具有压入式传感器单元的扭矩传感器单元
文献发布时间:2023-06-19 09:23:00
本发明涉及一种具有权利要求1的前序部分的特征的扭矩传感器单元、特别是用于机动车辆的机电动力转向系统的扭矩传感器单元以及一种具有权利要求14的前序部分的特征的用于对用于机电动力转向系统的扭矩传感器单元进行组装的方法。
常规的扭矩传感器具有旋转角度传感器。在此,可以相对于彼此以有限的程度旋转的两个轴部件通过扭簧彼此弹性地联接。当一个轴部件通过由车辆驾驶员施加的扭矩相对于另一轴部件旋转时,相对旋转的角度基本上与引入的扭矩成正比。为了准确地确定扭矩,重要的是能够精确地测量旋转角度。
例如从公开文献DE 10 2007 043 502 A1中已知这种扭矩传感器。在上转向轴上布置有环形磁铁,同时在下转向轴上附接有具有磁性定子的保持架,该保持架在径向方向上与永磁体相对定位且间隔较小的气隙。磁体的磁通量经由通常由两个分开的定子部分组成的定子传导至第一通量导体和第二通量导体,然后,该第一通量导体和第二通量导体将磁通量释放至磁性传感器、例如霍尔传感器。
公开文献DE 10 2004 055 124 A1公开了一种扭矩传感器,其中,该传感器通过螺纹连接与保持架连接。该解决方案被证明是不利的,因为由于部件的螺钉固定需要大量的单个部件。此外,由于螺钉需要诸如螺纹切削之类的机加工操作以及对螺钉进行旋紧,因此制造方法复杂。
因此,本发明的目的是提出一种易于制造的通用类型的扭矩传感器。另外,本发明的目的是设计一种用于制造扭矩传感器的特别简单的方法。
该目的通过具有权利要求1的特征的扭矩传感器单元并通过具有权利要求14的特征的方法来实现。从从属权利要求中可以得出有益的改进。
根据以上内容,扭矩传感器单元包括:
-环形磁体和磁通量导体,该环形磁体可以连接至第一分轴以共同旋转,该磁通量导体可以连接至第二分轴;
-传感器单元,该传感器单元具有第一壳体,该传感器单元检测分轴之间的旋转角度的变化;
-第二壳体,该第二壳体围绕环形磁体和磁通量导体并且固定地连接至传感器单元的第一壳体,其中,扭矩传感器单元的第二壳体具有壳体开口,传感器单元的第一壳体被压入该壳体开口中以形成摩擦连接。
因此,扭矩传感器在没有螺纹连接的情况下固定地连接至传感器单元,这大大简化了生产过程。
特别优选地,由于将第一壳体以及因此将传感器单元压入到第二壳体中,因此提供了仅由摩擦力形成的连接。
此外,可以想到并且可能的是,通过使用用于密封的粘合剂或接合剂来提供附加的整体连接。
优选地,传感器单元包括磁通量导体和布置在印刷电路板上的磁性传感器。优选地,磁通量导体相对于彼此对准,使得磁场传感器相对于环形磁体居中地布置。
优选的是,壳体开口在至少两个侧面上具有第一轮廓,其中,所述至少两个侧面有利地彼此相反地定位并且平行于分轴的纵向轴线延伸。优选的是,传感器单元的第一壳体具有第二轮廓,该第二轮廓布置在与壳体开口的所述至少两个侧面相对应的外表面上。优选地,第一轮廓和第二轮廓为波纹状或形成为齿状。一个轮廓优选地平行于转向轴的纵向轴线延伸。凹槽被定向为大致垂直于纵向轴线,以作为横向槽。作为配合件,在要与该轮廓接合的另一轮廓上,同样设置有波纹轮廓,但是该波纹轮廓的凹槽在平行于纵向轴线的纵向方向上延伸,以作为纵向槽。还可以想到并且可能的是,将第一轮廓和第二轮廓形成为平行的横向齿部。第一轮廓可以基于纵向轴线以45°的角度布置,而另一齿部可以基于纵向轴线以135°的角度布置。此外,可以想到并且可能的是,第一轮廓和第二轮廓设置有可变齿,可变齿在整个轮廓上具有几何形状可变的齿。同样,轮廓可以形成为滚花。
