一种光伏幕墙空腔清洁机器人的清洁吸附装置
文献发布时间:2023-06-19 10:51:07
技术领域
本发明涉及机器人领域,特别涉及一种用于光伏幕墙空腔环境下清洁机器人的清洁吸附装置。
背景技术
光伏幕墙空腔是一种绿色、美观的新式建筑,既能够很好的采光,又能同时利用光源发电,在未来有很大的发展前景。但是,随着时间的积累,光伏幕墙空腔内积灰较多,既影响建筑美观,又影响空腔采光发电能力,造成极大浪费。目前光伏幕墙空腔清洁由于环境狭窄,线路复杂,采用人力清洁已经达不到要求,必须研制一款适合狭窄空腔地形的清洁爬壁机器人。现有的清洁爬壁机器人多用于外墙,体积大,质量重,主要原因是吸附装置和清洁装置相互独立,难以适应狭窄复杂的光伏幕墙空腔环境。所以研制一款清洁和吸附装置一体的新型清洁吸附装置尤为重要,这将极大的利于爬壁机器人的体型缩小,加大机器人设计的灵活性。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种用于光伏幕墙空腔清洁机器人的清洁吸附装置。
为了实现上述目的,本发明采用了如下技术方案:
一种用于光伏幕墙空腔清洁机器人的清洁吸附装置,包括第一部件,第二部件,第三部件和密封空腔。所述第一部件为抬升装置,负责提升和下放第二部件,第三部件和密封空腔,为机器人越障提供准备条件,所述第一部件包括气缸,固定支架,磁感应器和活塞端盖,所述气缸设有磁感应器,气缸通过固定支架连接于机器人本体,通过活塞端盖安装于密封空腔上方,磁感应器用于用于确定气缸活塞行程;所述第二部件为吸附装置,与第三部件共同安装于密封空腔内部,为机器人爬壁提供真空负压吸附条件,所述第二部件包括吸附电机和真空吸附叶轮,所述吸附电机输出轴连接真空吸附叶轮,驱动真空吸附叶轮高速旋转使密封空腔形成真空环境;所述第三部件为清洁装置,通过过滤网与第二部件隔开,配合第二部件达到光伏幕墙空腔清洁除尘的效果,所述第三部件包括过滤网,集尘室,驱动电机,齿轮和起尘刷,过滤网位于集尘室的上方,用于过滤气流中的灰尘,集尘室吸尘口与起尘刷水平相连,所述驱动电机输出轴通过齿轮与起尘刷连接,驱动起尘刷旋转扫除灰尘;所述密封空腔为清洁吸附装置外壳,用于固定和安装第一部件,第二部件和第三部件。
作为优选的,所述气缸为内置磁环的双轴气缸,其行程不小于50mm,双轴气缸可以增加固定刚度,所述磁感应器可以通过内置磁环判断活塞行程,所述活塞端盖为带缓冲垫端盖。
作为优选的,所述吸附电机为直流无刷电机,真空吸附叶轮为螺旋桨叶。
作为优选的,所述集尘室分为左右两部分,清洁吸附装置吸附在墙面时,右部分应位于左部分下方,左部分包括吸尘口最左侧的通气层,所述通气层包括内外两层,每层包括多个圆孔,两层上的圆孔位置相互交错,交错圆孔用于增大气体流量,同时过滤灰尘,左部分和过滤网构成一个上集尘空间;右部分设有圆锥漏斗,通过圆锥漏斗使上集尘空间收集的灰尘落进集尘室的右部分的下集尘空间。作为优选的,所述驱动电机为直流电机或减速电机,所述齿轮为行星齿轮,所述起尘刷为鬃毛清洁刷。起尘刷能够将厚重的浮灰扫入集尘室,也能将因静电吸附于墙面的灰尘扫起而便于吸入集尘室。
作为优选的,所述密封空腔分为上下两部分,上部分作为电机保护罩,用于承载第二部件,其顶部设有透气小孔,下部分用于承载第三部件和缓冲装置。
作为优选的,所述密封空腔设有缓冲装置和密封橡胶圈,所述缓冲装置安装在密封空腔外侧,用于提供防撞保护;所述密封橡胶圈安装于密封空腔底部,用于贴实密封空腔和被吸附墙面,防止空气泄漏。
