无人机自动复位平台
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及无人机技术领域,尤其涉及一种无人机自动复位平台。
背景技术
随着无人机的兴起,无人机的无人值守机场有了很大的发展。无人机从机场平台起飞,任务完成后返回机场,降落在平台平台上充电或者更换电池。为此,必须将无人机精准地降落到起飞出发前的位置。而现有无人机降落的误差都在±10厘米左右。为了消除误差,精准复位。现在一般都采用“井”字形机械手复位器。即无人机降落后,左右和前后四个机械臂向中间移动,将无人机推移到起飞时的中间位置,实现精准复位。并用机械臂压住无人机的机脚,固定无人机防止风和其它扰动使无人机发生位移偏离。无人机通过机械手实现复位存在以下缺陷:
1、设置机械手的结构较复杂,成本高;
2、机械手需要占用较大的安装空间,增加了整个平台的占用空间;
3、通过机械手复位较麻烦,需要人工监控,难以实现自动复位;
4、复位后需等待机械臂松开后才能起飞,起飞不方便。
并且,无人机复位以后,无人机的螺旋浆容易在风力作用下发生转动,缺少对螺旋浆的限位装置,这样,容易造成无人机晃动,甚至,转动的螺旋浆会碰损其他物件。
发明内容
本发明要解决的技术问题是克服现有技术的不足,提供一种结构简单、占用空间少、成本低、能够使无人机实现自动复位以及便于无人机起飞的无人机自动复位平台。
为解决上述技术问题,本发明采用以下技术方案:
一种无人机自动复位平台,应用于底部具有四个万向轮的无人机,包括支撑台,所述支撑台的中部设有向下凹陷的复位槽,所述复位槽的底面四角处分别设有定位部,两两相邻的定位部之间均连接有导动面,所述导动面的中部比两端高,所述复位槽的侧面为与导动面的外侧边沿连接的渐变面。
作为上述技术方案的进一步改进:
所述定位部设有供无人机万向轮卡入的定位孔。
各所述导动面围合的区间内设有中部高、四周低的限位部。
所述限位部的四周与各导动面的内侧边沿平滑连接。
所述支撑台的底部设有升降座。
所述无人机自动复位平台还包括用于限制无人机螺纹桨旋转的束桨机构,所述束桨机构包括升降支座和束桨套,所述升降支座设于支撑台上,所述束桨套设于升降支座的顶部。
所述束桨机构设有多个,各所述束桨机构的升降支座均固定于支撑台的底部,并绕复位槽的外周间隔布置,所述支撑台与各束桨套对应的位置上均设有供束桨套升降穿行的穿行孔。
所述束桨套为一侧具有开口的弧形体,所述束桨套的开口朝向复位槽设置。
所述束桨套的顶面为中间高、两侧向开口方向倾斜的导入面。
所述无人机自动复位平台还包括多个用于限制无人机螺纹桨旋转的束桨机构,所述束桨机构包括固定支座和束桨套,所述固定支座设于支撑台的下方,所述束桨套设于固定支座的顶部,各所述束桨机构的固定支座绕升降座的外周间隔布置,所述支撑台与各束桨套对应的位置上均设有供束桨套升降穿行的穿行孔。
与现有技术相比,本发明的优点在于:
