用于驻车制动系统的控制方法、驻车制动系统、车辆
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及一种用于驻车制动系统的控制方法、驻车制动系统及车辆。
背景技术
专利文献CN110758397A公开了一种汽车坡道辅助系统的控制方法。该坡道辅助系统的控制方法由车辆中的ESP控制器进行控制,方法包括:踩下制动踏板,车辆速度下降直至车辆停在坡道上,ESP控制器测得车辆所处坡度大小和车辆上坡或下坡方向;ESP控制器基于车辆所处坡度大小和车辆上坡或下坡方向计算出车辆的最小驻坡力;松开制动踏板,ESP控制器内部的常开阀释放过剩的驻车力后关闭;挂入行车挡位,踩下油门踏板,发动机扭矩上升,常开阀释放制动压力,并与上升的发动机扭矩配合保持车辆稳定状态;当发动机扭矩可以使车辆起步时,常开阀完全打开。
专利文献CN110843755A公开了估测电动汽车制动压力的方法和设备。方法包括:采集实验车辆在各个不同工况下行驶时CAN总线上的数据、传感器上的数据和制动主缸的制动压力;将CAN总线上的数据和传感器上的数据作为输入数据,制动压力作为基准数据,基于贝叶斯规则反向训练人工神经网络模型,获得训练后的人工神经网络模型;将实际车辆在各个不同工况下行驶时的CAN总线上的数据以及传感器上的数据输入训练后的人工神经网络模型,估测实际车辆中制动主缸的制动压力。采用本公开,可以不借助传感器而有效估测电动汽车的制动压力。
专利文献CN110861622A公开了一种自动驻车方法。该方法包括:在所述自动驻车功能开启时,获取当前路况信息并通过所述当前路况信息提取坡度信息;根据所述坡度信息判断当前路况并生成当前路况信号;根据所述当前路况信号计算目标驻车扭矩;根据所述目标驻车扭矩输出对应的车轮制动压力,实现自动驻车。通过上述方式,为纯电动车辆提供了一种有效智能驻车方法,也为机械手刹纯电动车辆提供了有效智能驻车方法,不用人为进行繁琐操作,解决了现有技术机械手刹车辆及手动档车辆进行驻车时,出现驾驶操作不便或车辆后溜状况的技术问题。
专利文献CN111114549A公开了一种手动挡车辆坡起辅助装置、手动挡车辆和坡起辅助方法。所述坡起辅助装置包括ABS轮速传感器、坡起辅助开关、CAN总线、ASR电磁阀和ABS电磁阀,ASR电磁阀用于主动施加制动压力P1;ABS电磁阀在发动机输出扭矩T3大于或等于车辆受到的沿斜坡向下的阻力矩T阻时对制动压力P1进行调节使其梯度释放。本发明通过设置ABS电磁阀和ASR电磁阀,在坡起功能激活时ASR电磁阀对车辆施加制动压力,发动机输出扭矩增加到大于等于车辆受到的沿斜坡向下的阻力矩T阻时,ABS电磁阀对制动压力进行梯度调节,避免了发动机输出扭矩在小于车辆受到的沿斜坡向下的阻力矩T阻时的溜坡风险,使手动挡商用车的坡起实现自动控制。
上述的现有技术方案皆存在如下问题,尽管针对一般的斜坡情况作出了考虑,但是并没有提供针对不同情况(例如车道情况或气候情况)的标定空间或者说适配空间。因此,对于特别的情况,在斜坡上驾车时,驾驶员会感到拖拽或溜车,驾驶时很不舒服。
发明内容
本发明所要解决的技术问题是,针对上述现有技术的不足提出一种用于驻车制动系统的控制方法及一种驻车制动系统,其尤其是在坡道上驻车或起动时提高驾驶舒适性。
本发明提出一种用于车辆的驻车制动系统的控制方法,该控制方法包括以下步骤:
获取驾驶员的制动意图;
判断是否满足驻车条件;
