一种适用于薄板件的全自动三坐标测量仿真系统
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及测量仿真系统领域,尤其涉及一种适用于薄板件的全自动三坐标测量仿真系统。
背景技术
三坐标测量机因其高精度、柔性测量等特点成为薄板件产品检测的首选,同时其结果也作为非接触式检测设备采集结果准确性、重复性及再现性等的评价标准,可见,三坐标测量机能够实现薄板件产品待测特征的高准确性测量。相比于传统测量工具,三坐标测量机具有更高的测量精度,最高精度可达1微米,甚至更高,除此之外,三坐标测量机还具有可检测特征种类多的特点。特别适合汽车制造业薄板件产品此类待测特征数众多的应用场合。
驱动一台三坐标测量机完成一整套的薄板件产品的加工程序是一个很复杂的过程,因为要考虑三坐标测量机是否对待测特征可达以及在三坐标测量机运行过程中是否会发生与产品之间的碰撞,需要反复地调整和优化参数甚至更改驱动方案。如果研发过程中采用“制定检测方案–试验分析–调整参数(或改驱动方案)”的模式,往往造成研发周期长,检测方案设计效率低、优化效果不佳。如果能用,计算机仿真系统对三坐标测量机对薄板件产品检测过程,进行模拟分析、获得仿真实验结果、快速进行检测方案设计迭代,则能够有效地提高效率,缩短检测周期。
三坐标测量机仿真系统能够在其内部对产品待测特征逐一进行检测方案编程,并规划三坐标测量机运行路径,并检验所指定的检测方案是否可行。现有认可度较高的三坐标测量机仿真系统有PC-DM IS和ZE ISS的产品,二者也占据了全球大部分的三坐标测量机仿真系统市场。
对于上述三坐标测量机仿真系统仍然存在问题:即对于给定的薄板件产品及其待测特征,现有的仿真系统无法自动化生成检测程序,即控制三坐标测量机的驱动方案,还是依赖于检测工程师对众多待测特征创建测量程序,制定检测方案周期长,效率低。
发明内容
本发明的目的在于提出一种根据产品模型及待测特征信息自动化生成检测方案的测量仿真系统。
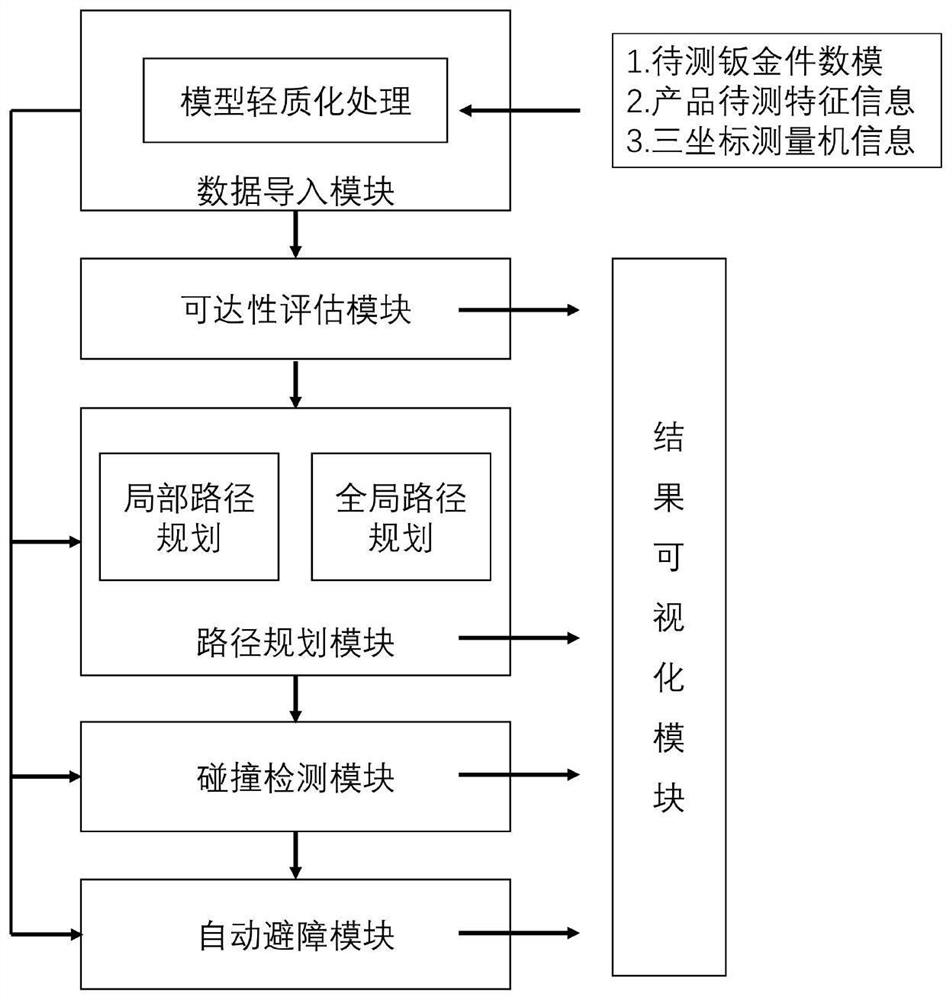
为达到上述目的,本发明提出一种适用于薄板件的全自动三坐标测量仿真系统,包括数据导入模块、可达性评估模块、路径规划模块、碰撞检测模块、自动避撞模块和结果可视化模块;
所述数据导入模块用于将仿真系统所需信息的输入;
所述可达性评估模块用于评估三坐标测量机对所有待测特征的可达性;
所述路径规划模块用于优化求解三坐标测量机检测路径;
所述碰撞检测模块用于检测三坐标测量机路径是否发生碰撞;
所述自动避撞模块用于求解已知原路径碰撞点处的无碰路径;
所述结果可视化模块通过图形显示上述各模块计算结果。
进一步的,所述数据导入模块接收待测薄板件数模、产品待测特征信息和三坐标测量机信息并对数模做轻质化处理;所述薄板件数模轻质化具体处理方式为点云化。
进一步的,所述可达性评估模块与所述数据导入模块连接,接收所述待测薄板件数模、产品待测特征信息和三坐标测量机信息,逐一研究所有待测特征使用某一接长杆连接方式和测量角度是否既满足特征检测标准又不存在测量机与车身的碰撞的情况,并记录可达特征。
进一步的,所述路径规划模块分别与所述数据导入模块和所述可达性分析模块连接,接收所述待测薄板件数模、产品待测特征信息、三坐标测量机信息以及可达性信息,对于所有可达待测特征点进行聚类,先计算每一类待测特征局部最优路径,再计算全局最优路径。
进一步的,所述碰撞检测模块分别与所述数据导入模块和所述路径规划模块连接,接收所述待测薄板件数模、产品待测特征信息、三坐标测量机信息以及最优路径信息,检测基于最优路径下三坐标测量机与模型碰撞点并记录碰撞点信息;所述碰撞检测模块采用基于“移动搜索空间”的动态碰撞检测算法。
