具有嵌套式皮带轮的变速传动装置
文献发布时间:2023-06-19 09:23:00
相关申请的交叉引用
本申请要求于2018年5月21日提交的美国临时专利申请No.62/674,278的优先权,其通过引用的方式并入本文。
背景技术
除非本文另有说明,否则这部分中所描述的材料不是本申请权利要求的现有技术并且不会由于包含在这部分中而被认为是现有技术。
包括传动装置作为各种机构的一部分以便在输入转矩和输出转矩之间提供机械效益。因此,可以包括传动装置以使电机、发动机、涡轮机或其他转矩产生器的特性(例如,转矩-速度曲线、效率曲线)与受动器、车轮、发电机或产生的转矩的一些其他预期应用的特性相匹配。例如,传动装置可以设置在汽车中以使由内燃机产生的高转速和相对较低的转矩与用于驱动汽车车轮的较低速度和较高转矩要求相匹配。在另一个示例中,可以设置传动装置以将内燃机连接到发电机,使得内燃机和发电机都根据各自的有效转速等进行操作。
传动装置可以具有设定的传动比(传动装置输入端的转速和/或施加的转矩与传动装置输出端的转速和/或传递的转矩之比)或传动装置可以具有可控传动比。这种传动装置的传动比可以经由电子的、机械的、液压的和/或其他方式(例如,经由通过电机、电磁阀或其他方式致动离合器、可滑动齿轮、拼合皮带轮、鼓、涡轮叶片、液压阀或传动装置的其他元件等)而是可控的。在一些示例中,传动装置可以具有离散数量的可选择的传动比(或“齿轮”),其可以通过操作一个或多个离合器或其他致动器来选择。在其他示例中,传动装置可以具有在传动比范围内连续可控的传动比;这种传动装置可以称为“无级变速传动装置(无级变速传动装置)”。这种变速传动装置可以包括拼合皮带轮、环形鼓、静液压元件或其他可致动部件以允许在传动比范围内连续控制传动比。
差速器是允许在多个不同的输出端分配所施加的转矩和/或旋转和/或将多个不同的施加的转矩和/或旋转的组合分配到单个输出端的装置。差速器可以以各种方式配置以在差速器的输入端和输出端之间提供转矩/旋转的特定分配。例如,汽车中的差速器可以从汽车的发动机接收输入转矩并且将该输入转矩均等地分配给汽车的两个车轮(例如,两个前轮或两个后轮),使得即使在转弯过程中相对的车轮可能经历不相等的旋转,当汽车转弯时两个车轮也都向地面提供相等的力。
发明内容
变速传动装置可以包括经由皮带连接的多个拼合皮带轮。通过控制拼合皮带轮的半皮带轮之间的轴向距离,可以调节皮带与拼合皮带轮接合的有效直径,从而改变传动装置的整体传动比。为了减小传动装置的尺寸、提供包括正向比和反向比的一系列传动比或提供其他益处,可以将拼合皮带轮(‘内拼合皮带轮’)中的一个嵌套在其他拼合皮带轮(‘外拼合皮带轮’)中。在这种配置中,这种传动装置中的内皮带轮通常参与传动装置内的余摆线运动(trochoidal motion),绕着本身围绕传动装置的中央旋转轴进行轨道运动的旋转轴在距中央旋转轴特定距离处旋转。这种传动装置的内拼合皮带轮可以由输入构件(例如,经由偏心凸轮)驱动,并且可以经由偏置联轴器或一些其他机构从内拼合皮带轮提取功率。
然而,在高速下,这种嵌套式拼合皮带轮传动装置由于内拼合皮带轮的偏心性质而可能会表现出振动、通过传动装置的轴承传递的大的不平衡力或者其他不希望的影响。为了减少这些问题,嵌套式拼合皮带轮传动装置可以包括多个内拼合皮带轮。内拼合皮带轮可以围绕传动装置的中央旋转轴以规则的间隔布置,以平衡通过传动装置的皮带施加在内拼合皮带轮上的力或提供其他益处。这种传动装置可以包括两个、三个或多个内拼合皮带轮。可以经由行星齿轮组将旋转耦合到这种传动装置中以及从这种传动装置中传出,其中行星齿轮连接到传动装置的各个内拼合皮带轮。
有多种方法和机构可用于促进这种平衡嵌套式拼合皮带轮传动装置的传动比的控制和调节。在一些示例中,这种机构可以包括差速器。这种差速器可以允许两个输入端通过输入端之间的差动旋转/转矩来实现换挡并且经由输入端的共同旋转/转矩实现传动装置的驱动。使用这种差速器可以提供许多益处,包括能够使传动装置的驱动和实现换挡所必需的致动器的数量最小化、能够施加两个驱动电机的转矩和/或额定功率以实现传动比改变(例如,以更快地实现换挡)、能够使用来自传动装置的输出端的能量来辅助改变传动比、当致动器功率没有被应用于实现传动比改变时能够将这样的功率应用于驱动传动装置的输出端等。
本公开的一些实施例提供了一种为了实现尺寸减小、重量减轻、成本降低或效率提高中的至少一项的具有减小的体积和可控传动比的传动装置,所述传动装置包括:(i)外锥形拼合皮带轮,所述外锥形拼合皮带轮具有第一半皮带轮和第二半皮带轮;(ii)两个或多个内锥形拼合皮带轮,每个内锥形拼合皮带轮具有相应的第一半皮带轮和第二半皮带轮;(iii)皮带,其中所述皮带与所述外锥形拼合皮带轮以及所述内锥形拼合皮带轮中的至少一个接触;(iv)第一输入构件;和(v)第一输出构件,所述第一输出构件经由所述两个或多个内锥形拼合皮带轮中的至少一个连接到所述第一输入构件,使得能够在所述第一输入构件和所述第一输出构件之间传递转矩。
本公开的一些实施例提供了一种为了实现尺寸减小、重量减轻、成本降低或效率提高中的至少一项的具有减小的体积和可控传动比的传动装置,所述传动装置包括:(i)外锥形拼合皮带轮,所述外锥形拼合皮带轮具有第一半皮带轮和第二半皮带轮,其中所述外锥形拼合皮带轮连接到机械地面,从而防止所述外锥形拼合皮带轮的所述第一半皮带轮和所述第二半皮带轮旋转;(ii)两个或多个内锥形拼合皮带轮,每个内锥形拼合皮带轮具有相应的第一半皮带轮和第二半皮带轮;(iii)两个或多个行星齿轮,其中所述两个或多个行星齿轮中的每个行星齿轮连接到所述两个或多个内拼合皮带轮中的相应的内拼合皮带轮;(iv)皮带,其中所述皮带与所述外锥形拼合皮带轮以及所述内锥形拼合皮带轮中的至少一个接触;(v)第一输入构件;(vi)第一输出构件;(vii)恒星齿轮,所述恒星齿轮连接到所述第一输入构件;和(viii)环形齿轮,所述环形齿轮与所述恒星齿轮同轴并连接到所述第一输出构件,其中所述环形齿轮连接到所述两个或多个行星齿轮,并且所述恒星齿轮连接到所述两个或多个行星齿轮,使得所述恒星齿轮的转矩导致所述第一输出构件的转矩的实现。
适当参照附图,通过阅读以下具体实施方式,对于本领域普通技术人员来说,这些以及其他方面、优点和替代方案将变得明显。需要注意的是,当在本文中用来标识传动装置的皮带轮时,词语‘内’和‘外’被用来帮助对传动装置的元件的识别,并且旨在具有比其普通含义更广泛的含义。‘内’皮带轮(例如,相对于其各自的外周)不必完全包含在‘外’皮带轮内。‘内’皮带轮不需要比‘外’皮带轮更封闭。事实上,如本文描述的传动装置的‘内’和‘外’皮带轮的直径和相对重叠度可以是相同的。如本文描述的传动装置的‘内’皮带轮可以延伸超过传动装置的‘外’皮带轮的外周。
附图说明
图1A是示例变速传动装置的侧视图。
图1B是图1A所示的变速传动装置的俯视图。
图1C是图1A所示的变速传动装置经历过传动比的改变之后的俯视图。
图1D是图1C所示的变速传动装置的俯视图。
图2是示例变速传动装置的立体剖视图。
图3A是示例变速传动装置的剖视图。
图3B是图3A所示的变速传动装置的另一剖视图。
图3C是图3A所示的变速传动装置在传动装置的传动比改变之后的剖视图。
图3D是图3C所示的变速传动装置的另一剖视图。
图4是示例变速传动装置的剖视图。
图5是变速传动装置的示例换挡机构的剖视图。
图6是图5所示的示例换挡机构的元件的示意图。
图7是变速传动装置的示例换挡机构的剖视图。
图8是示例变速传动装置的剖视图。
图9是变速传动装置的示例换挡机构的剖视图。
图10是变速传动装置的示例换挡机构的剖视图。
图11是变速传动装置的示例换挡机构的剖视图。
