基于云端控制的无人驾驶航标船系统及其航标船移动方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及航标应用技术领域,具体来说是一种基于云端控制的无人驾驶航标船系统及其航标船移动方法。
背景技术
航标,是水位期航道边界的标记物,常分为水上浮标、岸标。航标帮助船舶安全通过桥区和浅滩、暗礁等碍航建筑物丛生的危险航段,是船舶驾驶员的“第三只眼睛”,在内河水运和近海船舶航行中发挥了重要作用。
在内河航道中,航标通常是以航标船的形式出现。航标船由水上的船体部分和水下的锚碇及连接船体、锚碇之间锚链组成,传统航标的特点是位置固定和无动力系统。然而航标船的位置并不是一直固定不变,当内河上每一次涨水和退水都会改变航道边界,作为航道边界标记物的航标船则需要移动到新的位置来标记新的航道边界。目前移动航标的方式为:航道部门维护人员需要乘坐维护机动船到达航标原位置,将航标船绑缚在机动船上,收起锚碇的锚链,将其整体移动到新的指定位置。维护机动船在洪水期长距离长时驾驶和到达现场后的航标船移动工作都使维护人员的安全得不到很好的保障,导致了该维护过程费时费力费财且不安全。
中国专利号CN208559699U、专利名称为一种具备自动归位和避撞功能的航标公开了一种可通过升降感应组件来控制收紧、放长锚链使得对航标位置进行调节,并通过泵喷水来实现航标的避撞功能。然而在实际应用中通过对锚链长短的控制来实现对航标的位移只能针对航标处于锚碇下游位置变化情形,当航标需要侧移或者移动到锚碇上游位置时,则无法实现。
鉴于此,完全有必要研发一种可以进行云端控制的无人驾驶航标船系统及其航标船移动方法来解决现有对航标船移动工作中费时费力费财且不安全的问题。
发明内容
针对上述现有技术中的不足之处,本发明提出基于云端控制的无人驾驶航标船系统及其航标船移动方法,通过云端对航标船的自主移动控制,来解决传统对航标船移动工作中费时费力费财且不安全的问题。
为了实现上述目的,本发明的技术方案:基于云端控制的无人驾驶航标船系统,其包括有
云端计算机群,通过无线网络接收并处理航标船所采集的数据信号后,向所述航标船发送指令;
航标船,包括有航标船处理模块、GPS/北斗定位模块、无线网络收发模块、发动机控制模块、方向控制模块、采集模块及动力源,其中,
所述采集模块通过传感器采集所述航标船工作环境的水位深度、水位流速参数;
所述GPS/北斗定位模块实时定位当前所述航标船的位置;
所述航标船处理模块通过将所述采集模块采集的参数信息、所述GPS/北斗定位模块采集的位置信息形成数据信号经所述无线网络收发模块发送给所述云端计算机群,并接收所述云端计算机群发出的移动指令后,控制所述发动机控制模块、所述方向控制模块对所述航标船进行移动;
所述发动机控制模块接受所述航标船处理模块的指令,包括启闭控制模块、功率控制模块、速度控制模块,所述启闭控制模块分别用于控制第一发动机、第二发动机的启闭;所述功率控制模块用于控制第二发动机的功率,通过卷收机对所述航标船的锚链进行卷放;所述速度控制模块用于控制第一发动机的速度,控制对所述航标船的驱动叶轮的驱动;
所述方向控制模块接受所述航标船处理模块的指令,用于控制所述驱动叶轮对所述航标船的驱动方向。
进一步的,所述航标船还包括有发电控制模块,用于接受所述航标船处理模块的指令,对所述航标船上的发电装置进行启停控制,所述发电装置包括太阳能发电或/和水能发电,所产生的电能储存于所述航标船的蓄电设备内。
进一步的,所述动力源包括为所述第一发动机、第二发动机提供能源的储能设备,该储能设备包括所述蓄电设备或/和为所述第一发动机、第二发动机提供介质能源的燃油。
进一步的,所述采集模块还通过传感器采集有所述航标船工作环境的航标灯供电、蓄电设备蓄电量、燃油量、环境温度参数,所述航标船处理模块将该航标灯供电、蓄电设备蓄电量、燃油量、环境温度参数形成数据信号经所述无线网络收发模块发送给所述云端计算机群。
