一种实时潜标通信浮体以及运动控制方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及水声通信技术领域,尤其涉及一种实时潜标通信浮体以及运动控制方法。
背景技术
实时通信潜标是深远海数据实时获取的重要手段之一,可通过卫星通信将观测数据实时传输到岸基,对岛礁附近海域及深远海环境观测具有重要意义。然而,实时潜标的通信浮体需长期位于海洋表面与卫星进行通信,造成其隐蔽性差,易受到过往船只破坏且因其距离陆地较远,维护成本很高。
发明内容
本发明的目的在于提供一种实时潜标通信浮体以及运动控制方法,以解决上述背景技术中提出的问题。
本发明是通过以下技术方案实现的:本发明第一方面提供了一种实时潜标通信浮体,包括浮体电子舱,所述浮体电子舱两侧设有角度可调节的翼型件,所述浮体电子舱底部设有凸起部,所述凸起部上对称设有推进器,所述浮体电子舱顶部设有固定支柱,所述固定支柱顶部设有太阳能电池板,所述固定支柱内部还设有控制电机,所述控制电机带动所述太阳能电池板实现同步收缩折叠,所述浮体电子舱内设有主控模块、电源模块、存储模块、卫星通信模块、GPS模块、传感器模块;
所述主控模块,用于实现通信浮体数据的接收处理及通信浮体的位置姿态调整;
所述电源模块,用于存储太阳能电池板收集的电能,并为通信浮体提供活动能源;
所述传感器模块,用于采集通信浮体的位置和姿态信息;
所述存储模块,用于存储传感器模块所采集的数据;
所述GPS模块,用于接收卫星定位信息;
所述卫星通信模块,用于将通信浮体的数据以及定位信息发送至岸基中心。
优选的,所述固定支柱顶部四边均设有传动杆,所述传动杆的末端均设有锥齿轮,所述锥齿轮两两相互啮合,所述传动杆上均套设太阳能电池板,其中一个传动杆与所述控制电机相连,所述控制电机与所述主控模块信号相连,所述电源模块为所述控制电机供电。
优选的,所述推进器包括保护外壳以及桨叶驱动杆、桨叶、驱动电机,所述桨叶驱动杆、桨叶、驱动电机均设置于保护外壳内部,所述驱动电机输出端与所述桨叶驱动杆相连,所述桨叶固定于所述桨叶驱动杆上,所述驱动电机与所述主控模块信号相连,所述电源模块为所述驱动电机供电。
优选的,所述电源模块包括锂电池组以及太阳能电池组,所述锂电池组为主控模块、存储模块、GPS模块和卫星通信模块供电;
所述太阳能电池组的输入端与所述太阳能电池板电性相连,所述太阳能电池组的输入端分别与驱动电机、控制电机、传感器模块电性相连。
优选的,所述浮体电子舱内部设有翼型件控制机构,所述翼型件控制机构与所述主控模块信号相连,用于根据所述主控模块信息,来调节翼型件角度。
优选的,所述传感器模块包括深度计、高度计、加速度计和陀螺仪中的一种或多种。
优选的,所述浮体电子舱上表面设有第一电极,所述浮体电子舱下表面设有第二电极。
本发明第二方面还提供了一种实时潜标通信浮体的运动控制方法,所述方法包括下列步骤:
所述通信浮体处于初始上浮状态时,通过GPS模块确定第一点位(λ
所述主控模块控制所述驱动电机逆时针旋转,使推进器给通信浮体向后的作用力,同时所述主控模块调节所述翼型件攻角,使得所述通信浮体下沉,所述通信浮体进入工作状态;