图12是变速传动装置的示例换挡机构的剖视图。
具体实施方式
在下面详细描述中,参考形成本文的一部分的附图。在附图中,除非上下文另有规定,否则类似的符号通常标识类似的部件。在具体实施方式、附图和权利要求书中描述的说明性实施例并不意味着是限制性的。在不脱离本文所提出的主题范围的情况下,可以使用其他实施例并且可以做出其他改变。容易理解的是,如本文一般描述的以及在附图中示出的本公开的各方面可以以各种不同的配置来布置、替换、组合、分离和设计,所有这些都明确设想在本文中。
Ⅰ.示例变速传动装置
机械传动装置在输入端和输出端之间提供连接,其特征在于传动比。该传动比表征传动装置输入端的转速和转矩与传动装置输出端的转速和转矩之间的关系。因此,可以设置传动装置来修改由电机(或其他转矩产生装置)提供的旋转的速度/转矩,以控制致动器或机器人元件的整体阻抗,从而通过允许电机以更有效的速度/转矩运转来提高装置的效率,或提供一些其他益处。例如,将传动装置设置在汽车中以将内燃机的高速、相对较低的转矩输出转换成较低的速度、较高的转矩输出以驱动汽车的车轮。在另一个应用中,具有高传动比的传动装置可以设置在机器人臂中以允许非常高的速度、低转矩的电机在机器人的关节处提供非常高的转矩。相对于使用没有传动装置的高转矩电机,与传动装置组合的这种高速、低转矩电机可以提供包括更高的效率、较低的整体质量、较低的成本或其他益处的益处。
在各种应用中,可能需要在运行期间调节传动装置的传动比。例如,可以控制该传动比以适应于传动装置的输出端提供的转矩和/或转速的变化(例如,随着汽车的速度的增大),以将驱动电机保持在有效运转状态(例如,电机的高速、低转矩)内,以适应于电机/传动装置组合的有效阻抗(例如,当人与机器人互动时,提供附加的安全性),或提供一些其他益处。为了使传动装置的传动比可控,传动装置可以包括离合器、线性致动器、多个不同的齿轮系/行星齿轮组或可以电动、机械和/或液压主动或被动操作以实现传动比的变化的其他元件。传动比的这种变化可以在许多不同的离散传动比之间。可选择地,传动装置可以是配置成允许在连续的传动比值范围内调节传动比的无级变速传动装置。
无级变速传动装置可以提供许多益处。例如,可以将传动比控制为可能的传动比范围内的任意值,而不是由非无级变速传动装置提供的离散传动比组中最接近的值。因此,无级变速传动装置允许将传动比控制为最佳比,使得可以根据宽范围的输出速度/转矩内的高效速度/转矩操作驱动电机。无级变速传动装置可以提供其他益处。
传动装置可以以各种方式配置,以实现在传动比值范围内连续控制传动比。在一些实施例中,这可以通过控制传动装置内一个或多个皮带轮的有效直径来实现。通过控制皮带轮的有效直径,可以控制该皮带轮相对于传动装置内的其他元件(例如,其他皮带轮)的旋转比,并且因此可以控制传动装置的传动比。
在一些示例中,皮带轮可以是具有两个半皮带轮的拼合皮带轮。半皮带轮具有共同的旋转轴并且各个半皮带轮具有与皮带接触的相对的锥形(或其他形状)的支承表面。因此,该皮带(例如,具有V形横截面的皮带)可以驱动拼合皮带轮,或由拼合皮带轮驱动。拼合皮带轮的有效直径与皮带接触半皮带轮的半径有关。因此,拼合皮带轮的有效直径可以通过改变半皮带轮之间的轴向距离进行调节。通过增大轴向距离,皮带将与离拼合皮带轮的轴较近的半皮带轮的支承表面接触,导致有效直径减小。相反,可以减小轴向距离,使得皮带将与离拼合皮带轮的轴较远的半皮带轮的支承表面接触,导致有效直径增大。皮带可以与另一个皮带轮(例如,另一个拼合皮带轮)接触以响应于施加在输入端(例如,连接到第一拼合皮带轮)的转矩/旋转来促进输出端(例如,连接到附加的皮带轮)的转矩/旋转的实现。这种传动装置的传动比可以与皮带轮相对于它们与皮带的相互作用的有效直径之间的比有关。通过调节两个皮带轮的有效直径、通过具有张紧轮或通过其他方式可以保持皮带的张力。
在图1A-图1D中通过示例的方式示出了拼合皮带轮的相关方面。图1A示出了第一时段内变速传动装置100的侧视图;图1B示出了第一时段内传动装置的俯视图。传动装置100包括具有两个半皮带轮的第一拼合皮带轮110a、具有两个半皮带轮的第二拼合皮带轮110b和与拼合皮带轮110a、110b两者都接触的V型皮带120。如图1B中示出的,第一拼合皮带轮110a的两个半皮带轮之间的轴向距离是d
在这个示例中,可以通过控制第一拼合皮带轮110a的半皮带轮之间的轴向距离来控制第一拼合皮带轮110a的有效直径,并且可以通过控制第二拼合皮带轮110b的半皮带轮之间的轴向距离来控制第二拼合皮带轮110b的有效直径。在示出了第二时段内变速传动装置100的侧视图的图1C和示出了第二时段内变速传动装置100的俯视图的图1D中示出了改变这些有效直径的结果(相对于图1A和图1B)。如图1D中示出的,第一拼合皮带轮110a的半皮带轮之间的轴向距离已经从d
拼合皮带轮(例如,110a)的半皮带轮之间的轴向距离的控制可以通过多种机构以各种方式实现,下面对其示例进行了描述。因此,可以控制第一拼合皮带轮110a的有效直径和/或第二拼合皮带轮110b的有效直径,从而控制传动装置100的传动比。随着第一拼合皮带轮110a的有效直径改变,使用惰轮、通过改变第二拼合皮带轮110b的有效直径和/或通过改变拼合皮带轮110a、110b之间的轴到轴距离可以保持皮带120的张力。这可以以各种方式(例如,通过利用致动器来独立控制第二拼合皮带轮110b的半皮带轮之间的轴向距离、通过使用将两个拼合皮带轮110a、110b的轴向距离耦合在一起的机构使得控制一个轴向距离实现另一个轴向距离的控制、通过使用包括弹簧或其他弹性元件的被动机构)来实现。如图1B中示出的,第二拼合皮带轮110b的半皮带轮经由弹性元件130(例如,连接在半皮带轮上的止推轴承和传动装置100的机械地面之间的弹簧)连接在一起,使得将轴向力施加在第二拼合皮带轮110b的半皮带轮之间。随着第一拼合皮带轮110a的有效直径改变,皮带120的张力的所得变化可能与由弹性元件130施加的轴向力相互作用,以实现第二拼合皮带轮110b的有效直径的相应的但是相反的变化。
图1A-图1D中所示的形成变速传动装置的拼合皮带轮的布置,旨在作为非限制性示例实施例。通过以其他方式配置这种传动装置的和/或连接到其上的元件中的拼合皮带轮、皮带、电机、换挡机构或其他元件,可以改进这种传动装置。例如,可以通过将拼合皮带轮中的一个嵌套在另一个拼合皮带轮中来提供改进的变速传动装置。即,皮带轮的外周之间发生一些重叠。这样的嵌套可以包括皮带轮中的一个(‘内’皮带轮)的旋转轴位于另一个皮带轮(‘外’皮带轮)的外周内,或者皮带轮中的一个整个地位于另一个皮带轮的外周内(‘完全嵌套’的布置)。在这种示例中,根据这种配置中“内’皮带轮和‘外’皮带轮的尺寸,‘内’皮带轮可以部分地延伸超过‘外’皮带轮的外周。这种配置可以提供多种益处。例如,通过将一个拼合皮带轮(‘内’拼合皮带轮)嵌套在另一个拼合皮带轮(‘外’拼合皮带轮)中,可以减小传动装置的整体尺寸。这在汽车和机器人应用中可以是有益的,其中,与汽车应用中使用的非嵌套式拼合皮带轮设计或机器人应用中使用的固定比行星齿轮、谐波或其他配置的传动装置相比,传动装置的体积和重量可以减小。此外,这种嵌套式设计可以使传动装置具有可控范围的传动比,其包括正向比和反向比以及空档(或‘非驱动输出’)配置。
在这种嵌套布置中,外皮带轮可以旋转地接地(即,可以防止外皮带轮的半皮带轮旋转),而内皮带轮可以经由凸轮由一个或多个输入端驱动,使得输入端的旋转引起内拼合皮带轮围绕输入端的旋转轴进行轨道运动(例如,以进行余摆线运动和旋转)。然后,输出构件可以连接到内拼合皮带轮(例如,通过笼形齿轮、恒星齿轮和/或环形齿轮、行星齿轮架、附加皮带或其他方式连接到内拼合皮带轮的一个或两个半皮带轮),以响应于输入构件的转矩/旋转的施加而允许输出构件的旋转/转矩的实现。这种传动装置可以提供各种益处,包括减小的尺寸、高传动比、可逆传动比、解开输入端与输出端的连接的空挡传动比或其他益处。