本发明无人机自动复位平台,无人机降落在支撑台的复位槽上,如无人机的万向轮位于渐变面上,在渐变面的导向作用和自身的重力作用下,无人机的万向轮会沿着渐变面滚动至导动面上(四个万向轮分别移至四个导动面上),然后,在导动面的导向作用和自身的重力作用下,四个万向轮将沿相应的导动面自动滑向较低的定位部,实现重力自动精准复位。本无人机自动复位平台在自身重力作用下就能够自动精准复位,不需要再设备其他辅助设备(如机械手)进行复位,结构简单,占用空间少,成本低。并且,落进定位部的万向轮,由于定位部位置相对四周较低,在定位部四周对万向轮的限位作用下,一般水平方向的风和扰动都不会使无人机发生水平位移,使无人机稳定的处于平台上。并且,当无人机起飞时,万向轮将垂直向上移动,定位部对于万向轮没有向上的阻碍作用,无人机将顺利起飞。本无人机自动复位平台结构简单、占用空间少、成本低、能够使无人机实现自动复位以及便于无人机起飞。
本发明无人机自动复位平台,无人机复位后,万向轮卡入定位孔中,在定位孔的限位作用下,进一步防止万向轮水平晃动,提高了无人机在复位位置的稳定性。
本发明无人机自动复位平台,无人机降落在支撑台的复位槽上,如无人机的万向轮位于限位部上,在限位部顶面的导向作用和自身的重力作用下,无人机的万向轮会沿着限位部的顶面滚动至导动面上(四个万向轮分别移至四个导动面上)。当然,各导动面围合的区间还有其他的形状设计,只要不对落入其上的万向轮具有水平移动限位作用或者向下移动的限位作用即可,保证万向轮能够在自身重力作用下滚动至导动面上。
本发明无人机自动复位平台,在本无人机自动复位平台外一般会罩设外罩,用于对无人机进行防护,外罩的顶部设置可开闭的顶盖,供无人机出入,支撑台的底部设置升降座上,在无人机降落前,顶盖打开,升降座上升将支撑台从外罩顶部顶出,待无人机降落;在无人机降落并复位后,升降座下降,支撑台随着下降,将无人机下降至外罩内,再盖上外罩。
本发明无人机自动复位平台,在无人机复位完成后,束桨机构对无人机的螺纹桨形成束缚作用,防止螺纹桨旋转,避免因螺纹桨旋转而造成无人机晃动,以及避免转动的螺旋浆会碰损其他物件。
附图说明
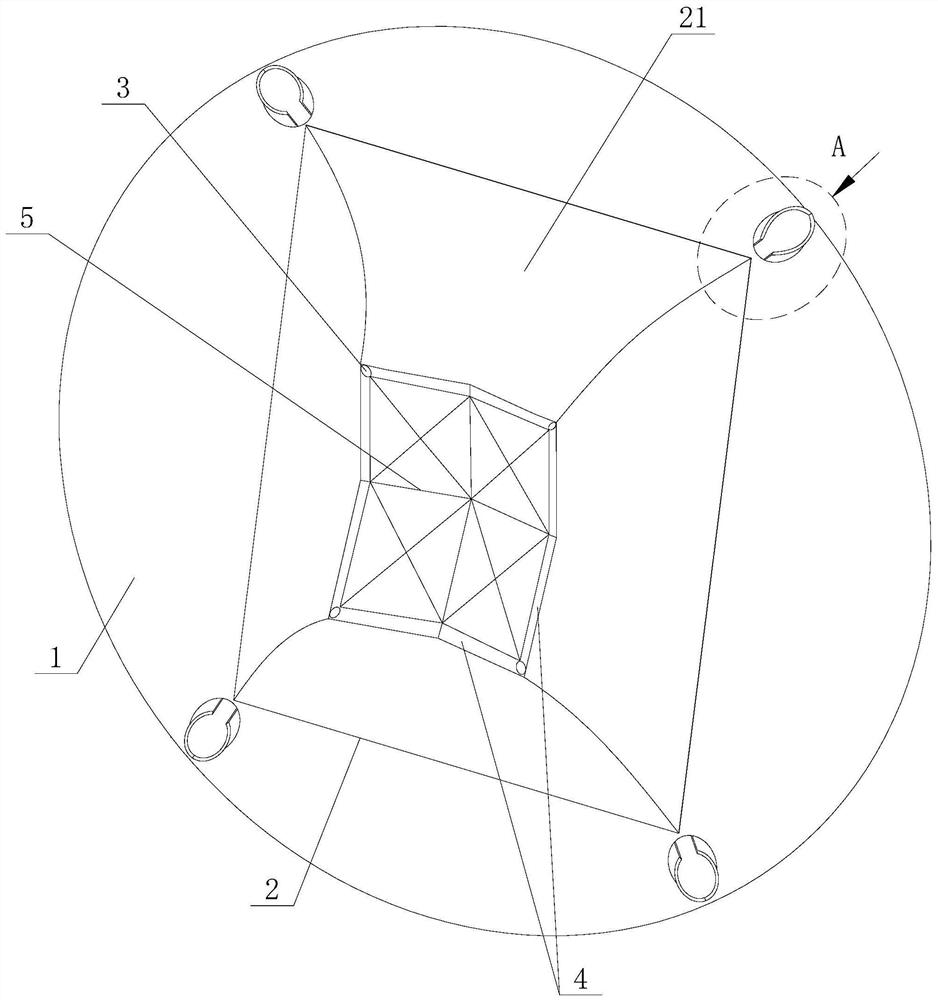
图1是本发明无人机自动复位平台的立体结构示意图。
图2是图1中A处的放大图。
图3是本发明无人机自动复位平台的俯视结构示意图。
图4是图3中B-B的剖视结构示意图。
图5是图4中C处的放大图。
图6是本发明无人机自动复位平台的束桨套的结构示意图。
图7是本发明无人机自动复位平台的束桨套的使用状态图。
图8是本发明无人机自动复位平台的束桨套的另一种实施例的俯视结构示意图。
图9是本发明无人机自动复位平台的另一种实施例的结构示意图。
图中各标号表示:
1、支撑台;11、穿行孔;2、复位槽;21、渐变面;3、定位部;31、定位孔;4、导动面;5、限位部;6、升降座;7、束桨机构;71、升降支座;72、束桨套;721、开口;722、导入面;723、滚动体;73、固定支座;8、叶片。
具体实施方式
以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
实施例一:
图1至图7示出了本发明无人机自动复位平台的一种实施例,本无人机自动复位平台,应用于底部具有四个万向轮的无人机,包括支撑台1,支撑台1的中部设有向下凹陷的复位槽2,复位槽2的底面四角处分别设有定位部3,两两相邻的定位部3之间均连接有导动面4,导动面4的中部比两端高,复位槽2的侧面为与导动面4的外侧边沿连接的渐变面21。导动面4的中部比两端高,即定位部3比导动面4低。