在一个工作周期后,所述主控模块调节所述通信浮体的运动方向为180°+θ
计算第一点位(λ
若l
优选的,所述方法还包括:若θ
与现有技术相比,本发明达到的有益效果如下:
本发明提供的一种实时潜标通信浮体及运动控制方法,在需要下潜时,所述主控模块根据待下潜深度计算推进器的运行参数以及翼型件的调节角度,当主控模块控制推进器逆时针旋转时,推进器给通信浮体一个向后的作用力,同时主控模块驱动改变翼型件攻角,使浮体下沉;
在需要上升时,所述主控模块根据待上升高度计算推进器的运行参数以及翼型件的调节角度,当主控模块控制推进器顺时针旋转时,推进器给通信浮体一个向前的推力,同时主控模块驱动增大翼型件攻角,使其迎流运动,在两侧翼型件作用下产生升力,补偿浮力向上运动,通过上述方式,在保障通信浮体隐蔽性和安全性的同时,实现观测数据的实时回传和通信浮体的电量补充,大幅度增加了实时潜标工作时间,保证其长期稳定运行,极大节约了潜标系统的维护成本,同时,动力驱动系统也可将其沉降至水面下某一特定深度,保障其隐蔽性和安全性,满足深远海水文观测和敏感海域观测需求。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明提供的一种实时潜标通信浮体的侧面示意图;
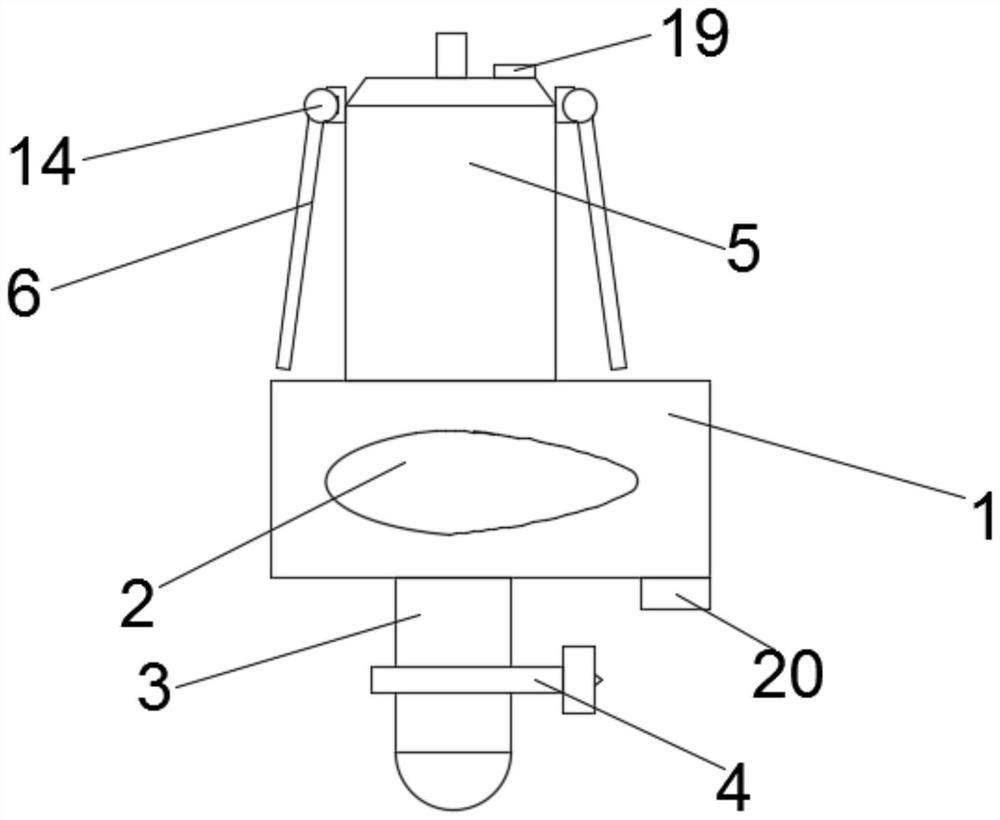
图2为本发明提供的一种实时潜标通信浮体的正面示意图;
图3为本发明提供的一种实时潜标通信浮体的俯视图;
图4为本发明提供的一种实时潜标通信浮体的固定支柱的顶部传动示意图;
图5为本发明提供的一种实时潜标通信浮体的信号模块示意图;
图6为本发明提供的一种实时潜标通信浮体的供电示意图。
图中,1浮体电子舱,2翼型件,3凸起部,4推进器,5固定支柱,6太阳能电池板,7主控模块,8电源模块,9存储模块,10卫星通信模块,11GPS模块,12传感器模块,13传动杆,14锥齿轮,15控制电机,16驱动电机,17锂电池组,18太阳能电池组,19第一电极,20第二电极。
具体实施方式
为了更好理解本发明技术内容,下面提供具体实施例,并结合附图对本发明做进一步的说明。
参见图1至图6,本发明第一方面提供了一种实时潜标通信浮体,包括浮体电子舱1,所述浮体电子舱1两侧设有角度可调节的翼型件2,所述浮体电子舱1底部设有凸起部3,所述凸起部3上对称设有推进器4,所述浮体电子舱1顶部设有固定支柱5,所述固定支柱5顶部设有太阳能电池板6,所述固定支柱5内部还设有控制电机15,所述控制电机15带动所述太阳能电池板6实现同步收缩折叠,所述浮体电子舱1内设有主控模块7、电源模块8、存储模块9、卫星通信模块10、GPS模块11、传感器模块12;
所述主控模块7,用于实现通信浮体数据的接收处理及通信浮体的位置姿态调整;
所述电源模块8,用于存储太阳能电池板6收集的电能,并为通信浮体提供活动能源;
所述传感器模块12,用于采集通信浮体的位置和姿态信息;
所述存储模块9,用于存储传感器模块12所采集的数据;
所述GPS模块11,用于接收卫星定位信息;
所述卫星通信模块10,用于将通信浮体的数据以及定位信息发送至岸基中心。
