一种三角臂屈曲CAE仿真自动化建模方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明属于底盘开发技术领域,具体涉及一种三角臂屈曲CAE仿真自动化建模方法。
背景技术
底盘强度耐久性能开发中,麦弗逊式悬架下控制臂(三角臂结构)除了要满足刚度、强度、耐久性能外,还应具备足够的稳定性,在轮心向后大载荷作用下,下控制臂不能发生屈曲变形,即麦弗逊式悬架下控制臂的抗屈曲能力应该满足设计要求。
三角控制臂结构屈曲仿真传统的建模过程是:1、网格划分及属性赋予;2、下控制臂内前点施加约束;3、下控制臂内后点施加约束;4、下控制臂外点施加约束;5、下控制臂外点施加载荷;6、输出三角臂结构屈曲计算文件。传统手动建模需要完成6步操作,并且需要记住每个节点应该约束哪些自由度,容易出错,且效率不高。
现有技术还公开了一种轮胎有限元分析自动化建模方法,根据整车CAD模型及对应的结构BOM文件,经过模型调试、试算,实现整车模型自动化建立。现有技术还公开了一种用于CAE仿真的整车自动化建模方法,根据齿面共轭理论确定人字齿轮的渐开线轮廓、齿根过渡曲线及单齿端面的节点坐标,通过编程实现齿轮自动化建模,降低分析人员工作量。现有技术公开了一种渐开线人字齿轮有限元网格自动化建模方法,根据轮胎结构特征及材料分布,对轮胎断面进行网格划分及质量检查,用于有限元分析,缩短产品开发周期。并未见到有关于三角臂屈曲CAE仿真自动化建模方法的发明。
发明内容
本发明的目的就在于提供一种三角臂屈曲CAE仿真自动化建模方法,以解决三角臂屈曲CAE仿真自动化建模的问题。
本发明的目的是通过以下技术方案实现的:
一种三角臂屈曲CAE仿真自动化建模方法,包括以下步骤:
A、手动完成三角臂网格划分及属性赋予;
B、三角臂模型中建立3个节点集合;
C、自动识别第一个节点集合名称,并自动在集合所包含的节点上施加2方向自由度及3方向自由度约束;
D、自动识别第二个节点集合名称,并自动在集合所包含的节点上施加1方向自由度、2方向自由度及3方向自由度约束;
E、自动识别第三节点集合名称,并自动在集合所包含的节点上施加3方向自由度约束,同时沿1方向施加100000N载荷;
F、调用三角臂屈曲计算标准输出模板,自动形成三角臂屈曲计算文件;
其中,所述每个节点有6个自由度,1代表整车坐标系X方向,2代表整车坐标系Y方向,3代表整车坐标系Z方向,4代表绕X轴正向转动方向,5代表绕Y轴正向转动方向,6代表绕Z轴正向转动方向;整车坐标系从车头指向车尾为X轴正向,竖直向上为Z轴正向,Y轴符合右手螺旋定则。
进一步地,步骤A,所述网格划分具体为:手动导入下控制臂几何模型,几何清理完成后,选择2mm的三角形单元网格,自动划分下控制臂表面网格,检查网格质量后,自动划分四面体网格,再将一阶四面体改为二阶四面体网格。
进一步地,步骤A,所述属性赋予具体为:首先,建立铝合金材料属性,然后,选择截面属性,建立属性,最后,将属性赋予网格所在的组件中。
进一步地,步骤C,所述第一个集合中包含的是三角臂后内点。
进一步地,步骤D,所述第二个集合包含的是三角臂前内点。
进一步地,步骤E,所述第三个集合包含的是三角臂外点。
更进一步地,所述步骤C和步骤D,自动识别节点集合名称,节点集合含有下划线,通过下划线后面的数字信息,决定在此集合包含的节点上施加约束自由度。
更进一步地,步骤E,自动识别节点集合名称,通过关键字,决定在此集合包含的节点上施加固定大小和方向的载荷。
与现有技术相比,本发明的有益效果是:
本发明采用TCL脚本语言,通过固化约束节点Set集合名称及加载节点Set集合名称的方法,程序自动识别节点名称,在指定的节点处施加自由度约束,在指定的节点处施加载荷。从而实现三角臂结构屈曲计算文件的自动化生成,降低出错概率,提高工作效率。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
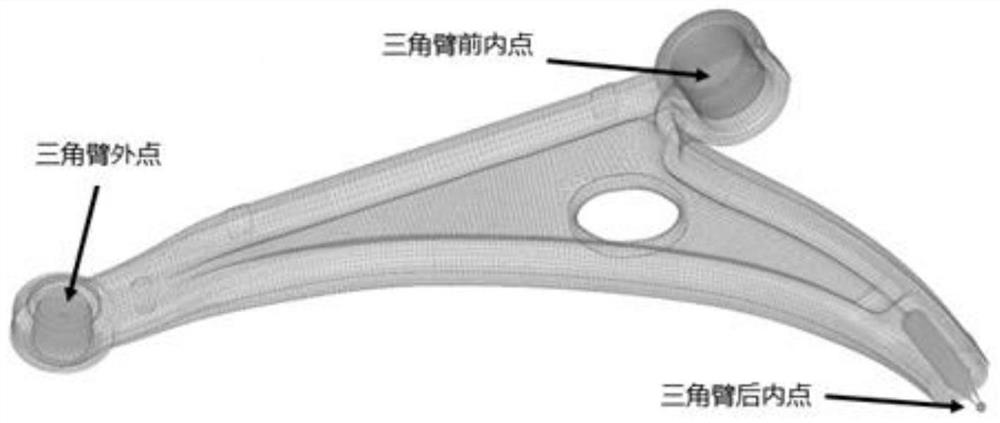
图1三角臂屈曲计算模型示意图。
具体实施方式
下面结合实施例对本发明作进一步说明:
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本发明的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
如图1所示,本发明三角臂屈曲CAE仿真自动化建模方法,包括以下步骤:
A、手动完成三角臂网格划分及属性赋予;
以铝合金下控制臂为例,具体操作如下:
在hypermesh软件中手动导入下控制臂几何模型(*.stp或者*.iges格式文件),几何清理完成后,进入automesh面板,网格大小选择2mm,网格类型选择三角形单元,自动划分下控制臂表面网格,检查网格质量后,进入tetramesh面板,自动划分四面体网格,进入order change面板,将一阶四面体改为二阶四面体网格,至此,网格划分完毕。
属性赋予步骤如下:首先进入material_create面板,建立铝合金材料属性,然后,进入Properties_create面板,选择solid_section截面属性,建立solid属性,最后,进入components_update面板,将solid属性赋予网格所在的components组件中,至此,属性赋予完毕。
B、三角臂模型中建立3个节点集合,3个集合中分别包含三角臂后内点、三角臂前内点以及三角臂外点;
C、程序自动识别第一个节点集合名称,并自动在集合所包含的节点上施加2方向自由度及3方向自由度约束;
D、程序自动识别第二个节点集合名称,并自动在集合所包含的节点上施加1方向自由度、2方向自由度及3方向自由度约束;
E、程序自动识别第三节点集合名称,并自动在集合所包含的节点上施加3方向自由度约束,同时沿1方向施加100000N载荷;
F、程序调用三角臂屈曲计算标准输出模板,自动形成三角臂屈曲计算文件。
ABAQUS的求解计算文件(*.inp文件)包括两部分:模型数据和历史数据。前期的网格划分、属性建立及赋予相应的网格、建立节点set集合等操作属于完成模型数据部分,输出一个*.inp文件。历史数据部分描述的是计算模型如何加载、模型计算输出哪些信息,对于三角臂屈曲计算而言,历史数据的书写方式都是一样的,所以将其固化为模板,待模型数据准备好后,将历史数据写入其后面,就形成了最终的计算文件。
实施例
以某麦弗逊下三角臂为例,三角臂屈曲CAE仿真自动化建模方法,包括以下步骤:
A、手动完成三角臂网格划分及属性赋予;
网格划分:在hypermesh软件中手动导入下控制臂几何模型,几何清理完成后,进入automesh面板,网格大小选择2mm,网格类型选择三角形单元,自动划分下控制臂表面网格,检查网格质量后,进入tetramesh面板,自动划分四面体网格,进入order change面板,将一阶四面体改为二阶四面体网格;
属性赋予:首先,进入material_create面板,建立铝合金材料属性,然后,进入Properties_create面板,选择solid_section截面属性,建立solid属性,最后,进入components_update面板,将solid属性赋予网格所在的components组件中;
B、三角臂模型中建立3个节点Set集合,节点Set集合的名称分别为:spc_23、spc_13、loadnodeset,其中spc_23集合中包含的是三角臂后内点,spc_13节点集合包含的是三角臂前内点,loadnodeset节点集合包含的是三角臂外点;
C、程序自动识别节点集合名称spc_23,并自动在集合所包含的节点上施加2方向自由度及3方向自由度约束。
其中,每个节点有6个自由度,1代表整车坐标系X方向,2代表整车坐标系Y方向,3代表整车坐标系Z方向,4代表绕X轴正向转动方向,5代表绕Y轴正向转动方向,6代表绕Z轴正向转动方向。整车坐标系从车头指向车尾为X轴正向,竖直向上为Z轴正向,Y轴符合右手螺旋定则;
D、程序自动识别节点集合名称spc_13,并自动在集合所包含的节点上施加1方向自由度、2方向自由度及3方向自由度约束;
E、程序自动识别节点集合名称loadnodeset,并自动在集合所包含的节点上施加3方向自由度约束,同时,沿1方向施加100000N载荷;
F、程序调用三角臂屈曲计算标准输出模板,自动形成*.inp文件或其它格式的三角臂屈曲计算文件。
本发明基于TCL脚本语言的二次开发实现三角臂屈曲CAE分析自动化建模。步骤C和步骤D,自动识别节点集合名称,如节点集合spc_23和节点集合spc_13,通过下划线后面的数字信息,决定在此集合包含的节点上施加约束自由度。步骤E,自动识别节点集合名称,如节点集合loadnodeset,通过load关键字,决定在此集合包含的节点上施加固定大小和方向的载荷。步骤F,自动调用三角臂屈曲计算标准输出设置模板文件,自动输出三角臂件屈曲计算文件。
如图1所示,图中三角臂前内点约束1、2、3方向自由度,三角臂外点约束3方向自由度,三角臂后内点约束2、3方向自由度。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种三角臂屈曲CAE仿真自动化建模方法
- 一种二力杆屈曲CAE仿真自动化建模方法