在优选实施方式中,第一轮廓和第二轮廓优选地相对于彼此旋转大约90°的角度。优选地,轮廓具有平行布置的凹槽。
此外,可以想到并且可能的是,设置有第二防护装置,该第二防护装置防止传感器单元沿相反的结合方向移出。
在结合操作期间,轮廓被推到彼此上以形成摩擦连接。有利的是,两个轮廓中的一个轮廓已经引入的材料与两个轮廓中的另一个轮廓已经引入的材料相比具有更高的延展性。可以想到并且可能的是,在轮廓之间布置弹性减震器,以防止磨损并将操作期间的噪音降至最低。为了密封轮廓,可以在轮廓之间施加粘合剂、涂层或接合剂。
在一个实施方式中,传感器单元的第一壳体具有T形区域,该T形区域具有颈部和垂直于该颈部布置的横档。垂直或横向定位的横挡优选地是板状的。优选的是,横挡在被压入时与扭矩传感器单元的第二壳体的外侧部接触并且限制压入深度。传感器单元的第一壳体的颈部优选地朝着横档加宽,第二轮廓在加宽的区域中被施加到壳体开口的至少两个侧面上。优选地,当轮廓被压入时,轮廓相互接合以形成摩擦连接。
此外,提供了一种用于机动车辆的机电转向系统,该机电转向系统具有:转向小齿轮,该转向小齿轮连接至第一分轴,并且该转向小齿轮与用于方向盘的齿条啮合,其中,齿条安装在第三壳体中并且可以沿纵向轴线移位;至少一个电动马达,所述至少一个电动马达用于转向力辅助;前述的扭矩传感器单元,该扭矩传感器单元布置在连接至方向盘的第二分轴与第一分轴之间并检测由驾驶员引入方向盘中的扭矩。
此外,提供了一种用于组装用于机电动力转向系统的扭矩传感器单元的方法,该扭矩传感器单元包括:
-连接至第一分轴以共同旋转的环形磁体和连接至第二分轴的磁通量导体,其中,两个轴向相反的分轴经由扭力杆(32)彼此连接;
-在物理上固定的传感器单元,该传感器单元具有第一壳体,其中,该传感器单元检测分轴之间的旋转角度的变化;
-第二壳体,该第二壳体包围环形磁体和磁通量导体,其中,提供有以下步骤:
-将传感器单元定位在扭矩传感器单元的第二壳体的壳体开口中;
-将传感器单元压入到壳体开口中以形成摩擦连接。
这种类型的连接可以非常简单且自动地产生。
优选地,定位包括以下步骤:
-将传感器单元引入到壳体开口中;
-将传感器单元降低到壳体开口中,直到传感器单元贴靠壳体开口并到达至磁通量导体中;
-使传感器单元在壳体开口中在由磁通量导体形成的两个极限之间移动,以确定中心位置;
-将壳体开口中的传感器单元移动至中心位置。
定位和压入优选地由具有夹持臂的机器人来执行,该夹持臂夹持传感器单元,然后执行适当的方法步骤。机器人优选地被设计为灵敏的。夹持臂优选地以最大允许力夹持传感器单元并以预定的力将传感器单元压入到壳体开口中。通过检测极限位置并计算预定距离,可以得出在磁通量导体之间的在纵向轴线上的中心位置。
优选地,传感器单元包括磁通量导体和布置在印刷电路板上的磁性传感器。
优选的是,壳体开口在至少两个侧面上具有第一轮廓,其中,所述至少两个侧面有利地彼此相对定位并且平行于分轴的纵向轴线延伸。优选的是,传感器单元的第一壳体具有第二轮廓,该第二轮廓布置在与壳体开口的所述至少两个侧面相对应的外表面上。
