具有吸振器质量的飞轮
文献发布时间:2023-06-19 09:23:00
本发明涉及一种飞轮装置,其用于航天器的姿态稳定,特别是用于卫星的姿态控制。
已知此类飞轮或反作用轮用于控制卫星的指向。飞轮通过驱动装置产生旋转,从而可以通过陀螺效应达到稳定效果。为了获得有效的陀螺效应,将飞轮质量的尽可能大的部分定位在尽可能远的外侧是有利的,这使得该质量可以以尽可能大的直径围绕飞轮的旋转轴旋转。
从DE 39 21 765 A1中已知这样的飞轮装置,其类似于自行车车轮,具有内部定子、外部转子和轮毂,该轮毂借助于定子上的轮辐可旋转地支撑转子。轮毂通过两个滚动轴承可旋转地支撑在定子上,这两个滚动轴承可以设计为固定轴承和浮动轴承。
在运行过程中摩擦越小,这种飞轮的效率就越高。这种摩擦主要取决于轴承单元的尺寸及其预紧力。起飞(卫星运载火箭发射)情况下的轴承载荷决定了轴承单元的尺寸,因为该轴承单元必须无损地承受发射过程中的载荷(加速度、振动)。轴承的可能载荷取决于火箭以及取决于飞轮的共振,因为振动激励会导致轴承载荷的过度共振。
因此,采取可以避免这种过度共振和与之相关的高轴承载荷的预防措施可以是有意义的。
因此,本发明的目的在于,提供一种用于航天器的姿态稳定的飞轮,其中,影响,特别是降低不期望的共振是可能的。
该目的通过具有权利要求1的特征的飞轮来实现。有利的实施方案在从属权利要求中给出。
提供一种用于航天器的姿态稳定的飞轮,其具有:轮毂装置,用于固定飞轮;飞轮环,其间隔一定距离地在外侧环绕轮毂装置;支撑装置,用于将飞轮环支撑在轮毂装置上;以及具有吸振器质量装置的减振装置,该吸振器质量装置可以关于飞轮的旋转轴,相对于飞轮环轴向地往复运动。
具有轮毂装置、飞轮环和支撑装置的飞轮的结构本身是已知的。支撑装置特别是可以具有径向地在轮毂装置和飞轮环之间延伸的轮辐。
轮毂装置用于以合适的方式固定飞轮,例如固定在轴承装置上,通过该轴承装置将飞轮可旋转地安装在定子上。
支撑装置从轮毂装置径向向外延伸,并且合理地在其径向外侧支撑飞轮环。飞轮环将实际用于在旋转中稳定姿态的质量集合在一起,以这种方式实现所期望的陀螺效应。
连接到轮毂装置的轴承装置及支撑该轴承装置的定子不是飞轮的一部分。
轮毂装置、支撑装置和飞轮环应牢固地相互连接。可以特别有利的是,将轮毂装置、支撑装置和飞轮环制成为一件式,例如作为加工的铸件。也可能的是,轮毂装置、支撑装置和飞轮环由金属块切削加工而成。作为材料适合的是钢,特别是不锈钢,但铝也适合。外径可以在80mm至400mm的范围内,更大或更小的尺寸也是可能的。
减振装置具有吸振器质量装置,该吸振器质量装置可以在轴向上相对于飞轮环往复运动,即振荡。吸振器质量装置的轴向可动性应当至少在小范围内是可能的,即可以具有低振幅。在此已经发现,振幅小于5mm,优选甚至小于1mm,例如在0.2-0.3mm的范围内就可以足够。