作为优选的,所述缓冲装置内部包括光电传感器,超声波测距传感器和缓冲弹簧。
本发明利用第一部件的气缸伸缩,带动第二部件,第三部件和密封空腔整体抬升,下放的动作,为机器人跨越障碍物提供准备条件,控制第二部件中吸附电机的旋转速度,驱动真空吸附叶轮高速旋转,在密封空腔中形成真空负压环境,为机器人爬壁和清洁吸尘提供吸附力,控制第三部件中驱动电机运转,通过行星齿轮带动软毛起尘刷旋转,扫除清洁墙面的浮灰和因为静电吸附更紧密的积尘,扫起的灰尘随着空气循环流入集尘室,集尘室左部分设有通气层,通气层利于增大气体流量,增加吸附力,同时交错的圆孔有效防止上集尘空间灰尘回流,集尘室右部分可以进一步收集上集尘空间堆积的灰尘,同时圆锥漏斗口可以有效防止灰尘回流。
本发明的有益效果是:
1.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,采用内置磁环的双轴气缸,通过磁感应器可以实时追踪气缸活塞行程,通过控制抬升高度,方便机器人本体应对不同高度的障碍物。
2.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,通过第二部件可以为密封空腔创造真空负压环境,实现机器人本体通过本装置爬壁吸附的功能。
3.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,通过第二部件和第三部件的配合,实现机器人本体吸附工作和清洁工作融合的功能,极大的减小了一般光伏幕墙空腔清洁机器人的体积和重量。
4.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,其内部集尘室的左部分采用的通气层包含多层滤网,每层有多个圆孔,不同层圆孔交错布置的结构既可以增大密封空腔内气体流量,有利于清洁吸附,又能有效防止灰尘通过圆孔回流;集尘室的右部分采用圆锥漏斗口的结构,当机器人本体携带本发明的清洁吸附装置90°吸附于墙面时,灰尘由于重力原因,最终收集于所述集尘室下集尘空间,有利收集,便于回收。
5.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,其设有的缓冲装置,可以有效防止碰撞,减小失误损坏。缓冲装置内部设置的传感器能够实时监控机器人本体运动位置,有利于远程监督控制和机器人本体自动化工作。
6.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,融合抬升装置、吸附装置和清洁装置为一体,大大减小了一般光伏幕墙空腔清洁机器人结构的冗余度,能够在吸附的同时完成清洁功能,便于路径规划,有利于提升一般光伏幕墙空腔清洁机器人的清洁效率。
7.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置,优先适用于十字框架形式光伏幕墙空腔清洁机器人,有利于机器人在狭窄光伏幕墙空腔环境内运动、越障和清洁工作。
8.本发明所述光伏幕墙空腔清洁机器人的清洁吸附装置能够适用于更多爬壁清洁机器人,控制简单,具有较强通用性,有很好的应用前景。
附图说明
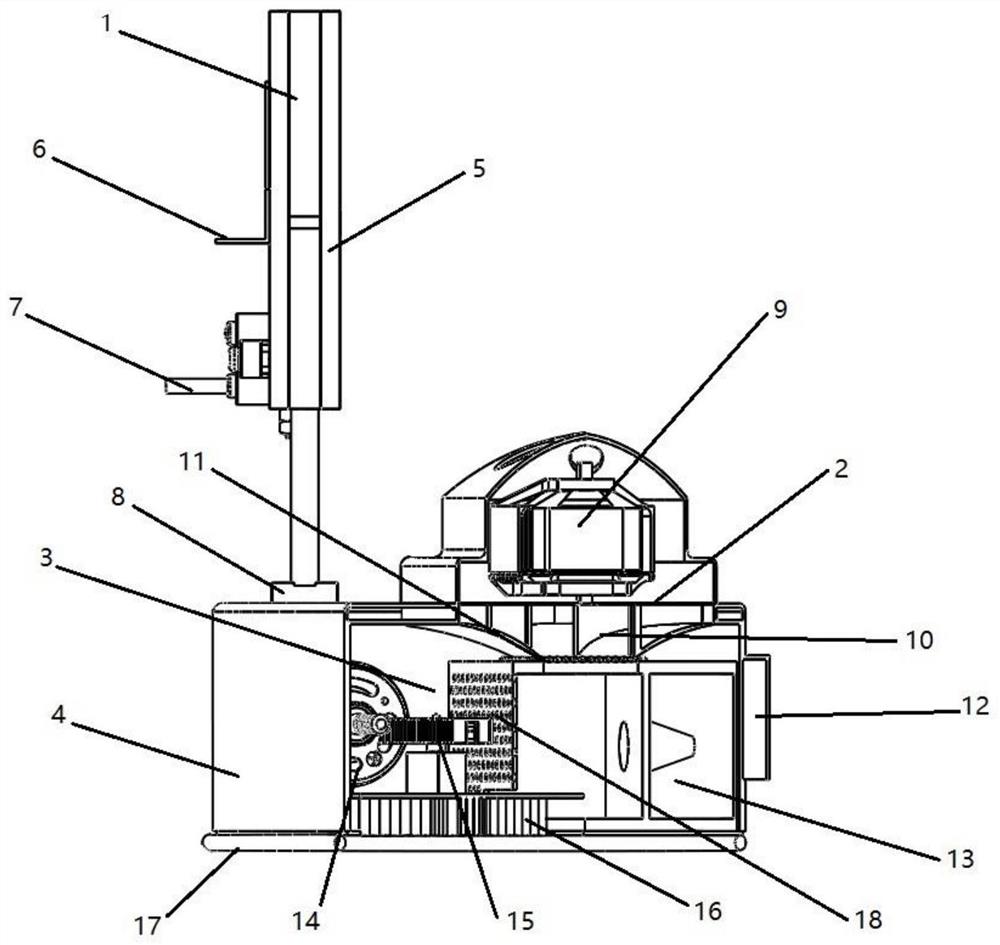
图1是本发明的光伏幕墙空腔清洁爬壁机器人清洁吸附装置结构示意图。
图2是本发明的清洁吸附装置与十字框架形式机器人本体装配关系结构示意图。
图3是本发明的清洁吸附装置准备越障工作结构示意图。
图4是本发明的清洁吸附装置工作状态下气体循环流动线路图。