无人机降落在支撑台1的复位槽2上,如无人机的万向轮位于渐变面21上,在渐变面21的导向作用和自身的重力作用下,无人机的万向轮会沿着渐变面21滚动至导动面4上(四个万向轮分别移至四个导动面4上),然后,在导动面4的导向作用和自身的重力作用下,四个万向轮将沿相应的导动面4自动滑向较低的定位部3,实现重力自动精准复位。本无人机自动复位平台在自身重力作用下就能够自动精准复位,不需要再设备其他辅助设备(如机械手)进行复位,结构简单,占用空间少,成本低。并且,落进定位部3的万向轮,由于定位部3位置相对四周较低,在定位部3四周对万向轮的限位作用下,一般水平方向的风和扰动都不会使无人机发生水平位移,使无人机稳定的处于平台上。并且,当无人机起飞时,万向轮将垂直向上移动,定位部3对于万向轮没有向上的阻碍作用,无人机将顺利起飞。本无人机自动复位平台结构简单、占用空间少、成本低、能够使无人机实现自动复位以及便于无人机起飞。
本实施例中,如图5所示,定位部3设有供无人机万向轮卡入的定位孔31。在无人机复位后,万向轮卡入定位孔31中,在定位孔31的限位作用下,进一步防止万向轮水平晃动,提高了无人机在复位位置的稳定性。
本实施例中,如图1、图4和图5所示,各导动面4围合的区间内设有中部高、四周低的限位部5。无人机降落在支撑台1的复位槽2上,如无人机的万向轮位于限位部5上,在限位部5顶面的导向作用和自身的重力作用下,无人机的万向轮会沿着限位部5的顶面滚动至导动面4上(四个万向轮分别移至四个导动面4上)。当然,各导动面4围合的区间还有其他的形状设计,只要不对落入其上的万向轮具有水平移动限位作用或者向下移动的限位作用即可,保证万向轮能够在自身重力作用下滚动至导动面4上。
本实施例中,限位部5的四周与各导动面4的内侧边沿平滑连接。这样设计,降落于限位部5的万向轮,就能够平滑的滚动至导动面4上,减少冲撞。
本实施例中,如图4和图5所示,支撑台1的底部设有升降座6。在本无人机自动复位平台外一般会罩设外罩,用于对无人机进行防护,外罩的顶部设置可开闭的顶盖,供无人机出入,支撑台1的底部设置升降座6上,在无人机降落前,顶盖打开,升降座6上升将支撑台1从外罩顶部顶出,待无人机降落;在无人机降落并复位后,升降座6下降,支撑台1随着下降,将无人机下降至外罩内,再盖上外罩。
本实施例中,如图1至图4所示,无人机自动复位平台还包括用于限制无人机螺纹桨旋转的束桨机构7,束桨机构7包括升降支座71和束桨套72,升降支座71设于支撑台1上,束桨套72设于升降支座71的顶部。在无人机复位完成后,升降支座71带动束桨套72上升,使束桨套72套于无人机的螺纹桨上,防止螺纹桨旋转,避免因螺纹桨旋转而造成无人机晃动,以及避免转动的螺旋浆会碰损其他物件。
本实施例中,束桨机构7设有多个,各束桨机构7的升降支座71均固定于支撑台1的底部,并绕复位槽2的外周间隔布置,支撑台1与各束桨套72对应的位置上均设有供束桨套72升降穿行的穿行孔11。升降支座71固定于支撑台1上,随着支撑台1运动。升降支座71固定于支撑台1的底部,避免干涉无人机的升降运动。在无人机降落前,升降支座71使束桨套72位于低于穿行孔11顶面的位置,避免束桨套72干涉无人机降落运动。在无人机复位完成后,升降支座71带动束桨套72上升,使束桨套72穿过穿行孔11套于无人机的螺纹桨上,防止螺纹桨旋转。当然,在其他实施例中,束桨机构7也可以设置在支撑台1外周,这样,就可以避免开设穿行孔11,但是,务必要加大外罩的大小,增加占地面积,并且,支撑台1难以对外罩内部形成上下分隔,从而难以对支撑台1下方的升降座6起到防护作用。具体地,束桨机构7设有四个,相应地,穿行孔11也设有四个,分别位于复位槽2顶部的四角处,应用于顶部四角均具有四个螺旋桨的无人机。