当通信浮体在水面上姿态稳定时,其推进器4工作状态为待机状态,在需要下潜时,所述主控模块7根据待下潜深度计算推进器4的运行参数以及翼型件2的调节角度,当主控模块7控制推进器4逆时针旋转时,推进器4给通信浮体一个向后的作用力,同时主控模块7驱动改变翼型件2攻角,使浮体下沉,通信浮体利用传感器模块12实时监测潜标的下沉深度,当其达到某个特定深度时,主控模块7控制电机15停止工作,推进器4停止转动,在水阻力的作用下,通信浮体悬浮在水中,此时再利用传感器模块12获取的深度值微调浮体位置,保证通信浮体下沉深度保持在5~10米范围内;
在需要上浮进行数据传输时,所述主控模块7根据待上升高度计算推进器4的运行参数以及翼型件2的调节角度,当主控模块7控制推进器4顺时针旋转时,推进器4给通信浮体一个向前的推力,同时主控模块7驱动增大翼型件2攻角,使其迎流运动,在两侧翼型件2作用下产生升力,补偿浮力向上运动;
在所述通信浮体在水面上姿态稳定且待传输数据时,所述主控模块7驱动控制电机15带动所述太阳能电池板6完成伸展,通过太阳能电池板6为通信浮体补充电能。
在所述通信浮体待下潜时,所述主控模块7驱动控制电机15带动所述太阳能电池板6完成同步折叠并收缩,有效防止海水冲刷及波浪冲击。
优选的,在本发明的一些实施方式中,所述主控模块7包括16位低功耗微处理器,以及相应的时钟电路、复位电路等,此处理器工作电压为1.8V3.6V,适用于低功耗设计的系统,其支持多种通信方式,包括UART、I
优选的,在本发明的一些实施方式中,存储模块9采用大容量的flash芯片,其价格较低,具有SPI通信功能,通信速率快且操作简单。通过计算,此芯片的容量可满足潜标系统以30min的采样间隔,连续工作5年以上的数据量,所以采用此芯片,既能满足当前应用需求也留有足够余量便于将来的扩展使用。
优选的,在本发明的一些实施方式中,卫星通信模块10采用国产化的北斗卫星通信模块10。
在本发明的一些实施方式中,所述GPS模块11采用小型GPS模块11,上电后其通过串口将定位信息发送至主控模块7,操作简单,定位准确。
具体的,所述固定支柱5顶部四边均设有传动杆13,所述传动杆13的末端均设有锥齿轮14,所述锥齿轮14两两相互啮合,所述传动杆13上均套设太阳能电池板6,其中一个传动杆13与所述控制电机15相连,所述控制电机15与所述主控模块7信号相连,所述电源模块8为所述控制电机15供电;
当需要使用太阳能电池板6为通信浮体充电时,所述主控模块7启动所述控制电机15,所述控制电机15带动其中一个传动杆13旋转,在传动杆13两端设置的锥齿轮14的啮合作用下,其他三根传动杆13实现同步旋转,进而实现所述太阳能电池板6的伸展
具体的,所述推进器4包括保护外壳以及桨叶驱动杆、桨叶、驱动电机16,所述桨叶驱动杆、桨叶、驱动电机16均设置于保护外壳内部,所述驱动电机16输出端与所述桨叶驱动杆相连,所述桨叶固定于所述桨叶驱动杆上,所述驱动电机16与所述主控模块7信号相连,所述电源模块8为所述驱动电机16供电。
所述推进器4数量至少为两个,安装于凸起部3两侧,其螺旋桨叶位于保护外壳的中心轴线处,通过设置保护外壳能有效阻挡水中漂浮物以及水中生物,如藤壶等,避免其直接撞击螺旋桨叶片。同时附着在保护壳上的生物在螺旋桨旋转产生的冲击水流作用下,冲离螺旋桨,达到保护螺旋桨的作用。
