102,管理者终端20将在S101受理的作业计划信息发送到服务器10。在S201,服务器10接收从管理者终端20发送来的作业计划信息。
在S301,主装置30获取作业信息。在S302,主装置30将在S301获取的作业信息发送到服务器10。
在S202,服务器10接收从主装置30发送来的作业信息。在S203,服务器10,基于在S201接收的作业计划信息中包含的作业日程计划信息和在S202接收的作业信息,生成进度信息。在S204,服务器10将在S203生成的进度信息发送到管理者终端20。
在S103,管理者终端20接收从服务器10发送来的进度信息。在S104,管理者终端20在显示装置21上显示在S103接收的进度信息(参照图3)。
(生成以及显示现场信息的处理)
在S401,工程机械50具有的工程机械信息获取装置51获取工程机械信息。在S402,工程机械50具有的工程机械信息获取装置51将在S401获取的工程机械信息发送到服务器10。
在S205,服务器10接收从工程机械50具有的工程机械信息获取装置51发送来的工程机械信息。在S206,服务器10,基于在S201接收的作业计划信息中包含的现场地形信息和在S205接收的工程机械信息,生成现场信息。在S207,服务器10将在S206生成的现场信息发送到管理者终端20。
在S105,管理者终端20接收从服务器10发送来的现场信息。在S106,管理者终端20将在S105接收的现场信息显示在显示装置21(参照图4)。
(生成以及显示特定工程机械信息的处理)
在S303,主装置30生成信息请求信号。在S304,主装置30将在S303生成的信息请求信号发送到服务器10。
在S208,服务器10接收从主装置30发送来的信息请求信号。在S209,服务器10生成特定工程机械信息。在S210,服务器10将在S209生成的特定工程机械信息发送到主装置30。
在S305,主装置30接收从服务器10发送来的特定工程机械信息。在S306,主装置30将在S305接收到的特定工程机械信息显示在显示装置31上。
在这样的施工管理系统,基于施工管理者输入的内容而制作的作业计划信息和表示在作业现场的作业的状况的作业信息被汇总到服务器10,利用这些信息生成的进度信息被提供给管理者终端20。其结果,施工管理者可以在管理者终端20掌握每个工程机械50的作业的进度。因此,在上述施工管理系统,可以容易地管理通过被远程操作的工程机械50进行作业的进度。
而且,在上述施工管理系统,包含工程机械50在作业现场的位置信息的工程机械信息和有关远程操作该工程机械50的操作人员的操作人员信息被汇总到服务器10,利用这些信息生成的现场信息被提供给管理者终端20。其结果,施工管理者可以在管理者终端20掌握工程机械50在作业现场的作业的状况。即,在上述施工管理系统,不仅可以掌握通过被远程操作的工程机械50进行作业的进度,还可以掌握工程机械50在作业现场的作业的状况。
而且,在上述施工管理系统,因为将与存在于操作人员远程操作的工程机械50周围的其它的工程机械50相关的信息(特定工程机械信息)显示在被设置在该操作人员远程操作工程机械50时所使用的主装置30的显示装置31上,所以远程操作工程机械50的操作人员可以获取与存在于该工程机械50周围的其它的工程机械50相关的信息。
而且,在上述施工管理系统,因为特定工程机械信息包含通过多台工程机械50之中与该特定工程机械信息对应的工程机械50进行作业的进度相关的信息,所以远程操作工程机械50的操作人员之间可以共享与作业的进度相关的信息。
以上,对本发明的实施方式进行了详细的说明,然而这些说明仅仅是一个例示而已,本发明不受上述的实施方式的任何限制。
在上述的实施方式,通过让操作人员操作被设置在主装置30的操纵杆,从而让被配置在工程机械50的驾驶室的从装置40操作工程机械50的操纵杆,然而例如也可以是不存在从装置40的方式,或者是工程机械50不具备操纵杆的方式。
在上述的实施方式,远程操作多台工程机械50,然而被远程操作的工程机械50也可以只是一台。
在上述的实施方式,将与存在于操作人员远程操作的工程机械50周围的其它的工程机械50相关的信息(特定工程机械信息)显示在被设置在该操作人员远程操作工程机械50时所使用的主装置30的显示装置31上,然而这种实施方式在本发明涉及的施工管理系统中不是必须的。
在上述的实施方式,包含工程机械50在作业现场的位置信息的工程机械信息和有关远程操作该工程机械50的操作人员的操作人员信息被汇总到服务器10,利用这些信息生成的现场信息被提供给管理者终端20,然而这种实施方式在本发明涉及的施工管理系统中不是必须的。
在本发明涉及的施工管理系统,也可以让分别远程操作多台工程机械的操作人员彼此之间进行通信。