特别是当火箭发射时,飞轮(主要是位于外侧的飞轮环)可能会由于相应的振动影响而产生危险的共振,这可能导致轴承载荷过高,最终甚至可能导致支撑飞轮的轴承装置损坏。通过适当地协调吸振器质量装置,可以使相对于飞轮环作轴向往复运动的吸振器质量装置形成反向振动,以此方式减弱飞轮环或与其相连的其他部件(特别是支撑装置)的强烈振动,即“吸振”。以此方式,可以实现高效的减振。
吸振器质量装置可以通过固定装置固定在飞轮环上和/或支撑装置上,其中,该固定装置设计成,它使得吸振器质量装置具有轴向可动性。
因此,固定装置可以是减振装置的一部分,并提供所期望的吸振器质量装置的振荡的轴向可动性。
可选地,还可能的是,固定装置也使得吸振器质量装置具有径向自由度。然而,相比轴向运动,径向上的运动可以明显较小。
固定装置可以至少在一个区域内具有弹性变形能力,其中,通过该固定装置的弹性变形能力能够实现吸振器质量装置的轴向可动性。这意味着固定装置可以具有刚性不同或弹性变形能力不同的区域。该弹性变形能力(较低的刚度)应大于飞轮的其他部件,尤其是飞轮环或支撑装置(例如轮辐)的变形能力。固定装置的刚性构造区域用于实际固定吸振器质量装置,而弹性变形能力提高的区域则用于允许吸振器质量装置的相对运动。
吸振器质量装置可以具有多个吸振器质量元件,这些吸振器质量元件间隔一定距离地分布在圆周上,并由固定装置保持。单个吸振器质量元件可以设计成例如圆柱形、桶形或长方体形状的钢元件,并且其质量例如在20g-150g的范围内,特别是40g-100g的范围内,例如约为60g。
吸振器质量元件由固定装置以合适的方式保持。此处的目的是通过固定装置弹性地保持吸振器质量元件,以实现可动性或振动。
特别是,吸振器质量元件在此应在轴向上相对于飞轮环(振荡)可动。此外,可以有利的是,固定装置也允许吸振器质量元件的径向可动性(径向自由度),但其中在径向上的运动明显小于在轴向上的运动。
在一个实施方式中,固定装置可以具有两个阻尼环,这两个阻尼环彼此轴向地布置,使支撑装置至少部分地布置在它们之间。在此,阻尼环可以这样彼此固定,即,使得支撑装置在轴向上布置在这两个阻尼环之间。
因此,两个阻尼环固定在支撑装置上,并且例如可以将该支撑装置夹紧在它们之间。而该阻尼环本身又用作固定装置,以支撑吸振器质量装置。
支撑装置可以例如由在轮毂装置和飞轮环之间径向延伸的多个轮辐形成。两个阻尼环则分别将该轮辐的一个区域包围在它们之间。
轮辐的数量应为奇数,优选符合质数。由此,在共振行为中不形成驻波或其他不希望的固有运动。
吸振器质量装置特别是可以具有多个吸振器质量元件,其中,这些吸振器质量元件被保持在阻尼环之间,并且可以布置为沿该阻尼环的圆周方向分布。在此,阻尼环可以沿其圆周具有弹性较高(刚度较低)的区域和弹性较低(刚度较高)的区域,其中,吸振器质量固定在弹性较高的区域中。因此,弹性较高的区域允许各个吸振器质量元件以期望的方式运动,以使吸振器质量元件可以相对于飞轮环或飞轮的其余部分轴向地振动。