相对于非嵌套式拼合皮带轮CVT配置,这种传动装置也可以允许拼合皮带轮半部的轴向间隔发生更小的变化以实现传动装置的传动比的更大的变化。因此,嵌套式皮带轮配置可以允许提高传动比的换挡速度。这种提高的换挡速度可以提供许多益处,包括通过允许连续调节机器人关节的阻抗(并且因此连续调节机器人四肢的有效阻抗)以提高机器人对任何附近的人的安全性(例如,当与人接触时通过降低机器人四肢的阻抗)来提高机器人的安全性。
在一些示例中,这种传动装置可以配置成使得其可以控制成具有空挡或零传动比(即,输入端的旋转没有引起输出端的旋转)和/或具有负的传动比(即,传动装置的传动比是可控的,使得输出端相对于输入端的旋转方向是可逆的)。这种具有在包括0的传动比值的范围内可控的传动比的传动装置可以称为“无限度变速传动装置(infinitely variabletransmission)”。这种传动装置可以允许在没有离合器的情况下进行制动或反转传动装置输出端的方向,相对于例如在汽车和机器人应用中使用的提供反向齿轮传动的设计(其中可以设置多个传动装置/齿轮和伴随的离合器以允许在两个方向上高转矩和低速度运转),降低了传动装置的尺寸和成本。
在图2中示出了这种传动装置的示例。变速传动装置200包括具有第一半皮带轮230a和第二半皮带轮230b的第一拼合皮带轮。此外,传动装置200包括具有第三半皮带轮220a和第四半皮带轮220b的第二拼合皮带轮。第一拼合皮带轮和第二拼合皮带轮经由皮带240连接。第一拼合皮带轮嵌套在外拼合皮带轮内。这包括第一拼合皮带轮的旋转轴位于第二拼合皮带轮的外周内。输入构件210经由凸轮235和凸轮轴承237连接到第一拼合皮带轮。输入构件210和第一拼合皮带轮具有各自不同的、偏移的旋转轴。输入构件210的旋转引起第一拼合皮带轮的旋转轴关于输入构件210的旋转轴平移、半皮带轮230a、230b的旋转以及经由皮带240将转矩从第一拼合皮带轮传递到第二拼合皮带轮。因此,输入构件210的旋转可以引起第一拼合皮带轮的特定部分的摆线运动或一些其他的各种余摆线运动(例如,第一半皮带轮230a上的特定点的摆线运动或一些其他的各种余摆线运动)。
此外,传动装置200还包括输出构件250。传动装置200可以配置成通过使第二拼合皮带轮的半皮带轮220a、220b机械地接地以防止它们旋转并且通过将输出构件250连接到第一拼合皮带轮的半皮带轮230a、230b中的至少一个使得第一拼合皮带轮的旋转引起输出构件250的旋转,根据可控传动比,响应于输入构件210上施加的旋转和/或转矩来产生输出构件250的旋转和/或转矩。这可以包括将输出构件250配置为配置成与第一拼合皮带轮的半皮带轮220a、220b的相应元件(例如,多个形成的孔)连接的笼形齿轮。
需要注意的是,虽然本文描述的传动装置表征为包括功率从其传递到输出端的输入端,但是这些传动装置可以附加地或替代地配置成可反向驱动的或以其他方式配置成允许双向的能量传递和/或从输出端到输入端的能量传递。例如,本文描述的传动装置可以用来在机器人的关节之间双向传递能量,例如,以通过允许从一个关节(例如,当前从例如与地面接触接收能量的关节)收到能量并且向另一个关节(例如,当前用来在有效载荷上施加力的关节)施加能量,反之亦然,提高机器人的整体效率。此外,这种配置可以允许通过单个电机(例如,通过相应的嵌套式皮带轮无限度变速传动装置)驱动(例如,机器人的一个或多个关节的)多个自由度。
II.示例平衡变速传动装置
如上所述的具有单个内拼合皮带轮的嵌套式皮带轮传动装置可以提供各种益处。然而,单个内拼合皮带轮的使用可能会产生不良影响。例如,内拼合皮带轮的偏心质量会导致振动,尤其是在高速下,并且由此产生的时变力和转矩可能会对传动装置以及与传动装置连接的元件产生不良影响。这会导致磨损增加、使用寿命缩短、部件成本增加、噪声增加、效率降低或其他不良影响。在一些实施例中,可以通过添加配重以平衡内拼合皮带轮的偏心质量来完全或部分地减轻这种影响,此外,施加到偏心内拼合皮带轮的不平衡的力和/或转矩可能会导致大量载荷通过包括可能需要高速运转的轴承的轴承传递。
为了解决这些问题,如本文描述的嵌套式拼合皮带轮传动装置可以包括以平衡配置布置的多个内拼合皮带轮。例如,这种传动装置可以包括在传动装置内彼此相对布置的两个内拼合皮带轮,使得当传动装置运行时,内拼合皮带轮的质量被平衡。因此,该传动装置配置可以减少振动。相应地,这种传动装置可以以更高的速度、更高的效率运行,可以包括更少和/或更便宜的轴承,或者以其他方式提供改进的特性。
这种平衡拼合皮带轮传动装置还可以表现出通过传动装置的轴承传递的减小的载荷力。这是因为施加在内拼合皮带轮上的力(例如,从外拼合皮带轮经由皮带传递)可以完全或部分平衡。因此,这样的力(例如,在内拼合皮带轮中的一个与外拼合皮带轮之间的力)不需要通过经由传动装置的轴承施加的力来平衡。结果,可以减小这种轴承的尺寸、重量、数量和/或成本,和/或可以以更高的速度和/或转矩来运行传动装置。此外,可以减小用于耦合这种平衡力的传动装置的外壳的元件的强度、尺寸、质量和/或成本。
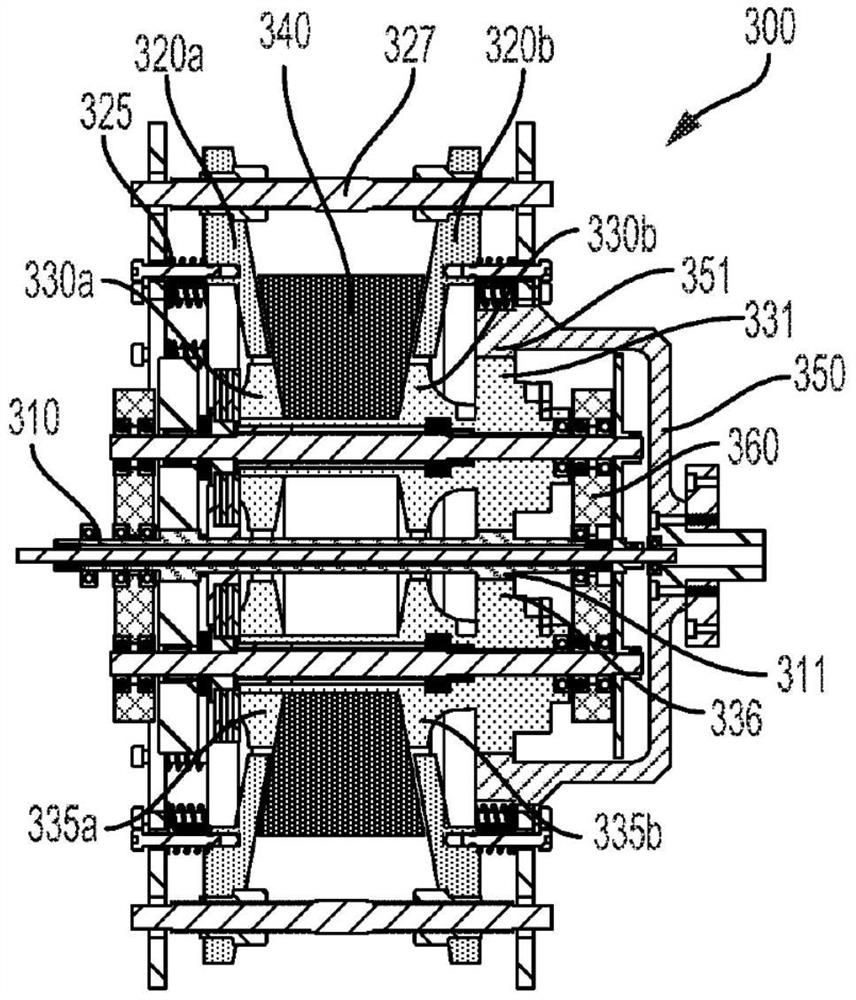
图3A-图3D示出了示例平衡嵌套式拼合皮带轮传动装置300,其具有两个内拼合皮带轮330、335以及外拼合皮带轮320。图3A和图3C示出了根据第一剖视图的传动装置300,而图3B和图3D示出了根据垂直于图3A和图3C的剖视图的剖视图的传动装置300的简化示意图。图3A和图3B示出了当传动装置300处于第一配置从而表现出第一传动比(例如,反向传动比)时的传动装置300。图3C和图3D示出了当传动装置300处于第二配置从而表现出不同于第一传动比的第二传动比(例如,正向传动比)时的传动装置300。
外拼合皮带轮330包括与皮带340接触的第一半皮带轮320a和第二半皮带轮320b。第一内拼合皮带轮330包括与皮带340接触的第一半皮带轮330a和第二半皮带轮330b,并且第二内拼合皮带轮335包括也与皮带340接触的第一半皮带轮335a和第二半皮带轮335b。输入构件310可以通过经由内拼合皮带轮330、335和传动装置300的其他元件通过传动装置300的转矩的传递来驱动输出构件350。输入构件310连接(例如,熔合)到恒星齿轮311,该恒星齿轮与分别连接到第一内拼合皮带轮330和第二内拼合皮带轮335的第一行星齿轮331和第二行星齿轮336啮合接触。第一齿轮331和第二齿轮336还与连接到输出构件350的环形齿轮351啮合接触。内拼合皮带轮330、335的相对位置部分地由行星齿轮架360保持。
如图所示,传动装置300配置成通过在恒星齿轮311和行星齿轮330、335之间以及在行星齿轮330、335和环形齿轮351之间传递转矩,响应于输入构件310上施加的转矩/旋转来实现输出构件350的转矩/旋转。输出构件的转矩的实现是通过在机械接地的外拼合皮带轮320和内拼合皮带轮330、335之间经由皮带传递的转矩引起的。传动装置300可以配置为可反向驱动的,使得响应于输出构件350上施加的转矩/旋转,可以实现输入构件310的转矩/旋转。