在使用时,驱动电机16带动桨叶驱动杆转动,桨叶驱动杆带动桨叶旋转从而为通信浮体提供动力。
优选的,在本发明的一些实施方式中,所述电源模块8包括锂电池组17以及太阳能电池组18,所述锂电池组17为主控模块7、存储模块9、GPS模块11和卫星通信模块10供电;其供电范围为7.2-14.4V。由于系统使用的主控芯片、存储芯片以及GPS模块11等模块工作电压(典型值)为3.3V,卫星通信模块10工作电压(典型值)为10.8V,所以在锂电池组17的输入口分为两路,一路供给卫星通信模块10,另一路采用DC-DC电路将电压降低至3.3V,然后再分路供给各模块。
所述太阳能电池组18的输入端与所述太阳能电池板6电性相连,所述太阳能电池组18的输出端分别与驱动电机16、控制电机15、传感器模块12电性相连,所述太阳能电池组18供电范围为7.2~24V,驱动电机16、控制电机15工作电压为12V,传感器的工作电压为7.2V,所以采用12V太阳能电池组18供电,电源入口分为两路,一路供给驱动电机16、控制电机15,另外一路通过电源管理电路降压之后,供给各传感器。由于整体系统需要低功耗工作,所以设计开关电路,通过主控模块7控制各个外设模块以及直流电机和传感器上下电,做到即用即开,实现低功耗工作目的。
优选的,所述浮体电子舱1内部设有翼型件控制机构,所述翼型件控制机构与所述主控模块7信号相连,用于根据所述主控模块7信息,来调节翼型件2角度。
需要说明的是,所述翼型件控制机构为本领域技术人员的常用结构,本发明实施例在此不做具体说明。
优选的,在本发明的一些实施方式中,所述传感器模块12包括深度计、高度计、加速度计和陀螺仪中的一种或多种。
深度计为直读式深度传感器,其精度高、响应快且功耗低,主要提供通信浮体的位置信息,为主控模块7控制电机15的逻辑提供判定信息;高度计主要测量通信浮体距离海底的距离,其作用之一是配合深度计确定通信浮体的位置,其二可利用其信息设置最大下潜深度,是防止深度计损坏或者失准以后,通信浮体被螺旋桨一直推进,通信浮体一直下沉,导致水压过大,损坏通信浮体;加速度计和陀螺仪可以测量通信浮体中的卫星仓的运动姿态,为惯性导航提供测量数据
优选的,在本发明的一些实施方式中,所述浮体电子舱1上表面设有第一电极19,所述浮体电子舱1下表面设有第二电极20,若两个电级同时进入海水中,则相应电路导通,主控模块7判断通信浮体为入水状态,若有电级露出海面,则相应电路开路,主控判断通信浮体为出水状态。
本发明第二方面还提供了一种实时潜标通信浮体的运动控制方法,所述方法包括下列步骤:
所述通信浮体处于初始上浮状态时,通过GPS模块11确定第一点位(λ
通信浮体的工作周期为1小时,即其下潜时长小于1小时,通信浮体系有缆绳,在海流作用下,其只能在一个有限范围内运动,在一个工作周期后,所述主控模块7根据加速度计和陀螺仪调节所述通信浮体的运动方向为180°+θ
计算第一点位(λ
若l
具体的,所述方法还包括:若θ
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。