获取车辆所处的道路的坡度信息;
在使用与坡度相关的驻车制动力矩标定值的情况下设定实际的驻车制动力矩。
在一般的液压驻车制动系统中,驾驶员通过踩下制动踏板使车辆停在斜坡上。此时松开制动踏板,液压驻车制动系统会在车轮上保压,使车辆保持停驻状态。在本发明的方法中,通过考虑标定值,可以使制动适配于具体的车辆使用条件,例如适配于当地的气候条件、路面条件等。因此,通过针对性地设定标定值,可以可靠地确保车辆在坡度上的可靠停驻并且同时不必使用过高的保压制动力。
根据一种优选的实施方式,驻车制动力矩标定值由存储在车辆中的数据组或查找表确定。
根据一种优选的实施方式,确定驾驶员期望制动力矩,将驾驶员期望制动力矩与驻车制动力矩标定值相比较,如果驾驶员期望制动力矩大于驻车制动力矩标定值,则将实际驻车制动力矩设定为驻车制动力矩标定值。
根据一种优选的实施方式,如果驾驶员期望制动力矩小于驻车制动力矩标定值,则将实际驻车制动力矩设定为驾驶员期望制动力矩并检查是否存在溜车现象;如果在此情况下存在溜车现象,提高制动力矩直到不再溜车。
根据一种优选的实施方式,该控制方法还包括以下步骤:
获取驾驶员的起动意愿;
判断加速踏板行程是否大于规定的阈值;
获取车辆所处的道路的坡度信息;
根据坡度信息以及实时驱动力矩来设定实时制动力矩。
根据该方法,对于驻车状态的车辆,在希望再次起动时驾驶员通过踩下加速踏板使车轮上保持的制动压力降至零。通过考虑坡度信息和实时驱动力矩,能够使车辆稳定地保持力矩平衡的状态,从而实现无急动并且不溜车的起动过程。从而提高驾驶舒适性。
根据一种优选的实施方式,根据以下公式确定实时制动力矩y:
其中,y是实时制动力矩;
T
x是驱动力矩;
T
根据一种优选的实施方式,根据以下公式确定实时制动力矩y:
其中,y是实时制动力矩;
T
x是驱动力矩;
T
T
Factor是一标定因数。
根据一种优选的实施方式,起动力矩阈值T
根据一种优选的实施方式,与坡度相关的力矩值T
本发明还提出一种用于车辆的驻车制动系统,该控制系统配置成执行根据本发明所述的方法。另外,本发明还涉及包含所述驻车制动系统的车辆。
附图说明
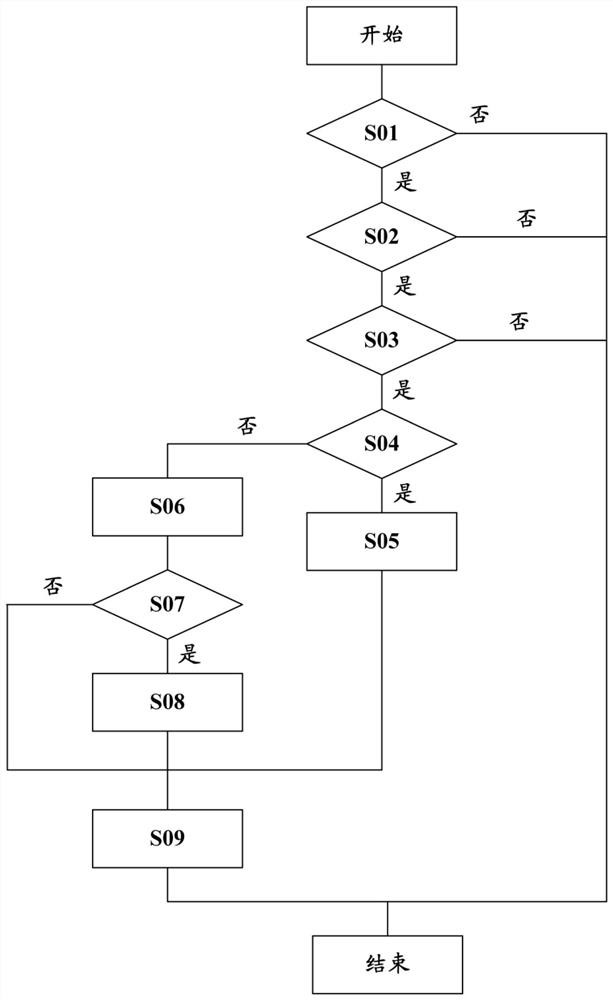
图1是根据本发明的方法在停车阶段的控制流程图。
图2是根据本发明的方法在起动阶段的控制流程图。
图3是根据一实施方式的在起动阶段中实时制动力矩与实时驱动力矩的关系图。
图4是根据另一实施方式的在起动阶段中实时制动力矩与实时驱动力矩的关系图。
具体实施方式
下面将参照附图并通过具体的实施例来描述根据本发明的控制方法、驻车制动系统及车辆。然而,示例性实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明全面和完整,并将示例性实施例的构思全面地传达给本领域的技术人员。
图1示出了根据本发明的方法在停车阶段的控制流程图。首先,在步骤S01中获取驾驶员的制动意图。例如,由制动踏板传感器信号来确定制动意图。在获取驾驶员制动意图的情况下,转到步骤S02,否则结束该方法。在步骤S02中判断是否满足驻车条件。
例如,根据制动踏板行程与当前车速判定,车辆是否应当被停驻。或者也可以根据当前环境信息或导航判定,驾驶员是否意图停车。例如,如果当前车道中前方车辆处于停驻状态或者即将到达交通信号灯,或者到达导航目的地,则可以判定驾驶员意图停车。