需要注意的是,图3所示的平衡嵌套式拼合皮带轮传动装置的配置旨在作为平衡嵌套式拼合皮带轮传动装置的非限制性示例。根据应用,输入构件和输出构件可以可选择地连接到传动装置300的恒星齿轮、行星齿轮架、环形齿轮、输出拼合皮带轮和/或其他元件,其中适当的互补元件旋转接地。例如,可以使环形齿轮351接地并且可以允许外拼合皮带轮320旋转。在这种示例中,输出构件可以连接到外拼合皮带轮320,并且由于因传动装置300的运行而施加在输入构件310上的旋转和/或转矩,因此可以实现外拼合皮带轮330的旋转和/或转矩。可以选择平衡嵌套式拼合皮带轮传动装置的这种替代配置,以设置可用于传动装置的传动比的范围、减少零件数量或以其他方式降低传动装置的成本、简化传动装置的组装、使传动装置的体积或尺寸与应用相匹配或提供其他一些益处。
输入构件310和输出构件350之间的传动装置300的整体传动比与多种因素有关,包括恒星齿轮311和行星齿轮331、336之间的齿轮比、行星齿轮331、336和环形齿轮351之间的齿轮比以及外拼合皮带轮320与内拼合皮带轮330、335的‘有效直径’之间的比率。外拼合皮带轮320和内拼合皮带轮330、335中的一个的‘有效直径’是皮带340(例如,中心线、柔性且基本不可延伸的材料的中心带穿过皮带的线或一些其他弯曲线或曲线)与拼合皮带轮的半皮带轮接触的皮带轮的直径。
当皮带340处于张紧状态时,特定拼合皮带轮相对于其与皮带340的相互作用的有效直径将与该特定拼合皮带轮的半皮带轮之间的轴向距离有关。这由示出了第一内拼合皮带轮330和第二内拼合皮带轮335以及外拼合皮带轮320的图3B和图3D示出。图3B示出了在当传动装置表现出第一传动比的第一时段内,内拼合皮带轮的有效直径332a、337a和外拼合皮带轮的有效直径322a。处于张紧状态的皮带340沿着它们各自的有效直径顺应内拼合皮带轮330、335和外拼合皮带轮320,以提供第一时段内的第一传动比(例如,反向传动比)。图3D示出了在当传动装置表现出第二传动比的第二时段内,内拼合皮带轮的有效直径332b、337b和外拼合皮带轮的有效直径322b。相对于图3B,内拼合皮带轮的有效直径已增加,而外拼合皮带轮的有效直径已减小。处于张紧状态的皮带340沿着它们各自的有效直径顺应内拼合皮带轮330、335和外拼合皮带轮320,以提供不同于第一时段内的传动比的第二时段内的第二传动比(例如,正向传动比)。
可以调节外拼合皮带轮和内拼合皮带轮的各个半皮带轮之间的轴向距离,以控制拼合皮带轮320、330、335与皮带340接触的直径。因此,可以在传动比范围内控制传动装置300的整体传动比。例如,外拼合皮带轮的有效直径由皮带340中的张力、连接在外拼合皮带轮的半皮带轮320a、320b之间的任选弹簧325(或其他弹性元件)的强度以及与外拼合皮带轮的半皮带轮320a、320b的螺纹啮合的不同螺距(例如,螺纹和反向螺纹)的导螺杆(例如,327)的设定的组合来确定。因此,可以通过旋转导螺杆327以调节外拼合皮带轮的半皮带轮320a、320b之间的轴向距离来控制外拼合皮带轮的有效直径。需要注意的是,如本文描述的拼合皮带轮的半皮带轮之间的轴向距离可以仅通过主动装置(例如,导螺杆327)、仅通过被动装置(例如,弹簧325)或通过主动装置和被动装置的组合来控制。附加地或替代地,这样的方法可以用于控制内拼合皮带轮的有效直径。附加地或替代地,可以使用在拼合皮带轮的半皮带轮之间提供被动弹力和/或主动定位力的其他方法。
传动比的范围可以包括正传动比和负传动比(即,正向和反向传动比),并且可以包括一个或多个“空挡”传动比,在该传动比处,没有响应于输入构件310上施加的转矩/旋转而实现输出构件350的转矩/旋转。可以使用多种机制来控制外拼合皮带轮的各个半皮带轮之间和/或内拼合皮带轮的各个半皮带轮之间的轴向距离。
在传动装置300的运行期间,内拼合皮带轮330、335围绕各自的旋转轴旋转。内拼合皮带轮330、335设置在传动装置300内(例如,旋转地连接到一个或多个行星齿轮架360),使得内拼合皮带轮330、335的旋转轴围绕传动装置300的中央旋转轴并且距中央旋转轴特定距离d规则地设置(即,相隔180°设置)。恒星齿轮311和环形齿轮351也围绕中央旋转轴旋转。以这种方式,两个内拼合皮带轮330、335围绕中央旋转轴设置,以便基本平衡皮带340可能施加到内拼合皮带轮330、335上的任何反作用力,并平衡内合拼皮带轮330、335的质量,从而减少当传动装置300运行时可能发生的振动。
需要注意的是,如本文描述的平衡嵌套式拼合皮带轮传动装置可以包括两个以上的内拼合皮带轮。根据应用,这种传动装置可以包括三个、四个或多个内拼合皮带轮。这种传动装置的内拼合皮带轮可以围绕中央旋转轴规则地分布。图4示出了传动装置400的元件的剖视图,该传动装置包括外拼合皮带轮420、三个内拼合皮带轮430、434、436和与各个拼合皮带轮接触的皮带440。可以调节外拼合皮带轮420和内拼合皮带轮430、434、436的半皮带轮之间的轴向距离,以控制皮带440与拼合皮带轮接触的相应的有效直径422、431、435、437,由此控制传动装置400的传动比。
如图所示,如本文描述的平衡嵌套式拼合皮带轮传动装置的两个、三个或多个内拼合皮带轮可以围绕中央旋转轴规则地布置,以减少振动、平衡施加到内拼合皮带轮上的力或提供一些其他益处。例如,两个内皮带轮传动装置可以使内皮带轮相隔180度,三个内皮带轮传动装置可以使内皮带轮相隔120度,四个内皮带轮传动装置可以使内皮带轮相隔90度等。内拼合皮带轮围绕中央旋转轴“规则地”布置包括内拼合皮带轮的旋转轴围绕中央旋转轴以在数学规则性的10度以内的角度设置。例如,具有两个内拼合皮带轮的传动装置可以使内拼合皮带轮围绕中央旋转轴彼此间隔170度(或等效地,190度)地设置。在另一个示例中,具有四个内拼合皮带轮的传动装置可以使内拼合皮带轮围绕中央旋转轴以彼此间隔80度、90度、100度和90度的间隔设置。类似地,内拼合皮带轮的旋转轴与中央旋转轴之间的距离可能与均匀度相差指定量,例如,小于中央旋转轴与内拼合皮带轮的旋转轴之间的平均距离的15%。
可以形成与完美规则性和/或均匀性的这些微小偏差,以促进传动装置的制造和/或组装、考虑制造中的公差、允许将换挡机构放置在传动装置内或提供一些其他益处。这些益处的价值可能比振动、不平衡力或其他不良影响的轻微增加要高得多,振动、不平衡力或其他不良影响可能会随着在传动装置内稍微不规则地设置内拼合皮带轮而产生。在一些示例中,可以提供表现出与规则性和/或均匀性明显不同的传动装置,以便允许在传动装置内放置附加机构或提供一些其他益处。可以这样做,以获得这种不规则/不均匀配置的益处,其中,这种益处胜过该配置在减振、平衡施加到内拼合皮带轮上的力或由内皮带轮以完全规则且均匀的布置来设置所提供的其他益处方面相应降低的效果。这样的益处可以包括提供更大的转矩能力以及用于机械通过的空间或者超过完全平衡皮带轮布置的一些其他益处。
此外,需要注意的是,如本文描述的嵌套式皮带轮传动装置(例如,200、300)可以包括非拼合内皮带轮。这种传动装置可以具有固定的传动比。可选择地,这种传动装置的传动比是可调节的,例如,通过调节外拼合皮带轮的半皮带轮之间的轴向距离、通过调节内皮带轮的旋转轴与传动装置的中央旋转轴之间的距离、通过调节皮带中的张力和/或通过使用一些其他方法,以控制如本文描述的当内皮带轮为非拼合皮带轮时的传动装置的传动比。
III.示例差动换挡机构
可以通过控制传动装置的一个或多个拼合皮带轮的半皮带轮之间的轴向距离来控制拼合皮带轮变速传动装置的传动比。因此,传动装置的皮带将在不同位置处接触支承表面(例如,锥形拼合皮带轮的半皮带轮的锥形支承表面),导致拼合皮带轮的有效直径的变化和传动装置的传动比的变化。例如,这种支承表面可以配置为通过包括表面纹理或粗糙化处理、通过由指定的材料组成以增强牵引力和/或减少皮带的打滑或者通过以一些其他方式配置以增强皮带的牵引力来提供针对皮带的增强牵引力。在变速传动装置包括多个内拼合皮带轮(例如,两个、三个或多个内拼合皮带轮的平衡布置)的情况下,可以采用行星齿轮组或一些其他机构来共同控制各个内拼合皮带轮的半皮带轮之间的轴向距离。可选择地,可以仅控制内拼合皮带轮中的一个的轴向距离,而其他拼合皮带轮的轴向距离由弹簧或其他被动元件设置,以跟随受控的拼合皮带轮的轴向距离。