可以通过以下方式实现较高和较低弹性的区域:将阻尼环的局部做得更薄,或者在局部进行额外的加固(以实现较高的刚度)。
支撑装置可以具有分布在圆周上的多个轮辐,这些轮辐径向地在轮毂装置和飞轮环之间延伸。在此,吸振器质量元件可以布置在轮辐之间的相应空间中,并由阻尼环保持。特别是,吸振器质量元件可以在圆周方向上居中地保持在轮辐之间。相应地,吸振器质量元件的数量可以等于轮辐的数量。
为了达到期望的减振效果,有意义的是,吸振器质量装置的主共振能够调节为基本上对应于飞轮环或整个飞轮的主共振,其中,该吸振器质量装置的主共振能够通过协调吸振器质量元件的重量和固定装置的弹性变形能力来调节。
可以设置定心装置,以使减振装置相对于飞轮环定心。定心装置例如可以具有合适的定心辊,该定心辊抵靠飞轮环的内径,并且用于减振装置的同心安放并由此减少不平衡。
在具有可以实现进一步的减振效果的可选附加件的变型中,阻尼环可以这样彼此固定,即,使得该阻尼环(一方面)与支撑装置(另一方面)之间可以相对运动。因此,可能的是,将阻尼环彼此固定,例如拧紧,并且将支撑装置(例如轮辐)夹紧在该阻尼环之间。在两个阻尼环之间维持有预定的特定预紧力的情况下,可以实现阻尼环与支撑装置之间的有针对性的摩擦运动。
在一个变型中,可以在阻尼环与支撑装置的各个接触面的区域中,在各个阻尼环和支撑装置的相应区域之间至少部分地设置摩擦垫。
如果阻尼环固定在支撑装置上,使得阻尼环和支撑装置之间的相对运动是可能的,则可以通过插入摩擦垫来支持该期望的可动性。该摩擦垫允许在阻尼环和支撑装置之间产生限定的摩擦。
例如,摩擦垫可以放置在用作支撑装置的轮辐的外端上,并由阻尼环夹紧。在低振动激励的情况下,该夹紧力确保了阻尼环牢固地与飞轮质量(即特别是飞轮环)的运动相耦合,并且确保所有运动都传递到阻尼环。这特别是适用于在飞轮的具有轴向振幅的振荡运动。
如果飞轮质量的主模式之一被激励,则飞轮环相对于轮毂装置振动。该简正模是临界情况,其振幅必须在共振情况下保持尽可能小。一旦振动幅度变大以至于在阻尼环的接触面上超过了静摩擦,该阻尼环就开始相对于摩擦垫滑动。由此产生了两个具有不同共振频率的系统,它们彼此相对运动。新产生的动能以摩擦热的形式消散。
减振装置的主共振频率应尽可能接近整个飞轮质量的主共振频率。一方面在吸振器质量元件的重量上进行协调(特别是通过调节尺寸),另一方面在吸振器质量元件的连接刚度上进行协调(例如通过调节阻尼环的横截面)。每个飞轮质量类型必须进行一次这种协调。如果设计了新的飞轮质量或新的飞轮质量类型,则必须使用FEM模拟来设计吸振器质量的尺寸和重量。固定装置(例如阻尼环)与吸振器质量元件的共振导致相对运动的增强,并因此导致能量耗散,而这导致阻尼增强。
一方面,减振效果可以通过吸振器质量装置实现。此外,可选地,还可以通过阻尼环与支撑装置(例如轮辐)之间的接触面中的有针对性的摩擦来实现额外的振动阻尼。