进一步的,所述自动避障模块分别与所述数据导入模块、路径规划模块以及碰撞检测模块连接,接收所述待测薄板件数模、产品待测特征信息、三坐标测量机信息、最优路径信息以及碰撞点信息,计算无碰路径,并对原路径做更新;所述自动避障模块采用基于“有效矢量和”的自动避障策略。
进一步的,所述结果可视化模块分别与所述数据导入模块、可达性评估模块、路径规划模块、碰撞检测模块和自动避障模块连接,将待测薄板件数模、产品待测特征信息、可达性分析过程、路径规划过程、碰撞检测以及自动避障过程用图形方式显示出来。
与现有技术相比,本发明的优势之处在于:根据给定的薄板件产品及其待测特征,自动化生成检测方案,同时考虑了复杂结构自动避撞策略与特征聚类等,使仿真系统自动化程度更高,仿真系统规划结果更接近最优路径,提升了检测效率。
附图说明
图1为本发明实施例中适用于薄板件的全自动三坐标测量仿真系统的原理框图。
图2为本实施例中适用于薄板件的全自动三坐标测量仿真系统的使用步骤。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案作进一步地说明。
如图1所示,本发明提出一种适用于薄板件的全自动三坐标测量仿真系统,包括数据导入模块、可达性评估模块、路径规划模块、碰撞检测模块、自动避撞模块和结果可视化模块;
数据导入模块:利用该模块用户可以将待测薄板件数模、产品待测特征信息以及三坐标测量机信息输入至仿真系统,随后,仿真系统对输入的薄板件数模进行轻质化处理,使其成为点云文件,产品待测特征信息包括各待测特征相对于薄板件的位置以及其矢量方向,三坐标测量机信息包括其硬件系统各模块的尺寸信息和运行参数等,如测头、测针尺寸信息、测量机运行速度。
可达性评估模块:该模块逐一研究所有待测特征使用某一接长杆连接方式和测量角度是否既满足特征检测标准又不存在测量机与车身的碰撞。每个尺寸特征在满足检测标准的前提下存在众多可选择的接长杆连接方式和测量角度。通过测量机与薄板件之间的静态碰撞探测,剔除不可达特征,获得每个可达特征对应的接长杆连接方式和测量角度的集合。
路径规划模块:该模块为整个测量仿真系统的核心,整体路径规划分为两部分,一、局部路径规划,对已获取的可达特征集合根据其矢量方向以及位置信息进行聚类,对每一类特征集合使用模拟退火算法进行局部路径规划;二、对于每一类特征局部路径规划结果,再度使用模拟退火算法进行全局路径规划。记录完整的路径规划结果。
碰撞检测模块:该模块基于已规划出的路径方案,采用“移动搜索空间”的碰撞检测算法对测量机运动轨迹与薄板件结构进行动态碰撞检测研究,并记录碰撞点位置集合。相比于层次包围盒法、空间分割法、以及三角面片距离法等碰撞检测算法,“移动搜索空间”碰撞检测算法具有检测速度良好、检测难度低以及检测精度高等优点。
自动避障模块:该模块对于实现自动化检测至关重要,基于已获取的路径规划方案和碰撞点位置,该模块基于“有效矢量和”理论自动查找避障点并结合原路径方案输出无碰路径,实现了“路径–检测–避障”方案闭环。
结果可视化模块:该模块将各模块计算结果通过图形的形式直观的显示出来,以便于用户观察和分析。具体来说,对于给定薄板件数模、待测特征信息已经三坐标测量机信息,该模块可以显示测量仿真系统求解出的可达特征、测量机运行轨迹线、碰撞点和避障点。同时也能将数值结果导出,便于进一步分析。
该仿真系统的使用遵循如图2所示的步骤:
用户首先将待测薄板件数模、产品待测特征信息、三坐标测量机信息按指定文件形式通过所述数据导入模块输入值仿真测量系统;所述各模块会计算各自结果并通过所述结果显示模块以图形的形式显示,最终生成检测方案并仿真运行。
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
- 一种适用于薄板件的全自动三坐标测量仿真系统
- 一种适用于汽车前箱体的三坐标测量夹具