可以应用各种机构以实现半皮带轮之间的轴向距离的这种控制。在一些示例中,拼合皮带轮可以由两个(或更多个)输入端驱动,并且可以设置差速器以将来自两个输入端的转矩在施加功率以驱动传动装置的输出端和施加功率以实现传动装置的传动比的改变之间分配。例如,这种差速器可以配置成使得两个输入端之间的转矩差导致轴向力经由差速器施加在拼合皮带轮的第一半皮带轮和第二半皮带轮之间。因此,第一半皮带轮和第二半皮带轮之间的轴向距离可以增大或减小,能够改变拼合皮带轮的有效直径。通过促进轴向距离的这些改变的控制,差速器允许控制包括拼合皮带轮的传动装置的传动比。此外,差速器可以将来自输入端的净转矩施加到拼合皮带轮上,从而使得净转矩导致传动装置的输出端的输出转矩的实现(例如,由于经由皮带、附加的拼合皮带轮和/或其他元件传递转矩)。
这种差速器机构可以提供各种益处。例如,它可以允许两个高功率驱动电机应用于驱动传动装置的输出端并且应用于实现传动装置的传动比的改变。由于可能发生传动比改变的速率与为了实现换挡而施加的功率有关,因此使用两个大型的、高功率的电机可以允许非常快速的换挡。此外,当这些电机没有“差动地”操作以改变传动比时,可以将两个电机的全功率用于驱动输出端。因此,差速器配置允许快速的、可控的高功率换挡而不需要单独配给换挡用的大型的、高功率的电机(以及其伴随的尺寸、重量和成本)。此外,本文描述的差动换挡器实施例可以配置成可反向驱动的或以其他方式配置成允许从输出端接收的能量(例如,转矩)辅助实现传动比改变,从而进一步地提高传动装置的效率。
图3-图9示出了差动换挡器接收两个输入端的实施例,这两个输入端可以从差速器/拼合皮带轮沿相反方向延伸,或可以是同轴且同心的,其中一个输入端至少部分设置在另一个内部(例如,一个输入轴设置在另一个的中空中央内)。在其他实施例中,输入端不需要以这种方式嵌套。这些传动比改变机构可以应用于实现嵌套式皮带轮差速器(例如,图2的具有单个内拼合皮带轮的嵌套式皮带轮传动装置或者图3A-D的具有多个内拼合皮带轮的传动装置)的“内”或“外”拼合皮带轮或以一些其他方式配置的变速传动装置(例如,图1A-图1D的变速传动装置)的拼合皮带轮的轴向间隔变化。这些示出的实施例旨在作为非限制性示例;示出了嵌套式输入端的任何实施例经适当修改后,可以接收从差速器沿相反方向延伸的输入端,反之亦然。
进一步地,如本文描述的传动装置或其元件(例如,差速器)可以包括附加的或替代的元件以促进应用。例如,传动装置可以包括附加的齿轮装置,例如,以提供在不同的轴上的旋转、以提供齿轮减速、以在多个内拼合皮带轮之间分配差动力和/或改变力或提供一些其他机械效果。可以提供这些修改,例如,以控制差动转矩和施加的传动比改变力之间的关系、将来自两个输入端中的每一个的能量不对称地分配给传动比改变和/或输出驱动、控制对于一个或两个输入端的换挡和/或输出驱动的机械效益、将旋转运动转换成线性运动(例如,在锥形拼合皮带轮的半皮带轮之间施加轴向力)、共同控制多个拼合皮带轮的半皮带轮之间的轴向距离或根据应用提供一些其他益处。
A.
在一些示例中,可以设置行星差速器以便实现如本文描述的差动换挡器。然后行星差速器的行星齿轮可以连接到螺杆、齿销、线性齿轮或齿条或其他机械元件上,以便将行星齿轮的旋转(由于差速器的输入端的差动旋转产生的)耦合到拼合皮带轮的半皮带轮之间的轴向力/运动。在一些示例中,半皮带轮可以相互螺纹连接,并且行星齿轮的旋转可以耦合到两个半皮带轮之间的相对旋转,经由将半皮带轮连接到一起的螺纹实现半皮带轮之间的轴向距离的改变。
图5示出了示例拼合皮带轮500(例如,变速传动装置的拼合皮带轮)的剖视图,该拼合皮带轮包括连接到两个输入构件510a、510b和两个半皮带轮530a、530b的行星差速器550,使得第一输入构件510a和第二输入构件510b之间的转矩差导致轴向力经由差速器550施加在第一半皮带轮530a和第二半皮带轮530b之间,因此允许第一半皮带轮530a和第二半皮带轮530b之间的轴向距离(“d”)增大或减小。第一输入构件510a和第二输入构件510b是同轴且同心的,并且第一输入构件510a部分设置在第二输入构件510b内。图6示出了差速器550的另一个剖视图,图6中的视图与图5中提供的剖视图垂直。
差速器550包括恒星齿轮551a和环形齿轮551b。恒星齿轮551a和环形齿轮551b分别连接(例如,熔合)到第一输入构件510a和第二输入构件710b,使得输入构件的旋转引起恒星齿轮和环形齿轮中的相应一个的旋转。此外,差速器550包括与恒星齿轮551a和环形齿轮551b啮合的行星齿轮553a、553b、553c、553d,使得第一输入构件510a和第二输入构件510b之间的旋转差引起行星齿轮553a、553b、553c、553d相对于差速器550的行星齿轮架(未示出)旋转。
行星齿轮553a、553b、553c、553d中的一个或多个的旋转可以以各种方式耦合到半皮带轮530a、530b之间的轴向力/运动。如图所示,行星齿轮553a、553b连接(例如,熔合)到相应的螺杆555a、555b。螺杆555a、555b又经由相应的螺纹孔539a、539b连接到第一半皮带轮530a,使得行星齿轮553a、553b、553c、553d的旋转引起螺杆551、555b的旋转,从而能够改变半皮带轮530a、530b之间的轴向距离(“d”)。需要注意的是,图5中所示的螺纹孔(539a、539b)和本文中其他地方所示的螺纹孔旨在作为螺纹孔的非限制性示例,该螺纹孔可以用于与螺杆配合,以便控制传动装置的元件之间的轴向距离。这种螺纹孔可以一直延伸穿过形成有该螺纹孔的特定元件(如图5所示),或者该螺纹孔可以仅部分地延伸穿过特定元件(例如,螺纹孔可以通过搭接仅在传动装置的特定元件的中途钻出的盲孔来形成)。
由第一输入构件510a和第二输入构件510b提供的净转矩可以施加到半皮带轮530a、530b上,例如,以驱动变速传动装置的皮带并且因此驱动变速传动装置的输出端。这种净转矩可以经由差速器550的外壳、经由由螺杆555a、555b施加到半皮带轮上的力或经由拼合皮带轮500的一些其他元件从输入端耦合到半皮带轮上。
需要注意的是,图5和图6中示出的实施例仅旨在作为非限制性示例。预见到可替代的实施例。例如,差速器550可以设置在半皮带轮530a、530b之间并且可以使附加的螺杆经由相应的螺纹孔从行星齿轮延伸以与第二半皮带轮530a的螺纹部分啮合。这可以使半皮带轮530a、530b的轴向运动能够相对于行星齿轮或差速器550的其他元件对称。可以指定恒星齿轮、环形齿轮和/或行星齿轮的直径和/或齿的数量以控制差动转矩和施加的传动比改变力之间的关系、将来自两个输入端中的每一个的能量不对称地分配给传动比改变和/或输出驱动、控制对于一个或两个输入端的换挡和/或输出驱动的机械效益或根据应用提供一些其他益处。示例半皮带轮530a、530b旋转地耦合到输入构件510a、510b的净旋转;然而,半皮带轮530a、530b可以经由相应的凸轮和凸轮轴承连接到输入构件510a、510b以响应于输入构件510a、510b的净旋转促进半皮带轮530a、530b的余摆线运动。在又一个示例中,图5和图6中示出的差动换挡机构可以适用于共同控制如本文描述的平衡传动装置的多个内拼合皮带轮的半皮带轮之间的轴向距离。
B.
