一种水上航标智能升降装置以及升降方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及航标灯技术领域,特别涉及一种水上航标智能升降装置以及升降方法。
背景技术
航标灯是安装在某些航标上的一类交通灯,在夜间发出规定的灯光颜色和闪光频率(频率可以为0),达到规定的照射角度和能见距,对夜行的船舶进行指引。其中航标灯主要包括固定安装在江河岸边的(也称航标楼)以及漂浮在水面上的,其通过锚石和钢连接在河床或江床,从而保证漂浮在水面上的浮鼓部分的位置的稳定,同时整个航标灯是通过太阳能进行充电,蓄电池进行存储电能,从而能够实现电能的自给自足,实用性强。
其中,航标灯中具有电机和绞盘,用于实现对钢缆的收放,从而适用于不同的水深;由于钢缆的绳长不变,如果水太浅则航标流到很远,如果水太深,则航标有可能被拉入到水中,为了防止上述问题则需要工人经常巡视,调节钢缆的长度,从而防止上面的问题发生;但是需要人工经常巡视,人工劳动强度大。
发明内容
本发明的目的是提供一种水上航标智能升降装置以及升降方法,旨在解决人工劳动强度大的问题。
本发明的上述技术目的是通过以下技术方案得以实现的:一种水上航标智能升降装置,包括本体、活动穿过所述本体的连接缆、转动设置于所述本体内的绞盘以及用于驱动所述绞盘转动的第一驱动电机,所述连接缆的顶部缠绕于所述绞盘;
超声波探测仪,所述超声波探测仪设置于所述本体的底部,用于探测水深;
控制器,所述第一驱动电机以及所述超声波探测仪分别与所述控制器电连接。
本发明的进一步设置为:所述本体内相对设置有两对支撑座,每对所述支撑座之间均水平设置有驱动丝杆,所述驱动丝杆与所述支撑座转动连接,且两根所述驱动丝杆相互平行,所述驱动丝杆外接有用于驱动所述驱动丝杆转动的第二驱动电机;还包括有两块相对设置的支撑板,所述支撑板均与两根所述驱动丝杆螺纹连接,两块所述支撑板之间转动设置有支撑杆,所述绞盘连接于所述支撑杆的中部,所述第一驱动电机连接于所述支撑杆的端部。
本发明的进一步设置为:所述绞盘的外壁上开设有螺旋形的缠绕槽,所述缠绕槽的两端分别位于所述绞盘的两端。
本发明的进一步设置为:所述绞盘两端的外壁上均设置有限位部。
本发明的进一步设置为:两块所述支撑板之间设置有两根钢缆限位杆,两根所述钢缆限位杆位于所述绞盘的两侧。
本发明的进一步设置为:相对的两块所述支撑座之间设置有导向杆,所述导向杆穿过所述支撑板并与所述支撑板活动贴合。
本发明的进一步设置为:所述本体上设置有定位芯片,所述定位芯片与所述控制器电连接。
本发明还提供了一种基于如上任一项所述的一种水上航标智能升降装置的升降方法,包括以下步骤:
S1,超声波探测仪测试当前水深,得数据一,并将数据一传送至控制器;
S2,第一驱动电机将运动数据发送至控制器,控制器根据第一驱动电机的运动数据推算出水下连接缆的长度数据二;
S3,控制器对比数据一和数据二,发出信号控制第一驱动电机转动,带动绞盘释放或卷绕连接缆。
本发明的进一步设置为:所述控制器内设有阈值一,当数据一与数据二之间的差异大于阈值一时,第一驱动电机转动,当数据一与数据二之间的差异小于阈值一时,第一驱动电机待机。
本发明的进一步设置为:所述本体上设置有定位芯片,所述控制器内设有阈值二,当定位芯片的位移大于阈值二时,控制器控制第一驱动电机转动,当定位芯片的位移小于阈值二时,第一驱动电机待机。