吸振器质量元件和支撑它们的阻尼环这样配合,即,使得在上述共振情况下,吸振器质量元件与在轴向上振动的飞轮环相反地振动,从而吸收或阻尼振动。原则上,能量从振动的飞轮环转移到几乎“保持相反”的振动的吸振器质量上。
以这种方式构造的飞轮的重量可以例如在100g至约20kg的范围内。利用适当配备的飞轮可以实现例如高达100Nms,甚至高达150Nms的角动量。
下面结合实施例参照附图对上述及其他优点和特征进行详细说明。在附图中:
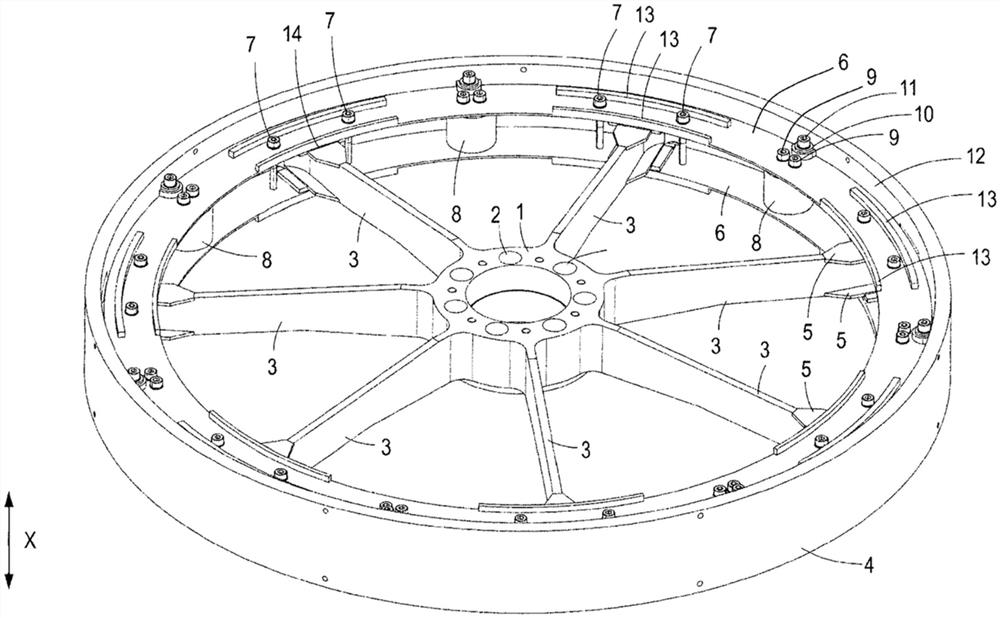
图1以立体图示出了飞轮;
图2以截面图示出了图1中的飞轮;
图3示出了图1中的飞轮的俯视图;
图4示出了沿图3中的线B-B的截面图;
图5示出了另一截面图;
图6示出了用于说明摩擦垫的截面图;
图7示出了带有吸振器质量元件的截面图。
图1至图4分别以不同的图示示出了飞轮。
该飞轮具有轮毂1,该轮毂具有多个孔2,轮毂1可以通过这些孔固定到未示出的轴承装置上。通过该未示出的轴承装置,飞轮可旋转地静止或进行旋转,以实现期望的陀螺效应。
用作支撑装置的多个轮辐3从轮毂1径向向外延伸。在图1所示的实施方式中总共设置有七个轮辐3。通常,建议的轮辐数量是奇数,优选符合质数。如图3所示,出于重量原因,轮辐3保持相对较细。
轮辐以本身已知的方式在其端部共同支撑环形的飞轮环4。可以在轮辐端部设置相应的支撑元件5,用于稳定和精确支撑。
到目前为止所描述的结构对应于现有技术中已知的常规飞轮。
根据本发明,设置有两个环形的阻尼环6,其彼此轴向地布置并且将轮辐3包围在它们之间,更确切地说是包围该轮辐3的外端。阻尼环6借助于螺钉7相互拧紧。
通过调节螺钉7,可以调节阻尼环6和轮辐3之间,特别是和该轮辐3的支撑元件5之间的夹紧力。
居中地在轮辐3的各端部之间,在阻尼环6之间布置有吸振器质量元件8,并通过螺钉9将其固定在阻尼环6上。吸振器质量元件8与阻尼环6协同形成减振装置。吸振器质量元件8设计为圆柱形的束体,并且由螺钉9通过多个螺钉连接固定在阻尼环6上。
另外,直接在吸振器质量元件8的附近,设置有用作定心装置的定心辊10,该定心辊通过螺钉11在上方和下方分别固定在阻尼环6上。定心辊10在飞轮环4的内圆周12上运行,并用于使两个阻尼环6和由该阻尼环支撑的吸振器质量元件8定心。在此应注意的是,吸振器质量元件8带来了相当大的重量,该重量在飞轮旋转时可以引起相应的离心力。由阻尼环6和吸振器质量元件8组成的减振装置可以通过相应的定心辊10可靠地定心并稳定。
相比于其他部件,阻尼环6制得非常薄,因此具有较高的弹性变形能力及较低的刚性。在阻尼环6接触轮辐3的端部的区域中,加强元件13分别安装在阻尼环6的外侧上。加强元件13可以与相应的阻尼环6一体地制成。但它们也可以例如通过粘合工艺或焊接工艺安装到阻尼环6上。
加强元件13用于在相应的区域中加固阻尼环6。