各种换挡机构可以适用于共同控制如本文描述的嵌套式皮带轮传动装置的多个内拼合皮带轮的有效直径。这可以包括使单个内拼合皮带轮传动装置的换挡机构适用于控制多个内拼合皮带轮。例如,图5和图6中示出的用于控制单个拼合皮带轮的半皮带轮之间的轴向距离的差速器机构可以适用于控制多个拼合皮带轮的半皮带轮之间的轴向距离。
作为示例,图7示出了传动装置700的剖视图,该传动装置包括具有第一半皮带轮720a和第二半皮带轮720b的外拼合皮带轮、具有第一半皮带轮730a和第二半皮带轮730b的第一内拼合皮带轮以及具有第一半皮带轮735a和第二半皮带轮735b的第二内拼合皮带轮。内拼合皮带轮旋转地连接(例如,经由滚珠轴承)到行星齿轮架745。皮带740与外拼合皮带轮和内拼合皮带轮接触。第一内拼合皮带轮和第二内拼合皮带轮的第一半皮带轮730a、730b连接(例如,熔合,由单种材料形成等)到相应的第一行星齿轮731和第二行星齿轮736,该第一行星齿轮和第二行星齿轮与连接到输出构件760的环形齿轮761啮合接触。第一输入构件710a和第二输入构件710b经由相应的差速器连接到第一内拼合皮带轮和第二内拼合皮带轮,使得输入构件710a、710b可以被共同驱动,从而实现传动装置700的输出构件760的转矩。输入构件710a、710b可以被差动地驱动,以通过调节内拼合皮带轮的半皮带轮之间的轴向距离来实现传动装置700的传动比的变化。
差速器750连接到第一内拼合皮带轮以促进该控制。差速器750包括与螺旋齿轮753啮合接触的恒星齿轮755和环形齿轮751。螺旋齿轮753连接(例如,熔接)到与第一内拼合皮带轮的第二半皮带轮730b的螺纹733接触的螺杆732,使得螺杆732相对于第一内拼合皮带轮的旋转引起第一内拼合皮带轮的半皮带轮730a、730b之间的轴向距离的变化。这种旋转可以通过传动装置751的恒星齿轮755和环形齿轮751之间的相对旋转来实现。恒星齿轮755连接到环形齿轮756,该环形齿轮与连接到第一输入构件710a的恒星齿轮711a啮合接触。因此,第一输入构件710a的旋转可以引起恒星齿轮755的旋转。环形齿轮751连接到与另一个恒星齿轮711b啮合接触的另一个环形齿轮752,该另一个恒星齿轮连接到第二输入构件710b。因此,第二输入构件710b的旋转可以引起环形齿轮751的旋转。因此,第一输入构件710a和第二输入构件710b之间的差动旋转/转矩可以实现第一内拼合皮带轮的半皮带轮730a、730b之间的轴向距离的变化/之间的轴向力的施加。此外,第一输入构件710a和第二输入构件710b之间的净转矩可以导致输出构件760的转矩的实现。
C.
在一些示例中,如本文描述的传动装置的各内拼合皮带轮可以由第一输入构件和第二输入构件驱动,例如,经由连接到第一输入构件和第二输入构件的恒星齿轮来驱动。各内拼合皮带轮的半皮带轮可以由第一输入构件直接驱动,然而,各内拼合皮带轮的半皮带轮可以通过螺杆间接驱动,该螺杆经由螺纹与至少一个半皮带轮啮合。因此,输入构件之间的旋转和/或转矩的差异可能经由螺杆导致各个内拼合皮带轮的半皮带轮之间的轴向力和/或距离变化。经由输入构件共同施加的旋转和/或转矩可以通过传动装置经由拼合皮带轮进行传递。
图8示出了示例传动装置800的剖视图。传动装置800包括具有第一半皮带轮820a和第二半皮带轮820b的外拼合皮带轮、具有第一半皮带轮830a和第二半皮带轮830b的第一内拼合皮带轮以及具有第一半皮带轮835a和第二半皮带轮835b的第二内拼合皮带轮。内拼合皮带轮经由皮带840连接到外拼合皮带轮。第一螺杆880旋转地连接到第一拼合皮带轮的第二半皮带轮830b,并经由螺纹883连接到第一拼合皮带轮的第一半皮带轮830a。第二螺杆885旋转地连接到第二拼合皮带轮的第二半皮带轮835b,并经由螺纹888旋转地连接到第二拼合皮带轮的第一半皮带轮835a。第一拼合皮带轮的第二半皮带轮830b连接到第一齿轮831,并且第二拼合皮带轮的第二半皮带轮835b连接到第二齿轮836。第一螺杆880连接到第三齿轮881,并且第二螺杆885连接到第四齿轮886。
第一输入构件810a和第二输入构件810b连接到相应的第一恒星齿轮811a和第二恒星齿轮811b。第一恒星齿轮811a与第一齿轮831和第二齿轮836啮合接触,并且第二恒星齿轮811b与第三齿轮881和第四齿轮886啮合接触。这些元件形成差速器,使得第一输入构件811a和第二输入构件811b之间的转矩差导致轴向力经由差速器施加在第一内拼合皮带轮和第二内拼合皮带轮之间的半皮带轮上,从而允许内拼合皮带轮的第一半皮带轮和第二半皮带轮之间的轴向距离(“d”)增大或减小。第一输入构件810a和第二输入构件810b是同轴且同心的,并且第二输入构件810b部分设置在第一输入构件810a内。
传动装置800还包括环形齿轮851,该环形齿轮与第一齿轮831和第二齿轮836啮合接触并且连接到输出构件。外拼合皮带轮的半皮带轮820a、820b旋转地机械接地,使得当经由第一输入构件810a和第二输入构件810b施加净转矩时,转矩经由内拼合皮带轮传递到输出构件850。
E.
