一种摆线针轮或少齿差式差动减速装置以及减速机
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及机械传动领域及机电一体化领域,尤其是涉及减速机、机器人、仿生机器人领域。
背景技术
现有已公开的技术中,公开号为CN112013094A的中国专利申请部分地解决了公开号为CN109268452A、CN111005987A、CN111022588A等申请中公开的与其类似的差动式减速机的振动问题,但这类发明申请的技术方案中存在着的需要偏心轴承承受2倍于同样输出力矩的摆线针轮减速机或少齿差减速机上的偏心轴承所承受的作用力的问题和这种减速装置中的的其它轴承更是要额外地承受相等于上述这种作用力的问题并未得到解决。
发明内容
本发明的目的是为了进一步全面或部分地解决现有技术的传动装置在传动功率、传动精度、使用寿命与体积、重量、简单性、可靠性、经济性之间的矛盾,提出一种减速装置以及减速机。
本发明的另一个目的是提出一种减速装置和减速机使机器人、仿生机器人、各种控制方式下的执行装置、人工智能的执行装置、人体外骨骼装置等机器的成本降低、易于制造和轻便高效,以及结合自有控制系统、超高分辨率编码器等技术后在性能优于现有技术的机器、机器人、设备的同时成本更低、更有利于产业升级。
本发明的另一个目的是提出一种能使各种需要进行力的变换的工具、器械和多用途工具、器械等更合适于使用、运输的传动装置。
用来实现本发明目的的减速装置和减速机的主要构成是:
至少有2个传动件A;至少有1个传动件B;至少有2个传动件C;传动件C与传动件B同轴心线地交错并列;传动件A同时与至少一个传动件B和至少一个传动件C形成传动关系;传动件A与B之间的传动比不等于传动件A与C之间的传动比;传动件B和C上的传动轮可以是各种齿圈,比如针齿圈、渐开线内齿轮等;传动件A上分别与传动件B、C上的传动轮啮合的传动轮则是能与传动件B、C上的传动轮啮合的相应的传动轮,比如渐开线齿轮或摆线齿轮等;传动件A的轴心线与太阳轴的轴心线平行而不重合;传动件A是由太阳轴以偏心轴承或偏心轴等能使传动件A进行行星运动的偏心机构驱动的,偏心机构应当设置成使各个传动件A以公转中心线为中心或对称或等距或均匀或平衡地分布;各个传动件A的公转中心线重合而公转轨迹不重合;传动件C与传动件B同轴心线地交错并列。减速装置可以把传动件B和C因传动件A的转动而引起的相对的机械运动都对外输出,也可以把传动件B、C之一比如C固定在相对于参考系静止的物体上,传动件B输出相对于参考系的机械运动。
本发明的减速装置或减速机具有2个或2个以上的传动件A因而可以使各个传动件A或对称或等距或均匀或平衡地分布以最大限度地平衡离心力,因而有效地解决了现有技术的同类差动减速装置存在的振动问题。
在减速装置或减速机只有2个传动件A时,如需进一步消除振动,可以在太阳轴上的适当位置设置偏心块,也可以使太阳轴为空心结构,并在太阳轴内部空腔的适当位置设置偏心块以消除本发明的减速装置或减速机因偏心轮之间和传动件A之间在轴向上不同位而引起的振动。在减速装置或减速机具有2个传动件A并设置2个偏心块时:在太阳轴的轴向上,把2个传动件A或2个偏心轮之间的中点作为原点,偏心块分布在此原点两边,偏心块离原点的距离越远,消除这种振动所需要的质量就越小,在所用的偏心块的质量下刚好能消除振动的位置就是“适当位置”,偏心块主要消除与其同一边的偏心轴承及传动件A的质心不和另一边的偏心轴承及传动件A的质心在轴向上同位而引起的振动,所以偏心块的偏心方向应当相反于同一边的偏心轴承及传动件A的偏心方向。