如果在步骤S02中判定满足驻车条件,则转到步骤S03。在步骤S03中判断车辆是否处于斜坡上,如果车辆处于斜坡上,则转到步骤S04并且将坡度值用于下面的方法步骤,否则结束方法并转到平路驻车控制方法。坡度的判断以及坡度值的获取可以由坡度传感器确定,或者可以利用现有的纵向加速度传感器确定车辆所处的道路的坡度。当然,也可以利用数字地图信息或者利用车联网由从其它车辆或服务器接收到的环境信息来确定坡度值。
在步骤S04中,将驾驶员期望制动力矩与一驻车制动力矩标定值相比较。在此,驾驶员期望制动力矩可以由制动踏板行程得出。而驻车制动力矩标定值则可以由存储在机动车中的数据组或查找表确定。利用该数据组或查找表,可以通过坡度值确定相应的驻车制动力矩标定值。
如果驾驶员期望制动力矩大于驻车制动力矩标定值,则转到步骤S05,否则转到步骤S06。在步骤S05中,将实际驻车制动力矩设定为驻车制动力矩标定值。然后,转到步骤S09并进入驻车制动保压状态。在步骤S06中,将实际驻车制动力矩设定为驾驶员期望制动力矩并转到步骤S07。在步骤S07中,判断当前的驻车力矩下是否出现溜车现象。例如可以由车轮转速传感器来检测溜车现象。
如果在步骤S07中确定不存在溜车现象,则保持该制动力矩并且转到步骤S09并进入驻车制动保压状态。而如果在步骤S07中确定存在溜车现象,则转到步骤S08。在步骤S08中,提高制动力矩直到不再溜车。然后,转到步骤S09并进入驻车制动保压状态。
在此,由于标定值本身可以根据具体的车辆使用条件来确定,例如适应于当地的气候条件、路面条件等,因此,通过针对性地设定标定值,可以可靠地确保车辆在坡度上的可靠停驻并且同时不必使用过高的保压制动力。
图2示出了根据本发明的方法在起动阶段的控制流程图。如果驾驶员通过踩下加速踏板来表达起动意愿,则车辆进行起动阶段。首先,在步骤S11中判定加速踏板行程是否大于预先规定的阈值。如果加速踏板行程大于预先规定的阈值,则转到步骤S12,否则结束该程序。在步骤S12中,判断车辆是否处于斜坡上,如果车辆处于斜坡上,则转到步骤S13并且将坡度值用于下面的方法步骤,否则结束方法并转到平路起动控制方法。
该坡度值可以使用坡度传感器获取,或者也可以使用在驻车时保存的坡度数据。当然,也可以利用数字地图信息或者利用车联网由从其它车辆或服务器接收到的环境信息来确定坡度值。
在步骤S13中,根据当前存在的驱动力力矩来使驻车制动器逐步卸压。例如,根据以下公式确定实时制动力矩y:
其中,y是实时制动力矩;
T
x是驱动力矩;
T
在此,T
如图3所示,随着驱动力矩x的增大,实时制动力矩y从车辆起动前存在于车轮上的实际驻车制动力矩T
随着实时制动力矩的降低,车辆在驱动力矩的作用下起动并完成起动过程,该程序结束。
根据另一种优选的实施方式,根据以下公式确定实时制动力矩y:
其中,y是实时制动力矩;
T
x是驱动力矩;
T
T
Factor是一标定因数。
T
T
Factor为一标定因数,其可以根据实际的情况通过标定确定。其取值可以是0-1的值,也可以是其它的值。由于Factor和起动力矩阈值T
本领域技术人员在考虑以上实施方式公开的内容后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由所附的权利要求指出。
- 用于驻车制动系统的控制方法、驻车制动系统、车辆
- 用于驻车制动系统的释放装置、驻车制动系统以及车辆