本发明的有益效果是:航标灯在使用时,首先超声波探测仪持续测试当前水深,得数据一,并将数据一传送至控制器;其次,第一驱动电机将运动数据发送至控制器,控制器根据第一驱动电机的运动数据推算出水下连接缆的长度数据二;控制器对比数据一和数据二,发出信号控制第一驱动电机转动,带动绞盘释放或卷绕连接缆,如此整个过程都是自动进行的,无需人为进行参与,降低了人工成本;同时由于该过程是持续自动进行的,防止了人工判断失误,或者判断控制不及时而导致航标灯漂流过远,甚至与被拉入水底,使用效果较好。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
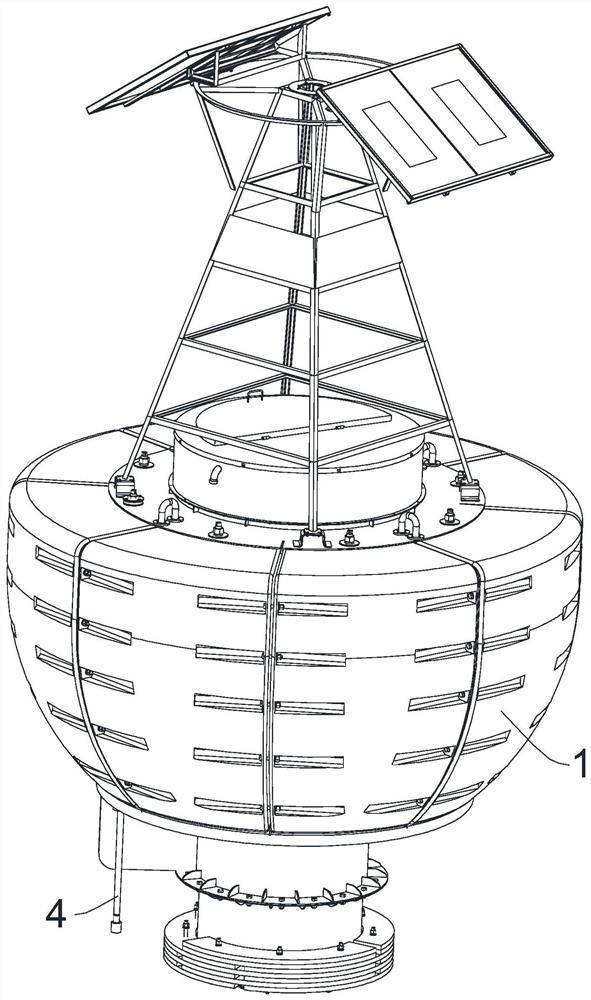
图1是本发明一种水上航标智能升降装置一实施例的结构示意图;
图2是本发明一种水上航标智能升降装置一实施例的剖视图一;
图3是图2中A部分的放大图;
图4是本发明一种水上航标智能升降装置一实施例的剖视图二;
图5是图4中B部分的放大图。
图中,1、本体;2、绞盘;3、第一驱动电机;4、超声波探测仪;5、支撑座;6、驱动丝杆;7、第二驱动电机;8、支撑板;9、支撑杆;10、缠绕槽;11、限位部;12、钢缆限位杆;13、导向杆。
具体实施方式
下面将结合附图以及具体实施例对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种水上航标智能升降装置,如图1至图5所示,包括本体1、活动穿过所述本体1的连接缆(如图2中,连接缆闯过了本体1的中部,但是本体1中部是密封状态,无法进水)、转动设置于所述本体1内的绞盘2以及用于驱动所述绞盘2转动的第一驱动电机3,所述连接缆的顶部缠绕于所述绞盘2;
超声波探测仪4,所述超声波探测仪4设置于所述本体1的底部,用于探测水深;
控制器,所述第一驱动电机3以及所述超声波探测仪4分别与所述控制器电连接。
所述本体1内相对设置有两对支撑座5,每对所述支撑座5之间均水平设置有驱动丝杆6,所述驱动丝杆6与所述支撑座5转动连接,且两根所述驱动丝杆6相互平行,所述驱动丝杆6外接有用于驱动所述驱动丝杆6转动的第二驱动电机7;还包括有两块相对设置的支撑板8,所述支撑板8均与两根所述驱动丝杆6螺纹连接,两块所述支撑板8之间转动设置有支撑杆9,所述绞盘2连接于所述支撑杆9的中部,所述第一驱动电机3连接于所述支撑杆9的端部。所述绞盘2的外壁上开设有螺旋形的缠绕槽10,所述缠绕槽10的两端分别位于所述绞盘2的两端。所述绞盘2两端的外壁上均设置有限位部11。
两块所述支撑板8之间设置有两根钢缆限位杆12,两根所述钢缆限位杆12位于所述绞盘2的两侧。相对的两块所述支撑座5之间设置有导向杆13,所述导向杆13穿过所述支撑板并与所述支撑板活动贴合。所述本体1上设置有定位芯片,所述定位芯片与所述控制器电连接。
本发明还提供了一种基于如上任一项所述的一种水上航标智能升降装置的升降方法,包括以下步骤:
S1,超声波探测仪4测试当前水深,得数据一,并将数据一传送至控制器;
S2,第一驱动电机3将运动数据发送至控制器,控制器根据第一驱动电机3的运动数据推算出水下连接缆的长度数据二;
S3,控制器对比数据一和数据二,发出信号控制第一驱动电机3转动,带动绞盘2释放或卷绕连接缆。