本发明还公开了基于云端控制的无人驾驶航标船系统的航标船移动方法,其包括步骤有
S1、云端计算机群处理航标船处理模块所发送的当前航标船水位、所处位置流速信号后,向航标船处理模块发送移动指令;
S2、启闭控制模块经航标船处理模块接受云端计算机群发出的开启指令,开启第二发动机,功率控制模块接受云端计算机群发出的功率指令,控制第二发动机的功率,通过卷收机对锚链的收卷作业;
S3、启闭控制模块经航标船处理模块接受云端计算机群发出的开启指令,开启第一发动机,速度控制模块接受云端计算机群发出的速度指令,第一发动机驱动驱动叶轮,进而控制航标船移动;
S4、方向控制模块经航标船处理模块接受云端计算机群发出的转向指令,控制驱动叶轮变向,实现对航标船的转向;
S5、航标船移动到位置后,云端计算机群根据GPS/北斗定位模块发送的数据信号,向航标船处理模块发出修正指令,航标船处理模块对航标船位置进行修正调整;
S6、航标船移动到设定位置后,收卷模块经航标船处理模块接受云端计算机群发出的卷放指令,第二发动机对航标船的锚链进行卷放作业,最终实现航标船在新设定位置的定位。
进一步的,所述步骤S2包括步骤有
S2-1、锚碇拖起阶段,云端计算机群通过航标船处理模块向功率控制模块发出高功率运转指令,第二发动机通过锚链将所述航标船的锚碇从水底瞬间拉起;
S2-2、水中卷放阶段,云端计算机群通过航标船处理模块向功率控制模块发出低功率运转指令,第二发动机通过卷收机对锚链进行匀速收卷,进而将锚碇收起。
本发明的有益效果:通过云端对航标船的自主移动控制,解决了传统对航标船移动工作中费时费力费财且不安全的问题。
附图说明
图1是本发明中对航标船的整体控制架构示意图;
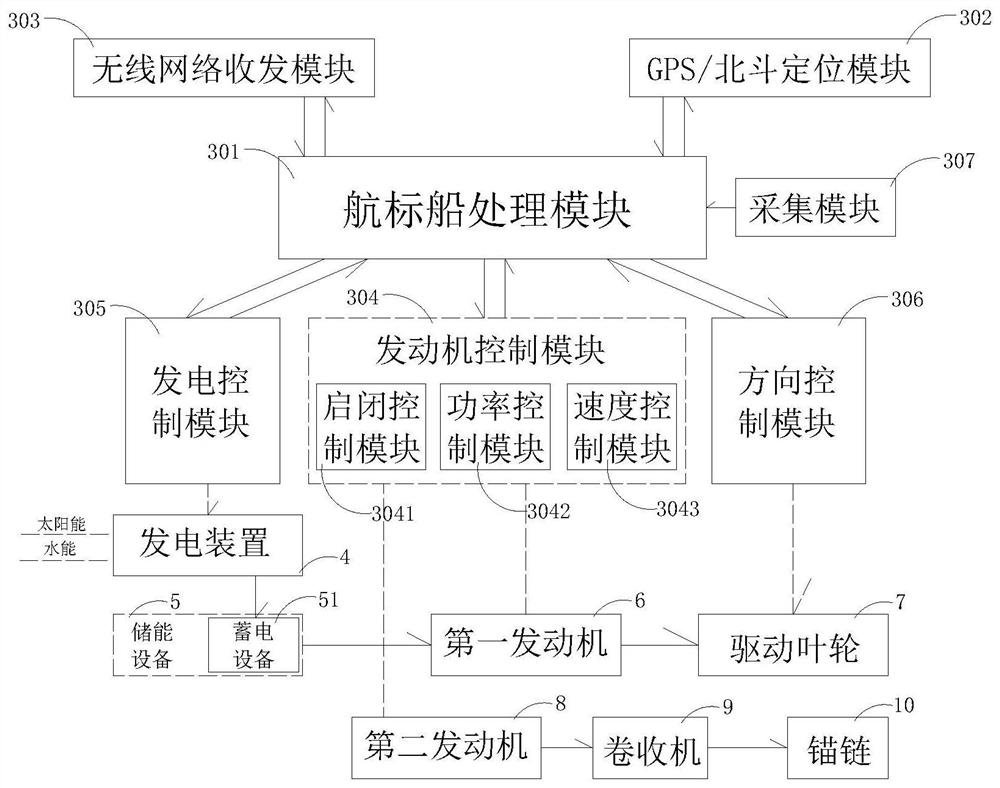
图2是本发明中航标船的原理示意框图;
图3是本发明对航标船的移动流程图。
具体实施方式
下面结合具体实施例及附图来进一步详细说明本发明。
一种如图1、图2所示基于云端控制的无人驾驶航标船系统,其包括有
云端计算机群1,通过无线网络接收并处理航标船3所采集的数据信号后,向航标船3发送指令;
航标船3,包括有航标船处理模块301、GPS/北斗定位模块302、无线网络收发模块303、发动机控制模块304、发电控制模块5、方向控制模块306、采集模块307及动力源,其中,
采集模块307通过各类传感器采集航标船3工作环境的水位深度、水位流速、工作环境的航标灯供电、蓄电设备蓄电量、燃油量、环境温度等参数,再由航标船处理模块301将水位深度、水位流速、航标灯供电、蓄电设备蓄电量、燃油量、环境温度等参数形成数据信号经无线网络收发模块303发送给云端计算机群1;
GPS/北斗定位模块302实时定位当前航标船3的位置,通过航标船处理模块301传送至云端计算机群1存储并处理;
航标船处理模块301通过将采集模块307采集的参数信息、GPS/北斗定位模块302采集的位置信息形成数据信号经无线网络收发模块303发送给云端计算机群1,并接收云端计算机群1发出的移动指令后,控制发动机控制模块304、方向控制模块306对航标船3进行移动;
发动机控制模块304接受航标船处理模块301的指令,包括启闭控制模块3041、功率控制模块3042、速度控制模块3043,启闭控制模块3041分别用于控制第一发动机6、第二发动机8的启闭;功率控制模块3042用于控制第二发动机8的功率,通过卷收机9对航标船3的锚链进行卷放;速度控制模块3043用于控制第一发动机6的速度,控制对航标船3的驱动叶轮7的驱动;
方向控制模块306接受航标船处理模块301的指令,用于控制驱动叶轮7对航标船3的驱动方向;
发电控制模块305,用于接受航标船处理模块301的指令,对航标船3上的发电装置4进行启停控制,发电装置4包括太阳能发电或/和水能发电,所产生的电能储存于航标船3的蓄电设备51内。