在减速装置或减速机具有2个传动件A并只能设置1个偏心块时:可以使一个偏心轮、传动件A及相关组件的总质量大于另一个偏心轮、传动件A及相关组件的总质量,因这个质量不同而造成的离心力的不同由偏心块来平衡,在太阳轴的轴向上以具有较大总质量的偏心轮、传动件A及相关组件的重心所在的位置为原点,偏心块设于具有较小总质量的偏心轮、传动件A及相关组件所处位置的相反方向的适当位置处并且偏心块的偏心方向与具有较小总质量的偏心轮、传动件A及相关组件的偏心方向相同。上述所谓“偏心块”等同或近似于“偏心锤”、“离心块”、“离心锤”。当减速装置或减速机具有2个以上传动件A时,则可以使离心力由偏心轮之间及传动件A之间在各个方向都互相抵消而达到上述使用偏心块来达到的振动不但小于现有同类技术的减速装置或减速机,也小于现有技术的RV减速机、摆线针轮减速机、少齿差减速机的效果。
有益效果
本发明公开的技术使传动件B和C作用于传动件A的作用力或反作用力在轴向上得到平衡,同时平衡了因传动件A的公转而产生的离心力而解决现有技术的同类减速装置和减速机的振动问题;还解决了同类现有技术的减速装置与减速机存在着的需要部分轴承额外地承受2倍于同样输出力矩的摆线针轮减速机或少齿差减速机上的偏心轴承所承受的作用力的问题;并且又减少了轴承的使用。本发明公开的技术完全能够在实际应用时得到不低于同类现有技术所能达到的效果的同时又得到本申请上述的所有有益效果而不产生新问题的技术条件。
附图说明
图1为本发明的减速机应用于机械臂关节的示意图。
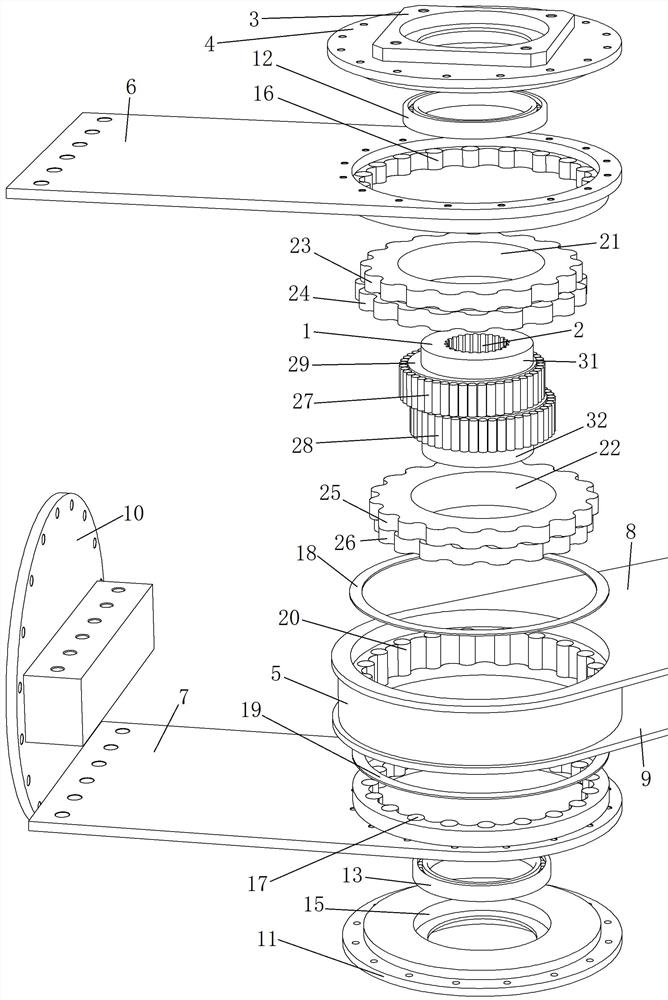
图2为图1所示减速机的爆炸示意图。
图3为本发明的减速装置集合电机并且传动件C利用通心连接杆连接的电—动力模块的示意图。
图4为变化视图方向的图3所示的电-动力模块的示意图。
图5为图3、图4所示的电-动力模块的爆炸示意图。
图6为变化视图方向的图3、图4所示的电—动力模块的爆炸示意图。
具体实施方式
实施例1
本发明的减速机在机器人或机械臂关节上的一种实施例如图1、图2所示:
动力由安装在电机法兰3上的电机通过太阳轴1的内花键2传递给太阳轴。第一个传动件A的内孔21是以太阳轴上第一个偏心轮29为外滚道的圆柱滚子27的内滚道,第二个传动件A的内孔22是以太阳轴上第二个偏心轮为外滚道的圆柱滚子28的内滚道,两个偏心轮的偏心方向相反。当太阳轴转动时就能使两个动件A进行行星运动并使传动件B与节后臂相对于节前臂运动。太阳轴上的轴颈31和端盖4的轴承座孔用来安装轴承12,太阳轴上的轴颈32和端盖11的轴承座孔15用来安装轴承13。第一个传动件A上的传动轮23与一体于节前臂板6的传动件C的针齿轮啮合,圆柱16是这个传动件C的针齿轮的针齿;第一个传动件A上的传动轮24与一体于节后臂板8和9的传动件B的针齿轮啮合。第二个传动件A上的传动轮25也与传动件B的针齿轮啮合,第二个传动件A上的传动轮26与一体于节前臂板7的传动件C的针齿轮啮合,圆柱17是这个传动件C上针齿轮的针齿。圆柱20是传动件B上针齿轮的针齿,图中标5的就是这个实施例的传动件B。挡圈18、19用以协同限定各个传动件上各针齿的轴向位置和减少传动件B与C之间的摩擦。节前臂板6和7都固定在法兰10上,法兰10可以连接于基体或其它减速机,也可以和本发明的实施例2所示电—动力模块的动力输出法兰连接。
实施例2
本发明的减速装置或减速机集合电动机并且传动件C利用通过太阳轴内孔的连接杆连接的电—动力模块的一种实施例如图3、图4、图5、图6所示:
59为传动件C,圆柱58为这个传动件C上的针齿轮的针齿,与这个传动件C一体的机座法兰33可以把减速机连接在基体、参考系物体或其它减速机上,57是用来使这个传动件C与机座法兰之间的刚度能够和标为36的另一个传动件C与机座法兰之间的刚度恰当配合的槽孔,改变槽孔的形状、数量等可以改变这个被标为59的传动件C与机座法兰之间的刚度。滚针47的外滚道是一体于被标为36的传动件C的连接杆65的外圆,滚针47的内滚道是太阳轴48的内孔。连接杆上的半圆槽42与机盖37上的半圆槽41配合成为容纳定位圆柱销43的销孔。本实施例以永磁无刷电机的形式来示例电机的集成,电机定子45装在一体于机盖37的电机壳44内,机盖37固定在机座法兰33内,太阳轴上的46是该电机转子的永磁磁极,附图未表示出电机定子绕组。紧固件38上有螺纹的39旋进连接杆的螺孔40内。第一个传动件A的内孔51是以太阳轴上第一个偏心轮67为外滚道的圆柱滚子49的内滚道,第二个传动件A的内孔52是以太阳轴上第二个偏心轮为外滚道的圆柱滚子50的内滚道,两个偏心轮的偏心方向相反,66是圆柱滚子49的保持架。第一个传动件A上的传动轮53与以圆柱64为针齿轮针齿的传动件C啮合,第一个传动件A上的传动轮54与一体于动力输出法兰35的标为34的传动件B上的以圆柱63为针齿的针齿轮啮合。第二个传动件A上的传动轮56与标为59的传动件C上的针齿轮啮合,第二个传动件A上的传动轮55与传动件B上的针齿轮啮合。挡圈60、挡圈61的作用和形式与实施例1中的挡圈相同,用以协同限定各个传动件上各针齿的轴向位置和减少传动件B与C之间的摩擦。本实施例解决了实施例1在某些应用中动力输出端的旋转角度有限制的问题。
实施例3
把实施例1的传动轮从摆线齿轮、针轮直接换成渐开线齿轮、渐开线内齿轮也能实现本发明的目的。
实施例4
把实施例2的传动轮从摆线齿轮、针轮直接换成渐开线齿轮、渐开线内齿轮也能实现本发明的目的。
实施例5
把实施例1或3中的节前臂、节后臂、以及驱动太阳轴的形式等其中之一或部分或全部进行改变可以使本发明应用于需要进行力的变换的机械上如工具、多用途工具、器械、用具等。比如自动或手摇、手拉千斤顶、压力机、剪切机等等,又比如去掉节后臂,把传动件B的外部做成链轮、齿轮、轧辊、卷筒、凸轮等等形式来成为具有所需功能的各种机器、器械。利用本发明的减速装置变速比大、力矩大、体积小、重量轻等特点,配以可灵活变换的套件,还可以成为抢险救灾等所用的多用途工具、消防工具等。
虽然本发明公开的技术可能会被认为在申请号或专利号为2021100144633的专利申请所公开的技术范围内或普通技术人员能由该专利申请公开的技术内容结合该专利申请提及的专利申请的技术内容得到本申请的技术方案,但由于法律上所指的“普通技术人员”的技术能力的赋予具有较大的主观性,较难确定,因而再提出本申请。本发明的应用面很广,不同的齿廓或以不同的曲线方程得出的不同的齿廓的齿轮比如摆线齿廓、类摆线齿廓、次摆线齿廓、类渐开线齿廓、圆弧齿廓等齿廓的齿轮以及磁轮、摩擦轮、柔轮等都可代入本发明的实施方式中,以及本申请与申请号或专利号为2021100144633的专利申请所公开的内容结合能得到更多的实施方式等,本申请应该是不必一一列举。本申请提出的权利要求未全部包括本申请文件所公开的发明点,因为本申请请求获得保护的最主要目的在于不被其它以这些发明点获得的专利提高本发明应用的成本或阻碍本发明的应用;本申请所述并非是对本申请请求保护的范围作任何的限制,熟知机电邻域及减速机、机器人等相关领域的技术人员进行简单地变通或不需要创造性劳动就能够对本申请文件所公开的技术方法以及实施方式作出的改变与应用皆在本申请请求保护的范围内和本申请公开之后的现有技术的范围内。
- 一种摆线针轮或少齿差式差动减速装置以及减速机
- 三齿联动双曲柄针轮输出摆线少齿差行星减速器