在一些示例中,可以设置包括相反旋向的螺纹部分(例如,螺母、螺纹孔、滚珠丝杠的螺纹)的差速器。然后螺纹部分可以与连接到差速器的输入端的相应的螺杆接触。因此,输入端的差动旋转可以使得轴向运动/力施加到与凸轮接触的半皮带轮上(随着一个螺杆旋入其相应的螺纹部分,另一个螺杆从其相应的螺纹部分旋出)。输入端的共同旋转将会引起凸轮和/或拼合皮带轮的旋转和/或将转矩施加到凸轮和/或拼合皮带轮上。螺纹部分可以彼此刚性地连接(例如,从相反的方向钻入形成在凸轮中的单个孔中)。可选择地,螺纹部分可以形成在凸轮的相应子部分(例如,“子凸轮”)中,允许螺纹部分之间的相对运动。这些子部分可以经由销或其他方式连接以允许子部分之间的相对轴向运动,但是防止子部分之间的相对旋转。这些凸轮、螺杆、螺纹部分和相关联的元件可以构成差速器,该差速器将在输入端之间的差动转矩应用于改变传动装置的传动比(经由凸轮的轴向运动)和将净转矩施加到传动装置的输出转矩。
图9示出了示例拼合皮带轮900(例如,变速传动装置的拼合皮带轮),该拼合皮带轮包括具有第一螺纹部分953a和第二螺纹部分953b(例如,相应的滚珠丝杠的螺纹)的凸轮955。螺纹部分953a、953b具有相反的旋向性。此外,传动装置900包括第一半皮带轮930a和第二半皮带轮930b。第二半皮带轮930b包括延伸到第一半皮带轮930a的相应的孔941中的销940。销940允许半皮带轮930a、930b相对于彼此轴向平移,但是防止半皮带轮930a、930b之间的相对旋转(并且因此可以用来将来自输入构件910a、910b的转矩传递给第二半皮带轮930b)。第一半皮带轮930a刚性地连接到凸轮955。两个输入构件910a、910b连接到相应的螺杆951a、951b,螺杆951a、951b本身与凸轮955的相应的螺纹部分953a、953b啮合,使得第一输入构件910a和第二输入构件910b之间的转矩差导致轴向力施加在凸轮955和第一半皮带轮930a之间。设置止推轴承960以允许第一螺杆951a和第二螺杆951b相互施加轴向力,从而实现在凸轮955和第一半皮带轮之间产生轴向力。这种轴向力因此可以允许第一半皮带轮930a和第二半皮带轮930b之间的轴向距离(“d”)增大或减小。第一输入构件910a和第二输入构件910b从半皮带轮930a、930b沿相反方向向外延伸。
由第一输入构件910a和第二输入构件910b提供的净转矩可以施加到半皮带轮930a、930b上,例如,以驱动变速传动装置的皮带并且因此驱动变速传动装置的输出端。这种净转矩可以经由凸轮955、经由销940和/或拼合皮带轮900的一些其他元件从输入端耦合到半皮带轮上。
需要注意的是,如图9中示出的凸轮955、螺杆951a、951b和半皮带轮930a、930b的布置旨在作为使用这种双螺纹凸轮以实现锥形(或以其他方式配置的)拼合皮带轮的第一半皮带轮和第二半皮带轮之间的轴向距离的控制的机构的非限制性示例。在另一个示例中,凸轮可以设置为第一和第二子凸轮,具有相应的第一和第二相反旋向的螺纹部分。子凸轮可以刚性连接到相应的半皮带轮930a、930b,并且经由销或其他方式彼此连接以允许子部分之间(以及半皮带轮之间)的相对轴向运动,但是防止子部分之间的相对旋转。
需要注意的是,图9中示出的实施例仅旨在作为非限制性示例。预见到可替代的实施例。示例半皮带轮930a、930b旋转地刚性连接到凸轮955(并且因此耦合到输入构件910a、910b的净旋转);然而,半皮带轮930a、930b可以经由相应的附加的凸轮和/或凸轮轴承连接到输入构件910a、910b和/或凸轮955,以响应于输入构件910a、910b的净旋转促进半皮带轮930a、930b的余摆线运动。附加地或替代地,半皮带轮930a、930b可以由围绕与半皮带轮930a、930b共同的轴旋转的输入构件驱动。可以指定螺杆951a、951b的螺距、导程、螺纹的数量和/或其他特性以控制差动转矩和施加的传动比改变力之间的关系、将来自两个输入端中的每一个的能量不对称地分配给传动比改变和/或输出驱动、控制对于一个或两个输入端的换挡和/或输出驱动的机械效益或根据应用提供一些其他益处。
在又一个示例中,图9中示出的差动换挡机构可以适用于共同控制如本文描述的平衡传动装置的多个内拼合皮带轮的半皮带轮之间的轴向距离(例如,使用类似于图7和/或图8中示出的机构)。例如,对于传动装置,第一输入构件910a和第二输入构件910b中的每一个可以连接到相应的行星差速器中的相应的行星齿轮,该行星差速器的相应的恒星齿轮、环形齿轮和/或行星齿轮架由相应的第一和第二整体输入构件驱动。
IV.附加的换挡机构
图5-图9中示出的和上面所描述的示例换挡机构包含配置为差速器的元件,以便从两个输入端之间的转矩差提供一个或多个锥形(或以其他方式配置的)拼合皮带轮的相对的半皮带轮之间的轴向定向改变力。然而,也预见到其他的非差速器机构允许快速、可控地改变拼合皮带轮变速传动装置的传动比。例如,可以设置连接到拼合皮带轮的第一输入端,使得经由第一输入端施加的转矩经由拼合皮带轮施加到传动装置的输出端(例如,经由V型皮带)。也设置第二输入端,经由第二输入端可以施加转矩以实现传动装置的换挡。在这种示例中,传动比的改变可以与两个输入端之间的相对旋转有关,并且与两个输入端之间的任何转矩差基本上无关。在这种示例中,第二输入端可以以与第一输入端相同的速率旋转,基本上不施加转矩,以将传动比保持在特定值。在这种示例中,可以主动驱动第二输入端以匹配第一输入端的速度。可选择地,第二输入端可以与用于驱动第二输入端的任何电机分离以便将传动比保持在特定值。在又一个实施例中,第二输入构件可以经由离合器连接到驱动电机(例如,连接到用于驱动第一输入构件的驱动电机),使得驱动电机可以在驱动电机经由离合器连接到第二输入构件时操作以实现传动比的改变。
图10示出了这种传动装置的拼合皮带轮1000的示例的剖视图。拼合皮带轮1000包括两个半皮带轮1030a、1030b和两个输入构件1010、1020。第一输入构件1010连接到半皮带轮1030a、1030b中的至少一个,使得施加到第一输入构件1010a上的转矩传递到第一半皮带轮1030a和第二半皮带轮1030b。第一半皮带轮1030a包括延伸到第二半皮带轮1030b的相应孔1041中的销1040。销1040允许半皮带轮1030a、1030b相对于彼此轴向平移,但是防止半皮带轮1030a、1030b之间的相对旋转(并且因此可以用来将来自第一输入构件1010的转矩传递给第二半皮带轮1030b)。
第二输入构件1020连接到螺杆1055。第一输入构件1010和第二输入构件1020是同轴且同心的,并且第二输入构件1020部分设置在第一输入构件1010内。因此,第一输入构件1010和第二输入构件1020之间的差动旋转可以引起螺杆1055的旋转。螺杆1055与第二半皮带轮1030b的螺纹部分1039啮合,使得第一输入构件1010和第二输入构件1020之间的差动旋转导致轴向力经由螺杆1055施加在第一半皮带轮1030a和第二半皮带轮1030b之间,因此允许第一半皮带轮1030a和第二半皮带轮1030b之间的轴向距离(“d”)增大或减小。
需要注意的是,图10中示出的实施例仅旨在作为非限制性示例。预见到可替代的实施例。例如,不同的机构(例如,齿条、线性齿轮、半皮带轮之间的螺纹连接)可以用于将第一输入构件1010和第二输入构件1020之间的差动旋转转换成半皮带轮1030a、1030b之间的轴向运动。可以包括多个螺杆,每个螺杆(例如,经由一个或多个齿轮)由第二输入构件驱动以将第二输入构件1020的旋转转换成半皮带轮之间的轴向力/运动。示例半皮带轮1030a、1030b旋转地刚性耦合到第一输入构件1010的旋转;然而,半皮带轮1030a、1030b可以经由相应的凸轮和凸轮轴承连接到第一输入构件1010以响应于第一输入构件1010的旋转促进半皮带轮1030a、1030b的余摆线运动。在又一个示例中,所示的拼合皮带轮1000的输入构件可以经由行星齿轮组或经由一些其他机构连接到用于驱动多个这样的拼合皮带轮的输入构件,该多个拼合皮带轮例如以本文中其他地方所述的平衡布置来布置,以便共同调节多个拼合皮带轮中的每一个的轴向距离。
在又一个示例中,图10中示出的换挡机构可以适用于共同控制如本文描述的平衡传动装置的多个内拼合皮带轮的半皮带轮之间的轴向距离。图11示出了这种传动装置1100的剖视图。传动装置1100包括具有第一半皮带轮1120a和第二半皮带轮1120b的外拼合皮带轮,第一半皮带轮1120a和第二半皮带轮1120b具有相应的支承表面1121a、1121b,外拼合皮带轮经由该支承表面与皮带1140接触。传动装置1100还包括两个内拼合皮带轮。第一内拼合皮带轮包括第一半皮带轮1130a和第二半皮带轮1130b,第一半皮带轮1130a和第二半皮带轮1130b具有相应的支承表面1132,第一内拼合皮带轮经由该支承表面与皮带1140接触。第二内拼合皮带轮包括第一半皮带轮1135a和第二半皮带轮1135b。每个内拼合皮带轮的半皮带轮彼此旋转地锁定(例如,经由匹配的销和凹部),这种施加到特定内拼合皮带轮的半皮带轮中的一个的驱动转矩(例如,经由熔合到半皮带轮的行星齿轮)也施加到特定内拼合皮带轮的另一个半皮带轮。第一内拼合皮带轮和第二内拼合皮带轮连接到与中央恒星齿轮1111和外环形齿轮1151啮合接触的相应的第一行星齿轮1131和第二行星齿轮1136,该外环形齿轮与恒星齿轮同轴。第一内拼合皮带轮和第二内拼合皮带轮通过行星齿轮架(未示出)或经由一些其他方式(例如,经由由恒星齿轮1111和环形齿轮1151施加的力)以相对平衡的布置保持在传动装置1100内。