本实施例中,束桨套72为一侧具有开口721的弧形体,束桨套72的开口721朝向复位槽2设置。便于螺旋桨的外端通过开口721插入束桨套72中。开口721竖向设置,在开口721两侧的阻挡作用,限制螺旋桨转动角,防止螺旋桨旋转或者大角度转动。
本实施例中,如图2、图6和图7所示,束桨套72的顶面为中间高、两侧向开口721方向倾斜的导入面722。应用于顶部四角均具有多个螺旋桨的无人机,该无人机的顶部一般设有多个螺旋桨,绕无人机间隔布置,螺旋桨包括两片叶片8,两片叶片8的一端均可转动地设置在无人机上,便于调节两片叶片8之间的角度,两片叶片8之间还具有弹性复位件,使两片叶片8在无外力的作用下,保护在同线状态。束桨套72在复位完成后,螺旋桨的中心正对下方的束桨套72,升降支座71带动束桨套72上升,使束桨套72的顶面与叶片8接触,随着束桨套72的继续上升,在导入面722的导动推力作用下,螺旋桨的两片叶片8会向束桨套72开口721的方向折收,直到两片叶片8卡入束桨套72的开口721中。在导入面722的导动推力作用下,螺旋桨能够实现自动折收,无需借助其他的外力。并且,由于束桨套72的开口721朝向复位槽2设置,螺旋桨的两片叶片8以中心旋转折收至开口721后,其均位于束桨套72朝复位槽2的一侧,缩小了无人机整体结构的大小,便于无人机下降进行外罩内。相应的,外罩也可以设置的更小,减少了占地空间。
在其他实施例中,如图8所示,可在导入面722的中间位设置滚动件723,如滚轮、滚球、轴承等,便于将螺旋桨的两片叶片8导入至导入面722中部两侧的倾斜面(曲面)上,防止螺旋桨的叶片8在导入面722的中间位形成顶死,不能转动折收。
在其他实施例中,升降支座71也可以相对支撑台1独立设置,避免受支撑台1升降运动的影响。
实施例二:
图9示出了本发明无人机自动复位平台的另一种实施例,本无人机自动复位平台,应用于底部具有四个万向轮的无人机,包括支撑台1,支撑台1的中部设有向下凹陷的复位槽2,复位槽2的底面四角处分别设有定位部3,两两相邻的定位部3之间均连接有导动面4,导动面4的中部比两端高,复位槽2的侧面为与导动面4的外侧边沿连接的渐变面21。导动面4的中部比两端高,即定位部3比导动面4低。
无人机降落在支撑台1的复位槽2上,如无人机的万向轮位于渐变面21上,在渐变面21的导向作用和自身的重力作用下,无人机的万向轮会沿着渐变面21滚动至导动面4上(四个万向轮分别移至四个导动面4上),然后,在导动面4的导向作用和自身的重力作用下,四个万向轮将沿相应的导动面4自动滑向较低的定位部3,实现重力自动精准复位。本无人机自动复位平台在自身重力作用下就能够自动精准复位,不需要再设备其他辅助设备(如机械手)进行复位,结构简单,占用空间少,成本低。并且,落进定位部3的万向轮,由于定位部3位置相对四周较低,在定位部3四周对万向轮的限位作用下,一般水平方向的风和扰动都不会使无人机发生水平位移,使无人机稳定的处于平台上。并且,当无人机起飞时,万向轮将垂直向上移动,定位部3对于万向轮没有向上的阻碍作用,无人机将顺利起飞。本无人机自动复位平台结构简单、占用空间少、成本低、能够使无人机实现自动复位以及便于无人机起飞。
