一种飞机漆面自动打磨设备以及方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及飞机表面漆面打磨技术领域,尤其涉及一种飞机漆面自动打磨设备以及方法。
背景技术
在飞机的飞行过程中,由于飞机外表面会与空气摩擦产生高温,会对外表面的漆面造成氧化腐蚀等不良影响,为了防止影响飞机性能和飞行安全,在飞机使用一段时间后需要把飞机外表面的漆面打磨掉,重新烤漆。
而飞机机身具有尺寸大、结构复杂等特点,目前飞机外表面的漆面打磨均是人工作业,缺乏相应的自动化设备,而人工作业具有工作强度大、生产效率低、打磨质量无法保障、粉尘污染严重、危害人体健康、成本费用高等缺点。
因此,现有技术存在缺陷,需要改进。
发明内容
本发明的目的是克服现有技术的不足,提供一种飞机漆面自动打磨设备以及方法。
本发明的技术方案如下:本发明提供一种飞机漆面自动打磨设备,包括:移动机构、工业机器人机构、3D测量机构和恒力打磨机构;
所述移动机构用于带动所述自动打磨设备移动;
所述工业机器人机构设置在所述移动机构上,用于驱动所述3D测量机构和恒力打磨机构;
所述3D测量机构设置在所述工业机器人机构上,用于测量飞机外表面的形状;
所述恒力打磨机构设置在所述工业机器人机构上,用于对漆面进行恒力打磨。
进一步地,所述恒力打磨机构包括打磨头、压力传感器和压力调节结构和压力调节电机,所述打磨头用于对漆面进行打磨,所述压力传感器用于测量打磨压力,所述压力调机电机通过所述压力调节机构实现控制打磨压力。
进一步地,所述3D测量机构包括一3D结构光相机。
进一步地,所述工业机器人四轴或四轴以上工业机器人。
进一步地,所述移动机构包括一AGV小车。
本发明还提供一种飞机漆面自动打磨方法,包括:包括以下步骤:
步骤1:通过3D测量机构测量飞机外表面对应区域的形状;
步骤2:获取飞机外表面对应区域的点云数据;
步骤3:产生可执行程序;
步骤4:将所述可执行程序发送给工业机器人机构执行;
步骤5:所述工业机器人依据飞机外表面的形状来驱动恒力打磨机构对对应区域进行恒力打磨。
进一步地,所述步骤2还包括:将产生的点云数据进行算法优化。
进一步地,所述步骤5中,所述恒力打磨机构在打磨过程中通过压力传感器来测量打磨力度,并通过压力调节电机驱动压力调节机构调节打磨头的位置以实现恒力打磨。
采用上述方案,本发明的有益效果在于:填补了飞机外表面漆面自动打磨技术的空白,克服了飞机表面结构复杂、打磨质量不高等问题,不仅可以实现对飞机表面的漆面进行自动化打磨,并且可以实现恒力打磨,有助于提升打磨效率以及打磨的质量,避免人工打磨对工人健康造成的损害,可以降低人工成本。
附图说明
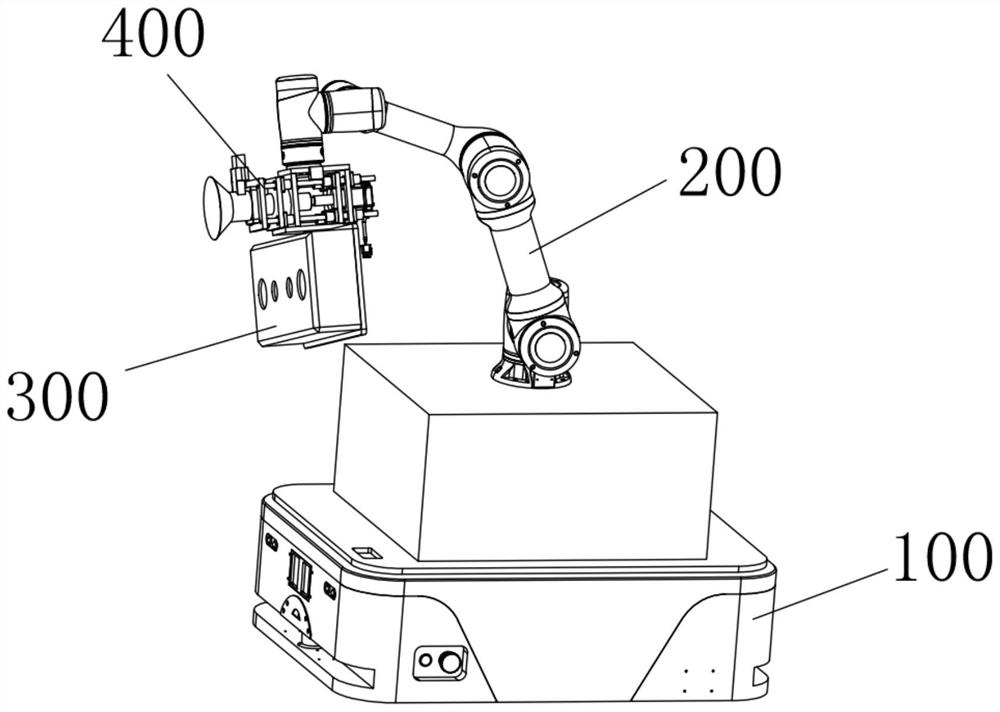
图1为本发明的自动打磨设备的结构示意图。
图2为本发明的恒力打磨机构的结构示意图。
图3为本发明一实施例的自动打磨方法的流程图。
具体实施方式
以下结合附图和具体实施例,对本发明进行详细说明。
请结合参阅图1和图2,在本实施例中,本发明提供一种飞机漆面自动打磨设备,包括:移动机构100、工业机器人机构200、3D测量机构300和恒力打磨机构400;
所述移动机构100用于带动所述自动打磨设备移动;
所述工业机器人机构200设置在所述移动机构100上,用于驱动所述3D测量机构300和恒力打磨机构400;
所述3D测量机构300设置在所述工业机器人机构上,用于测量飞机外表面的形状;
所述恒力打磨机构400设置在所述工业机器人机构200上,用于对漆面进行恒力打磨。
具体地,在本实施例中,所述工业机器人机构200为4轴工业机器人,在其他实施例中,也可以为四轴以上的工业机器人。所述3D测量机构300包括一3D结构光相机。所述移动机构100包括一AVG小车,可以自动移动或者人工操作移动。