因此,阻尼环6在圆周上具有刚性增强及弹性变形能力较低的区域(在轮辐3的端部或在螺钉7的拧紧点的区域),以及具有弹性变形能力提高(刚性较低)的区域,即固定有吸振器质量元件8的区域。
当火箭发射时,飞轮环4受到所作用的振动激励而沿轴向(X方向)往复地轴向振动。
这时,由于阻尼环6的低刚度以及其较高的弹性变形能力,吸振器质量元件8自身能够在相反的方向上轴向地来回振动,从而以这种方式产生了与飞轮环4的振荡运动相反的振荡运动。通过叠加振荡运动,可以整体上显著减轻或很大程度上消除过度共振。由此,处于共振中的飞轮(特别是对于轴承装置)的有害影响可以大大降低。
图5以另一局部截面图示出了到目前为止所描述的结构,其中,该截面沿阻尼环6在圆周方向上延伸。在此,仅两个轮辐3被截,而其他元件显示为未被截。
由该图可以清楚地看出,在固定轮辐3的区域中强化了阻尼环6,并因此比固定吸振器质量元件8的区域更加刚性。
在到目前为止所描述的实施方案中,阻尼环6固定地与支撑它们的轮辐3相连接,该阻尼环浮动地安装在轮辐3上。因为阻尼环6通过螺钉7彼此连接,因此该阻尼环压靠在轮辐3上并夹紧轮辐3。因此,在飞轮环4轴向共振的情况下,可以产生阻尼环6和轮辐支撑面之间的相对运动。
在一个变型中具有可实现的可选补充减振装置,其中,可以有针对性地在阻尼环6在轮辐3上的接触面内允许轻微的相对运动,从而允许摩擦,以获得进一步的减振效果。
为此目的,在接触面上插入相应的摩擦垫14,其特别是在图2和图4中可见。在图5的型式中,没有摩擦垫14。
因此,作为吸振器质量装置的补充,可以可选地设置摩擦垫14。
在图2和图4中可以看出,摩擦垫14可以具有U形的横截面,因此侧向地包围设置在轮辐3的末端上的支撑元件5。由此确保了摩擦垫14在轮辐3的端部处保持位置固定。
在低振动激励的情况下,作用在阻尼环6和存在于接触面内的摩擦垫14之间的夹紧力确保阻尼环6牢固地与飞轮质量(特别是飞轮环4)的运动相耦合,并且确保所有运动都传递到飞轮环4。在摩擦垫14和阻尼环6之间就存在静摩擦。
当飞轮质量的主模式之一被激励时,飞轮环4相对于轮毂1振动。该简正模是临界情况,其振幅必须在共振情况下保持尽可能小。一旦振动幅度变大以至于在接触阻尼环6的接触面中超过了静摩擦,阻尼环6就会相对于轮辐3或飞轮环4或摩擦垫14滑动。由此产生了两个具有不同共振频率的系统,它们彼此相对运动。
在此,该相对运动可以非常小,例如小于1mm。已经发现,在0.2-0.3mm(振动幅度)之间的相对运动就足以借助于摩擦垫14实现有效的振动阻尼。
图6以放大的细节截面图示出了作用方式。
在此,截面图中所示的轮辐3的径向侧端部分与飞轮环4连接成一体。摩擦垫14分别插入阻尼环6之间。
如果在共振情况下或在相应的振动激励的情况下,飞轮环4在轴向X上振动,则在克服了阻尼环6和摩擦垫14之间的静摩擦之后,在径向R上产生了相对运动。
图7补充示出了放大的细节图示,其具有保持在两个阻尼环6之间的吸振器质量元件8。