本实施例中,定位部3设有供无人机万向轮卡入的定位孔31。在无人机复位后,万向轮卡入定位孔31中,在定位孔31的限位作用下,进一步防止万向轮水平晃动,提高了无人机在复位位置的稳定性。
本实施例中,各导动面4围合的区间内设有中部高、四周低的限位部5。无人机降落在支撑台1的复位槽2上,如无人机的万向轮位于限位部5上,在限位部5顶面的导向作用和自身的重力作用下,无人机的万向轮会沿着限位部5的顶面滚动至导动面4上(四个万向轮分别移至四个导动面4上)。当然,各导动面4围合的区间还有其他的形状设计,只要不对落入其上的万向轮具有水平移动限位作用或者向下移动的限位作用即可,保证万向轮能够在自身重力作用下滚动至导动面4上。
本实施例中,限位部5的四周与各导动面4的内侧边沿平滑连接。这样设计,降落于限位部5的万向轮,就能够平滑的滚动至导动面4上,减少冲撞。
本实施例中,支撑台1的底部设有升降座6。在本无人机自动复位平台外一般会罩设外罩,用于对无人机进行防护,外罩的顶部设置可开闭的顶盖,供无人机出入,支撑台1的底部设置升降座6上,在无人机降落前,顶盖打开,升降座6上升将支撑台1从外罩顶部顶出,待无人机降落;在无人机降落并复位后,升降座6下降,支撑台1随着下降,将无人机下降至外罩内,再盖上外罩。
本实施例中,无人机自动复位平台还包括用于限制无人机螺纹桨旋转的束桨机构7,束桨机构7包括固定支座73和束桨套72,固定支座73设于支撑台1的下方,束桨套72设于固定支座73的顶部。在无人机降落前,顶盖打开,升降座6上升将支撑台1从外罩顶部顶出,待无人机降落,并且,此时,束桨套72位于支撑台1下方,避免干涉无人机的降落;在无人机降落并复位后,升降座6下降,支撑台1随着下降,将无人机下降至外罩内。在支撑台1的下降过程中,束桨套72相对支撑台1上升,当无人机下降至外罩内所定位置时,无人机的螺旋桨套于束桨套72上,防止螺纹桨旋转。本实施例相当实施例一,固定支座73固定设置,可设置在升降座6的底部,不受升降座6的升降影响,固定支座73没有升降支座71的升降功能,结构更加简单,操作更加方便。
本实施例中,束桨机构7设有多个,各束桨机构7的固定支座73绕升降座6的外周间隔布置,支撑台1与各束桨套72对应的位置上均设有供束桨套72升降穿行的穿行孔11。
当然,在其他实施例中,束桨机构7也可以位于支撑台1的外周,这样,就可以避免开设穿行孔11,但是,务必要加大外罩的大小,增加占地面积,并且,支撑台1难以对外罩内部形成上下分隔,从而难以对支撑台1下方的升降座6起到防护作用。具体地,束桨机构7设有四个,相应地,穿行孔11也设有四个,分别位于复位槽2顶部的四角处,应用于顶部具有四个螺旋桨的无人机。
本实施例中,束桨套72为一侧具有开口721的弧形体,束桨套72的开口721朝向复位槽2设置。便于螺旋桨的外端通过开口721插入束桨套72中。开口721竖向设置,在开口721两侧的阻挡作用,限制螺旋桨转动角,防止螺旋桨旋转或者大角度转动。
虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
- 无人机自动复位平台
- 基于激光测距雷达的无人机复位平台