传动装置1100具有连接到恒星齿轮的第一输入构件1110和连接到环形齿轮1151的输出构件1150。外拼合皮带轮的半皮带轮1120a、1120b机械接地以防止旋转。因此,可以根据传动比经由内拼合皮带轮在第一输入构件1110和输出构件1150之间传递旋转和/或转矩,该传动比可以通过调节外拼合皮带轮和内拼合皮带轮的半皮带轮之间的轴向距离来控制。需要注意的是,该配置旨在作为非限制性示例实施例;可选择地,传动装置1100可以具有连接到恒星齿轮1111、环形齿轮1151、行星齿轮架(未示出)和/或外拼合皮带轮1120a、1120b的输入构件和输出构件,其中传动装置1100的适宜的可替代元件旋转接地。例如,环形齿轮1151可以接地并且外拼合皮带轮1120a、1120b可以被允许旋转。在这种示例中,经由传动装置1100,输出构件可以连接到外拼合皮带轮1120a、1120b,并且旋转和/或转矩可以从输入构件1110传递给连接到外拼合皮带轮1120a、1120b的输出构件。
传动装置1100的传动比可以通过调节外拼合皮带轮和内拼合皮带轮的半皮带轮之间的轴向距离来控制。可以通过相对于第一输入构件1110的旋转向第二输入构件1170施加差动旋转来实现内拼合皮带轮的半皮带轮之间的轴向距离的调节。第一内拼合皮带轮的第一半皮带轮1130a连接到与第一内拼合皮带轮的第二半皮带轮1130b的螺纹部分1183接触的第一螺杆1180,使得第一螺杆1180相对于第二半皮带轮1130b的螺纹部分1183的旋转产生第一内拼合皮带轮的半皮带轮1130a、1130b之间的力和轴向距离变化中的至少一个。类似地,第二内拼合皮带轮的第一半皮带轮1135a连接到与第二内拼合皮带轮的第二半皮带轮1135b的螺纹部分1188接触的第二螺杆1185,使得第二螺杆1185相对于第二半皮带轮1135b的螺纹部分1188的旋转产生第二内拼合皮带轮的半皮带轮1135a、1135b之间的力和轴向距离变化中的至少一个。
第一螺杆1180和第二螺杆1185连接到相应的第一齿轮1181和第二齿轮1186,该第一齿轮和第二齿轮与连接到第二输入构件1170的恒星齿轮1171啮合接触。因此,第一输入构件1110和第二输入构件1170之间的相对旋转导致螺杆1180、1185相对于相应的内拼合皮带轮的旋转。因此,这种相对旋转允许控制内拼合皮带轮的半皮带轮之间的轴向距离,从而允许控制传动装置1100的传动比。外拼合皮带轮的半皮带轮1120a、1120b之间的轴向距离可以通过另一主动机构(未示出)来控制。附加地或替代地,外拼合皮带轮的半皮带轮1120a、1120b之间的轴向距离可以由连接在外拼合皮带轮的半皮带轮1120a、1120b之间的弹簧或其他弹性元件被动地控制。
需要注意的是,图11中示出的实施例仅旨在作为非限制性示例。预见到可替代的实施例。例如,不同的机构(例如,齿条、线性齿轮、半皮带轮之间的螺纹连接)可以用于将第一输入构件1110和第二输入构件1170之间的差动旋转转换成第一拼合皮带轮和第二拼合皮带轮的半皮带轮之间的轴向运动。各内拼合皮带轮的示例半皮带轮可以旋转地耦合到它们各自的行星齿轮1131、1136的旋转。在一些示例中,第二输入构件1170可以经由环形齿轮与螺旋齿轮1181、1186相连接。
在图12中示出了这种传动装置1200的示例。传动装置1200包括具有第一半皮带轮1220a和第二半皮带轮1220b的外拼合皮带轮,第一半皮带轮1220a和第二半皮带轮1220b具有相应的支承表面1221a、1221b,外拼合皮带轮经由该支承表面与皮带1240接触。传动装置1200还包括两个内拼合皮带轮。第一内拼合皮带轮包括第一半皮带轮1230a和第二半皮带轮1230b,第一半皮带轮1230a和第二半皮带轮1230b具有相应的支承表面1232,第一内拼合皮带轮经由该支承表面与皮带1240接触。第二内拼合皮带轮包括第一半皮带轮1235a和第二半皮带轮1235b。每个内拼合皮带轮的半皮带轮彼此旋转地锁定(例如,经由匹配的销和凹部),这种施加到特定内拼合皮带轮的半皮带轮中的一个的驱动转矩(例如,经由熔合到半皮带轮的行星齿轮)也施加到特定内拼合皮带轮的另一个半皮带轮。第一内拼合皮带轮和第二内拼合皮带轮连接到与中央恒星齿轮1211和外环形齿轮1251啮合接触的相应的第一行星齿轮1231和第二行星齿轮1236,该外环形齿轮与恒星齿轮同轴。第一内拼合皮带轮和第二内拼合皮带轮通过行星齿轮架(未示出)或经由一些其他方式(例如,经由由恒星齿轮1211和环形齿轮1251施加的力)以相对平衡的布置保持在传动装置1200内。
传动装置1200具有连接到恒星齿轮的第一输入构件1210和连接到环形齿轮1251的输出构件1250。外拼合皮带轮的半皮带轮1220a、1220b机械接地以防止旋转。因此,可以根据传动比经由内拼合皮带轮在第一输入构件1210和输出构件1250之间传递旋转和/或转矩,该传动比可以通过调节外拼合半皮带轮和内拼合皮带轮之间的半皮带轮的轴向距离来控制。
传动装置1200的传动比可以通过调节外拼合皮带轮和内拼合皮带轮的半皮带轮之间的轴向距离来控制。可以通过相对于第一输入构件1210的旋转向第二输入构件1270施加差动旋转来实现内拼合皮带轮的半皮带轮之间的轴向距离的调节。第一内拼合皮带轮的第一半皮带轮1230a连接到与第一内拼合皮带轮的第二半皮带轮1230b的螺纹部分1283接触的第一螺杆1280,使得第一螺杆1280相对于第二半皮带轮1230b的螺纹部分1283的旋转产生第一内拼合皮带轮的半皮带轮1230a、1230b之间的力和轴向距离变化中的至少一个。类似地,第二内拼合皮带轮的第一半皮带轮1235a连接到与第二内拼合皮带轮的第二半皮带轮1235b的螺纹部分1288接触的第二螺杆1285,使得第二螺杆1285相对于第二半皮带轮1235b的螺纹部分1288的旋转产生第二内拼合皮带轮的半皮带轮1235a、1235b之间的力和轴向距离变化中的至少一个。
第一螺杆1280和第二螺杆1285连接到相应的第一齿轮1281和第二齿轮1286,该第一齿轮和第二齿轮与连接到第二输入构件1270的环形齿轮1271啮合接触。因此,第二输入构件1270的旋转可以引起螺杆1280、1285相对于相应的内拼合皮带轮旋转。因此,控制第二输入构件1270的旋转可以允许控制内拼合皮带轮的半皮带轮之间的轴向距离,从而允许控制传动装置1200的传动比。代替恒星齿轮,使用环形齿轮来驱动螺杆1280、1285(例如,如图11的传动装置1100中那样)可以允许改变传动装置1200的传动比所需的转速和/或转矩被定制为适用于应用。特别地,相对于保持特定传动比所需的第一输入构件1210的旋转速度,环形齿轮的使用可以降低第二输入构件1270的旋转速度(即,不需要通过第二输入构件的速度来改变传动装置1200的传动比)。
外拼合皮带轮的半皮带轮1220a、1220b之间的轴向距离可以通过另一主动机构(未示出)来控制。附加地或替代地,外拼合皮带轮的半皮带轮1220a、1220b之间的轴向距离可以由连接在外拼合皮带轮的半皮带轮1220a、1220b之间的弹簧或其他弹性元件被动地控制。
V.结论
附图中示出的特定布置不应视为限制。应该理解的是,其他实施例可以包括给定附图中示出的每个元件的更多或更少。进一步地,可以组合或省略示出的一些元件。然而进一步地,示例性实施例可以包括附图中未示出的元件。
此外,虽然本文已经公开了各个方面和各个实施例,但是对于本领域技术人员来说,其他方面和其他实施例将是显而易见的。本文所公开的各个方面和各个实施例是为了说明的目的,并且不是限制性的,而其真实范围和精神由随附的权利要求书指出。在不脱离本文提出的主题的精神或范围的情况下,可以使用其他实施例,并且可以进行其他改变。容易理解的是,如本文一般描述的和在附图中示出的本公开的各个方面可以以各种不同的配置来布置、替换、组合、分离和设计,所有这些在本文中都有预期到。
特别地,需要注意的是,本文的实施例可以由从拼合皮带轮(或其他驱动元件)沿相反方向向外延伸的输入端驱动或由沿相同的方向延伸的输入端(例如,同轴并且互相嵌套的输入端)驱动。此外,本文示出的用于控制拼合皮带轮的半皮带轮之间的轴向间隔的实施例可以接收与拼合皮带轮的旋转轴和/或几何轴同轴(例如,与半皮带轮的锥形支承表面的旋转轴同轴)的输入端。可选择地,这些实施例可以接收与拼合皮带轮的旋转轴和/或几何轴不同轴的输入端(例如,输入端可以经由一个或多个凸轮、经由恒星齿轮、环形齿轮或其他各种齿轮、经由皮带或者经由一些其他方式驱动拼合皮带轮,以使得能够根据嵌套的传动装置配置驱动拼合皮带轮或促进一些其他应用)。
- 具有嵌套式皮带轮的变速传动装置
- 具有嵌套的部件的用于锥形缠绕式传动装置的锥盘组件