实施方式的总结
本发明涉及的施工管理系统,是管理通过被远程操作的至少一台工程机械在作业现场进行作业的进度的施工管理系统,包括:管理者终端,用于让施工管理者管理通过所述至少一台工程机械进行作业的进度;服务器,与所述管理者终端可通信地连接;以及,至少一个作业信息获取装置,与所述至少一台工程机械相对应地而设置,获取与所述至少一台工程机械的作业的状况相关的作业信息,并将所述作业信息输入到所述服务器,其中, 所述管理者终端具备:作业计划信息生成部,基于所述施工管理者输入的内容生成与所述至少一台工程机械的作业计划有关的作业计划信息,并将所述作业计划信息输入到所述服务器,其中,所述作业计划信息包含针对每个远程操作所述至少一台工程机械的操作人员而设定的、各操作人员远程操作的工程机械的作业内容和对于对该作业内容的作业时间,所述服务器具备:进度信息生成部,基于所述作业信息和所述作业计划信息,针对所述至少一台工程机械中的每台工程机械生成表示操作人员的作业的进度的进度信息,并将所述进度信息输入到所述管理者终端,向所述施工管理者提示所述进度信息。
在上述的施工管理系统,基于施工管理者输入的内容而制作的作业计划信息和表示在作业现场的作业的状况的作业信息被汇总到服务器,利用这些信息生成的进度信息被提供给管理者终端。其结果,施工管理者可以在管理者终端掌握每个工程机械的作业的进度。因此,在上述施工管理系统,可以容易地管理通过被远程操作的工程机械进行作业的进度。
所述的施工管理系统,优选,还包括:至少一个工程机械信息获取装置,与所述至少一台工程机械相对应地而设置,获取包含与所述工程机械在作业现场的位置相关的信息的工程机械信息,并将所述工程机械信息输入到所述服务器;以及,至少一个操作人员信息获取装置,与所述至少一台工程机械相对应地而设置,获取与远程操作所述工程机械的操作人员相关的信息即操作人员信息,并将所述操作人员信息输入到所述服务器,所述服务器还具备:现场信息生成部,基于所述工程机械信息和所述操作人员信息,针对所述至少一台工程机械中的每台工程机械生成表示所述作业现场的位置和远程操作的操作人员之间的关系的现场信息,并将所述现场信息输入到所述管理者终端,向所述施工管理者提示所述现场信息。
在这样的施工管理系统,包含工程机械在作业现场的位置信息的工程机械信息和有关远程操作该工程机械的操作人员的操作人员信息被汇总到服务器,利用这些信息生成的现场信息被提供给管理者终端。其结果,施工管理者可以在管理者终端掌握工程机械在作业现场的作业的状况。即,在上述实施方式,不仅可以掌握通过被远程操作的工程机械进行作业的进度,还可以掌握工程机械在作业现场的作业的状况。
所述的施工管理系统,优选,还包括:至少一个远程操作装置,与所述至少一台工程机械相对应地而设置,用于远程操作所述至少一台工程机械并与所述服务器连接,其中,所述至少一个远程操作装置包含显示对应的工程机械的周围的图像的显示装置,所述至少一台工程机械是可以单独地远程操作的多台工程机械,所述至少一个远程操作装置是与所述多台工程机械分别对应而设置的多个远程操作装置,所述多个远程操作装置中的每一个远程操作装置还具备:信息请求部,生成用于向所述服务器请求获取特定工程机械信息的信息请求信号,所述特定工程机械信息是与对应的工程机械以外的工程机械之中被显示在所述显示装置的工程机械相关的信息,并将所述信息请求信号输入到所述服务器;以及,显示控制部,使所述显示装置进行基于所述特定工程机械信息的显示,所述服务器还具备:特定工程机械信息生成部,基于从所述信息请求部输入的所述信息请求信号生成所述特定工程机械信息,并将所述特定工程机械信息输入到具有输入了所述信息请求信号的所述信息请求部的所述远程操作装置。
在该实施方式,因为将与存在于操作人员远程操作的工程机械周围的其它的工程机械相关的信息显示在被设置在该操作人员远程操作工程机械时所使用的远程操作装置的显示装置上,所以远程操作工程机械的操作人员可以获取与存在于该工程机械周围的其它的工程机械相关的信息。
在所述的施工管理系统,优选,所述特定工程机械信息包含通过与所述多台工程机械之中的该特定工程机械信息所对应的工程机械进行作业的进度相关的信息。
在该实施方式,远程操作工程机械的操作人员之间可以共享与作业的进度相关的信息。
另外,本发明可以作为包含上述施工管理系统所具备的各个处理的施工管理方法来实现。而且,也可以通过让计算机执行上述施工管理方法的施工管理程序来实现。在这种情况下,施工管理程序可以存储在计算机可读取的非暂时性的存储介质中。
- 密封施工管理方法、密封施工管理装置、密封施工管理程序以及密封施工管理系统
- 密封施工管理方法、密封施工管理装置、密封施工管理程序以及密封施工管理系统