所述控制器内设有阈值一,当数据一与数据二之间的差异大于阈值一时,第一驱动电机3转动,当数据一与数据二之间的差异小于阈值一时,第一驱动电机3待机。
所述本体1上设置有定位芯片,所述控制器内设有阈值二,当定位芯片的位移大于阈值二时,控制器控制第一驱动电机3转动,当定位芯片的位移小于阈值二时,第一驱动电机3待机。
本发明提供的一种水上航标智能升降装置以及升降方法,航标灯在使用时,首先超声波探测仪4持续测试当前水深,得数据一,并将数据一传送至控制器;其次,第一驱动电机3将运动数据发送至控制器,控制器根据第一驱动电机3的运动数据推算出水下连接缆的长度数据二;控制器对比数据一和数据二,发出信号控制第一驱动电机3转动,带动绞盘2释放或卷绕连接缆,如此整个过程都是自动进行的,无需人为进行参与,降低了人工成本;同时由于该过程是持续自动进行的,防止了人工判断失误,或者判断控制不及时而导致航标灯漂流过远,甚至与被拉入水底,使用效果较好。
其中,由于缠绕槽10是持续进行的,因此连接缆能够均匀的缠绕在绞盘2上,当绞盘2在第一驱动电机3(减速电机)带动而转动的时候,同时第二驱动电机7(减速电机)也带动了驱动丝杆6进行转动,驱动丝杆6带动绞盘2等结构整体移动,从而使得连接缆能够持续正对于某个特定的位置,而在该位置处连接缆(即钢缆)能够较好缠绕并卡合到相应位置的缠绕槽10中,所以绞盘2在缠绕收卷连接缆的时候,整个绞盘2整体均匀的进行正向或反向活动,并且在该过程中,连接缆也可以均匀且精准的缠绕在绞盘2上,并没有发生重叠等情况。其中在其中一个支撑座5上具有距离传感器(与控制器电连接),其能够传感支撑板8的位置,然后判断绞盘2上缠绕了的连接缆的总长度L1,由于连接缆的总长度L是固定的,所以通过距离传感器得到的数据可以得出水下连接缆的长度L2=L-L1。如果水下连接缆的长度L2与超声波探测仪4探测到的水深H之间的差S=L2-H小于阈值一,则表示本体1还在可控且正常接收以及使用的范围内,但是如果S大于阈值一,则表示本体1漂流到了可接受范围之外,需要控制器发出信号控制第一驱动电机3启动,并通过绞盘2将连接缆收紧。
如果定位芯片(比如GPS或北斗定位)定位到本体1的位置在原来的位置范围内,且S小于阈值一,则表示无需收卷连接缆,但是如果定位芯片定位的位置超出了预设的位置,即定位芯片的位移大于阈值二时(比如一个具有斜坡或深坑的河底,此时如果本体1漂流到了该位置的高度,那么很有可能使得S小于阈值一,因为连接缆释放的长度较长,而且超声波探测仪4感应的数据也较大),也需要通过控制器控制第一驱动电机3转动,直到定位芯片的位移小于阈值二。
绞盘2上的限位部11能够对连接缆起到限位的作用,保证连接缆稳定且正常的缠绕在绞盘2上。钢缆限位杆12连接了两个支撑板8,从而使得支撑板8能够更加保持一个稳定的形态,使用稳定性更佳。同时其还能够对连接缆(即钢缆)起到限位的作用,防止连接缆摇摆,保证了连接缆缠绕到绞盘2上的动作可以稳定的进行。
导向杆13能够对支撑板8起到限位的作用,从而使得支撑板8能够稳定的进行活动,提高了支撑板8的活动稳定性;同时也对支撑板8和绞盘2等起到了支撑作用,对驱动丝杆6起到了保护作用,延长了整个设备的使用寿命。
需要说明的是,本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。