具体地,在本实施例中,所述恒力打磨机构包括气振的打磨头410、压力传感器420和压力调节机构430和压力调节电机440,所述打磨头410用于对漆面进行打磨,所述压力传感器420用于实时测量打磨压力,所述压力调机电机440通过所述压力调节机构430实现控制打磨压力。控制恒力打磨的方式具体可以为,当打磨压力过大时,所述调节电机440转动,驱动所述压力调节机构430以带动所述打磨头410后移远离飞机表面,从而降低了打磨压力;当打磨压力过小时,所述压力调节电机440转动,驱动所述压力调节机构430以带动所述打磨头410前移靠近飞机表面,从而增大了打磨压力,保证了整个打磨过程中的打磨力均是恒定的,避免由于打磨力度不均而造成的局部过磨或者打磨不到位等问题,提升了打磨质量。
本发明工作时,所述移动机构100移动带动自动打磨设备移动到指定位置(如距离飞机表面1米位置处),后续通过所述3D测量机构300扫描测量对应区域的飞机表面的形状(本实施例中扫描的区域可以为700mm*800mm),生成对应的点云数据传输至控制系统,再对点云数据进行算法优化以获得更准确的数据,再依据点云数据产生可执行的程序,将程序发送给所述工业机器人机构200执行,所述工业机器人机构200依据飞机表面的形状驱动所述恒力打磨机构400对飞机表面的漆面进行恒力打磨。本方案中,打磨的深度和力度均是可调的,还可以设置打磨深度和打磨力度以实现对飞机表面进行不同程度的打磨,也可以根据需求,设置对飞机表面的打磨遍数,以满足不同的使用需求和工艺要求。当打磨完一个区域以后,可以由人工控制或者自动控制方式,使得所述移动机构100前往下一地点,对下一区域进行打磨。
本发明的飞机漆面自动打磨设备,填补了飞机外表面漆面自动打磨技术的空白,克服了飞机表面结构复杂、打磨质量不高等问题,不仅可以实现对飞机表面的漆面进行自动化打磨,并且可以实现恒力打磨,有助于提升打磨效率以及打磨的质量,避免人工打磨对工人健康造成的损害,可以降低人工成本。
请参阅图3,本实施例中,本发明还提供一种飞机漆面自动打磨方法,包括以下步骤:步骤1:通过3D测量机构测量飞机外表面对应区域的形状;步骤2:获取飞机外表面对应区域的点云数据;步骤3:产生可执行程序;步骤4:将所述可执行程序发送给工业机器人机构执行;步骤5:工业机器人机构依据飞机外表面的形状来驱动恒力打磨机构对对应区域进行恒力打磨。
具体地,在本方案中,所述步骤2还包括:将产生的点云数据进行算法优化,以获得更加准确的数据。
具体地,在本方案中,所述步骤5中,所述恒力打磨机构在打磨过程中通过压力传感器来测量打磨力度,并通过压力调节电机驱动压力调节机构调节打磨头的位置以实现恒力打磨,当所述压力传感器测量到打磨压力过大时,则所述压力调节电机转动,控制所述压力调节机构带动所述打磨头后移以远离飞机表面,实现提高打磨压力;当所述压力传感器测量到打磨压力过小时,则所述压力调节电机转动,驱动所述压力调节机构带动所述打磨头前移以靠近飞机表面,实现降低打磨压力,保证恒力打磨。
本方案中,通过移动机构带动工业机器人机构、3D测量机构、恒力打磨机构到预定位置,通过设置在所述机器人3D测量机构对飞机外表面的形状进行测量,从而产生对应的点云数据发送给控制系统,再对所述点云数据进行算法优化,后续通过点云数据生成可执行程序,并发送给工业机器人机构进行执行,由所述工业机器人机构依据飞机表面的形状驱动所述恒力打磨机构对飞机表面进行打磨,在打磨完成后可以通过所述移动机构移动下一位置,对另一区域的飞机表面进行打磨,可以实现对飞机表面的自动化打磨和恒力打磨,有助于提升打磨效率以及打磨质量,降低了打磨成本。
以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种飞机漆面自动打磨设备以及方法
- 一种基于云服务器功能的漆面自动加热设备及其工作方法