其中,1、第一部件,2、第二部件,3、第三部件,4、密封空腔,5、气缸,6、安装支架,7、磁感应器,8、活塞端盖,9、吸附电机,10、真空吸附叶轮,11、过滤网,12、缓冲装置,13、集尘室,14、驱动电机,15、齿轮,16、起尘刷,17、密封橡胶圈,18、通气层,19、本发明所述清洁吸附装置,20、机器人本体。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制发明的范围。
结合图1所示,示意性地显示了本发明的光伏幕墙空腔清洁机器人的清洁吸附装置,包括第一部件(1),第二部件(2),第三部件(3)和密封空腔(4)。所述第一部件(1)为抬升装置,负责提升和下放第二部件(2),第三部件(3)和密封空腔(4),为机器人越障提供准备条件,所述第一部件包括气缸(5),固定支架(6),磁感应器(7)和活塞端盖(8),所述气缸(5)设有磁感应器(7),气缸(5)通过固定支架(6)连接于机器人本体,通过活塞端盖(8)安装于密封空腔(4)上方,所述磁感应器(7)用于确定气缸(5)活塞行程;所述第二部件(2)为吸附装置,和第三部件(3)共同安装于密封空腔(4)内部,为机器人爬壁提供真空负压吸附条件,所述第二部件(2)包括吸附电机(9)和真空吸附叶轮(10),所述吸附电机(9)输出轴连接真空吸附叶轮(10),驱动真空吸附叶轮(10)高速旋转使密封空腔(4)内部形成真空环境;所述第三部件(3)为清洁装置,通过过滤网(11)与第二部件(2)隔开,配合第二部件(2)达到光伏幕墙空腔清洁除尘的效果,所述第三部件(3)包括过滤网(11),集尘室(13),驱动电机(14),齿轮(15)和起尘刷(16),过滤网(11)位于集尘室(13)上方,用于过滤气流中的灰尘,所述集尘室(13)吸尘口与起尘刷(16)水平相连,所述驱动电机(14)输出轴通过齿轮(15)与起尘刷(16)连接,驱动起尘刷(16)旋转扫除灰尘;所述密封空腔(4)为清洁吸附装置外壳,用于固定和安装第一部件(1),第二部件(2)和第三部件(3)。
所述气缸(5)为内置磁环的双轴气缸,其行程不小于50mm,双轴气缸可以增加固定刚度,所述磁感应器7可以通过内置磁环判断活塞行程,所述活塞端盖8为带缓冲垫端盖。
所述吸附电机(9)为直流无刷电机,真空吸附叶轮(10)为螺旋桨叶。
所述集尘室(13)分为两部分,清洁吸附装置吸附在墙面时,右部分位于左部分下方,左部分包括吸尘口最左侧的通气层(18),所述通气层(18)包括内外两层,每层包括多个圆孔,两层上的圆孔位置相互交错,交错圆孔用于增大气体流量,同时过滤灰尘,左部分和过滤网(11)构成一个上集尘空间;右部分设有圆锥漏斗,通过圆锥漏斗使上集尘空间收集的灰尘落进集尘室(13)的右部分的下集尘空间。
所述驱动电机(14)为直流电机或减速电机,所述齿轮(15)为行星齿轮,所述起尘刷(16)为鬃毛清洁刷。
所述密封空腔(4)分为上下两部分,上部分作为电机保护罩,用于承载第二部件(2),其顶部设有透气小孔,下部分用于承载第三部件(3)和缓冲装置(12)。
所述密封空腔(4)设有缓冲装置(12)和密封橡胶圈(17),所述缓冲装置(12)安装在密封空腔(4)外侧,用于提供防撞保护;所述密封橡胶圈(17)安装于密封空腔(4)底部,用于贴实密封空腔(4)和被吸附墙面,防止空气泄漏。
所述缓冲装置(12)内部包括光电传感器,超声波测距传感器和缓冲弹簧。