本发明中,云端计算机群1设置于航道维护部门中控中心,用于监控和维护整个航道的航标船。云端计算机群1与航标船3之间通过4G或5G网络通信,形成一个封闭的局域网交互控制系统,运用基站2进行信息中转。其中,航标船处理模块301将采集中的各类信号发送至云端计算机群1进行储存并处理,根据航道部门具体要求,再下发指令至航标船处理模块1中进行具体执行。图2中,航标船处理模块301采用市面各类控制器,比如西门子SIMATICS7-1500用于与云端计算机群1进行信息交互,并将相应指令分发至各类二级模块。至于4G或5G通讯原理已属于现有技术,再此不进行原理赘述。
航标船3的船舱内设置智能安全盒子,用于设置各类控制模块,再通过控制线路连接至具体执行端或采集端,比如第一发动机6、第二发动机8、发电装置4、驱动叶轮7的方向控制端、设置于航标船上或船边缘、船底的各类传感器,比如温度传感器、水流传感器、声纳传感器、电流传感器等。
航标船3上运用的动力源主要是为第一发动机6、第二发动机8提供能源的储能设备5,该储能设备5包括蓄电设备51或/和为第一发动机6、第二发动机8提供介质能源的燃油,具体地,储能设备5包括有定期设置在航标船3上的蓄电池或电瓶、由发电装置4通过太阳能、水能转化为电能后储存的蓄电设备51、第一发动机6和第二发动机8如采用燃油发动机所使用的柴油等能源。
对于发电装置4,如采用太阳能发电,在航标船3上设置太阳能板,通过接收光能进行发电;比如采用水能发电,在航标船3底部四周设置发电叶片共计64片,通过水能转化成电能,最终转化的电能通过蓄电设备51进行储存备用。至于太阳能发电、水能发电的原理和结构图已属于现有技术,本发明旨在对其应用,因此本说明书不进行进一步叙述。另外对于发电装置4来说,除了太阳能发电、水能发电外,在某些特殊场合也可以采用潮汐能、风能等绿色、环保、清洁化能源发电。
对于航标船3中的第一发动机6、第二发动机8、卷收机9的设置位置,可根据具体航标船的驱动叶轮7的位置、锚链10端头位置进行就近设定,卷收机9的卷收系统应预留一段距离的锚链,用于针对水位高涨后需加长锚链,以使得航标船3静置状态下锚碇可沉入水底。
本系统针对航标船移动的步骤如下:
S1、云端计算机群处理航标船处理模块所发送的当前航标船水位、所处位置流速信号后,根据航道部门的要求,向航标船处理模块发送移动指令;
S2、启闭控制模块经航标船处理模块接受云端计算机群发出的开启指令,开启第二发动机8,功率控制模块接受云端计算机群发出的功率指令,控制第二发动机8的功率,通过卷收机9对锚链10的收卷作业;
S3、启闭控制模块经航标船处理模块接受云端计算机群发出的开启指令,开启第一发动机6,速度控制模块接受云端计算机群发出的速度指令,第一发动机6驱动驱动叶轮7,进而控制航标船移动;
S4、方向控制模块经航标船处理模块接受云端计算机群发出的转向指令,控制驱动叶轮7变向,实现对航标船的转向;
S5、航标船移动到位置后,云端计算机群根据GPS/北斗定位模块实时发送的数据信号,向航标船处理模块发出修正指令,航标船处理模块对航标船位置进行修正调整;
S6、航标船移动到设定位置后,收卷模块经航标船处理模块接受云端计算机群发出的卷放指令,第二发动机对航标船的锚链进行卷放作业,最终实现航标船在新设定位置的定位。
在针对卷收机9对锚链10进行收卷过程中,因锚碇在水底与水中所产生的势能不一致,因此通过功率控制模块3042将锚链10收起阶段分为两步:
S2-1、锚碇拖起阶段,云端计算机群通过航标船处理模块向功率控制模块发出高功率运转指令,第二发动机通过锚链将所述航标船的锚碇从水底瞬间拉起;
S2-2、水中卷放阶段,云端计算机群通过航标船处理模块向功率控制模块发出低功率运转指令,第二发动机通过卷收机对锚链进行匀速收卷,进而将锚碇收起。
以上对本发明实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本发明实施例的原理;同时,对于本领域的一般技术人员,依据本发明实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。