结合图2所示,本发明的清洁吸附装置(19)对于具有X,Y轴两个方向移动能力的机器人普遍适用,优先用于十字框架式光伏幕墙空腔清洁机器人,优先布置位置为机器人两端。
结合图3所示,机器人与本发明所述装置配合使用,机器人包括主控制器和驱动器。工作时,机器人本体(20)的X轴方向吸附,位于Y轴两端的本发明清洁吸附装置(19)通过气缸(5)略微抬起,主控制器通过驱动器驱动吸附电机(9)工作,带动真空吸附叶轮(10)旋转,在真空密封空腔(4)内形成空气循环,同时,主控制器控制驱动电机(14)工作,带动起尘刷(16)旋转,扫起的灰尘因为真空吸附叶轮(10)旋转形成的风力进入集尘室(13),并被过滤网(11)将其与第二部件(2)隔离,以防止灰尘大量进入吸附电机(9)而造成电机卡死及烧损,机器人本体(20)的X轴固定吸附,Y轴的清洁吸附装置横向移动,完成预定路径上的清洁。当完成一块光伏幕墙空腔板的清洁或遇到障碍物时,吸附电机(9)和驱动电机(14)停转,主控制器控制气源装置电磁阀开度,从而给气缸(5)通气,气缸(5)的活塞收缩,带动活塞端盖(8)活动,活塞端盖(8)固定连接密封空腔(4),从而带动整个清洁吸附装置(19)抬起,为机器人本体(20)越障做准备,当十字框架形式的机器人本体(20)Y轴迈过障碍物后,气缸(5)活塞伸长,清洁吸附装置(19)紧贴在墙面,主控制器控制吸附电机9高速旋转,使密封空腔(4)内部形成真空负压环境,此时本发明的清洁吸附装置(19)仅作为吸附装置,吸附的同时,机器人本体(20)X轴抬起,完成越障后,机器人本体(20)的X轴重新吸附,本发明的清洁吸附装置(19)气缸略微抬起,吸附电机(9)和驱动电机(14)起转,清洁吸附装置(19)开始新一轮吸附清洁工作。
工作时,由位于楼顶的电源装置通过电缆为机器人本体(20)和清洁吸附装置(19)供电,由位于楼顶的气源装置通过软管为机器人本体(20)和清洁吸附装置(19)气动系统提供气源,由位于楼顶的安全防护装置通过牵引绳为机器人本体(20)和清洁吸附装置(19)提供安全保护和竖直牵引力。电源装置、气源装置和安全保护装置安装固定在楼顶的车体上,车体可水平移动。
结合图4所示,本发明的清洁吸附装置在清洁工作时,清洁原理如下:吸附电机(9)工作带动真空吸附叶轮(10)高速旋转,密封空腔(4)内部的空气按照图4标注方向流动,此时驱动电机(9)工作带动起尘刷(16)旋转,起尘刷(16)能够将墙面的浮灰和因静电吸附的灰尘扫进集尘室(13),部分灰尘会随着密封空腔(4)的空气循环从集尘室(13)左部分的吸尘口和通气层(18)进入上集尘空间,通过过滤网(11)与第二部件隔开,上集尘空间收集的灰尘因为重力作用又通过集尘室(13)右部分设有的圆锥漏斗口进入下集尘空间,防止灰尘回流。
综上所述,本发明可适用于光伏幕墙空腔清洁机器人的清洁吸附装置,融合抬升装置、吸附装置和清洁装置为一体,极大的减小了一般光伏幕墙空腔清洁机器人清洁吸附装置的体积和重量,有利于机器人在狭窄光伏幕墙空腔内移动和清洁工作,同时又为其在复杂光伏幕墙空腔内越障提供准备条件,提高了机器人工作的灵活性。该清洁吸附装置配有传感器和控制器,搭配光伏幕墙空腔清洁机器人本体能够自主完成清洁、吸附、越障功能,避免高楼人工清洁作业的危险性,能够解放大量劳动力,适应当前社会发展的客观需要,解决了当前光伏幕墙空腔难清洁,清洁效率低,清洁时间受限等问题,可节约高昂人工清洁成本及保险费用,提升了光伏幕墙空腔清洁工作的清洁效率和经济效率。
- 一种光伏幕墙空腔清洁机器人的清洁吸附装置
- 一种光伏幕墙空腔清洁机器人