在优选实施方式中,第一轮廓和第二轮廓优选地相对于彼此旋转大约90°的角度。轮廓优选地具有平行布置的凹槽。
在结合操作期间,轮廓被推到彼此上以形成摩擦连接。有利的是,两个轮廓中的一个轮廓已经引入的材料与两个轮廓中的另一轮廓已经引入的材料相比具有更高的延展性。
在一个实施方式中,传感器单元的第一壳体具有T形区域,该T形区域具有颈部和垂直于该颈部布置的横档。优选的是,横挡在被压入时与扭矩传感器单元的第二壳体的外侧部接触并且限制压入深度。传感器单元的第一壳体的颈部优选地朝向横档加宽,第一轮廓在加宽的区域中施加到壳体开口的所述至少两个侧面上。
扭矩传感器组件优选地附接至机动车辆中的转向轴并且固定至转向轴的两个轴向相反的分轴上,并且扭矩传感器组件检测分轴之间的旋转角度的变化。
下面将通过使用附图来更详细地解释本发明的优选实施方式。在附图中,相同且功能相同的部件以相同的附图标记提供。在附图中:
图1示出了机电动力转向系统的示意图;
图2示出了具有电动马达、扭矩传感器和转向角度传感器的机电动力转向系统的立体图;
图3示出了扭矩传感器的分解图;
图4示出了在第一组装步骤中的扭矩传感器的纵向截面;
图5示出了具有已定位的磁性传感器的扭矩传感器的视图;
图6、图7示出了在磁性传感器沿纵向方向对准期间的扭矩传感器的纵向截面;
图8示出了扭矩传感器与磁性传感器对准后的视图;
图9示出了在最后的组装步骤中的扭矩传感器的纵向截面;
图10示出了布置在转向轴上的扭矩传感器的立体图;
图11示出了穿过图10中的布置结构的纵向截面;以及
图12至图16示出了通过机器人组装扭矩传感器的示意图。
图1示意性地示出了具有方向盘2的机电汽车伺服转向系统1,该方向盘2联接至转向轴3以共同旋转。驾驶员通过方向盘2将适当的扭矩作为转向指令引入到转向轴3中。然后,扭矩通过转向轴3传递至转向小齿轮4。小齿轮4以已知的方式与齿条5的齿段50啮合。转向小齿轮4与齿条5一起形成转向齿轮机构。齿条5安装在第三转向壳体中,使得齿条5可以沿其纵向轴线的方向移位。齿条5在其自由端部处通过未示出的球窝接头连接至横拉杆6。横拉杆6本身通过短轴以已知的方式连接至机动车辆的转向轮7。方向盘2的旋转通过转向轴3和小齿轮4的连接而导致齿条5的纵向移位,并因此导致转向轮7的枢转。转向轮7在车道70上经历与转向运动相反地作用的反作用。因此,为了使轮7枢转,需要在方向盘2上施加相应的扭矩所必须的力。为了在该转向运动期间辅助驾驶员,设置有电动马达8、18,电动马达8、18具有伺服单元9的转子位置传感器(RPS)。伺服单元9可以作为动力辅助装置9、10、11联接至转向轴3、转向小齿轮4或齿条5。相应的动力转向辅助系统9、10、11将动力转向扭矩引入转向轴3、转向小齿轮4和/或齿条5中,该动力转向辅助系统9、10、11在转向工作期间辅助驾驶员。图1中所示的三个不同的动力辅助系统9、10、11示出了用于其布置的替代位置。通常,动力辅助系统仅占据所示位置中的单个位置。伺服单元可以作为叠加的转向系统布置在转向柱上,或者作为动力辅助装置布置在小齿轮4或齿条5上。
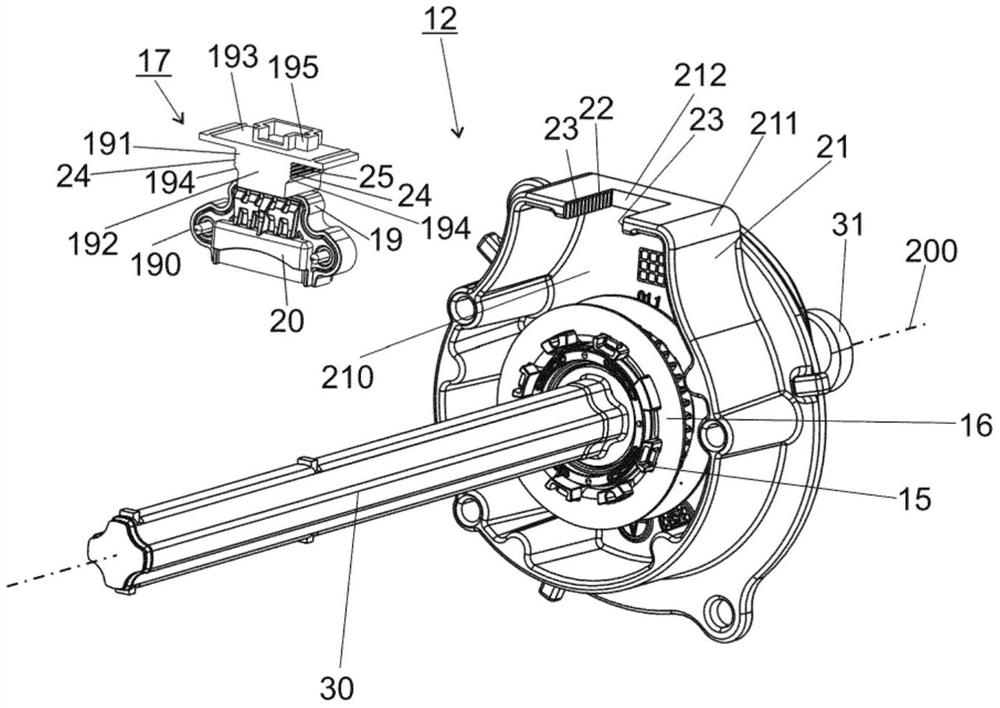
图2示出了扭矩传感器单元12,该扭矩传感器单元12是包括转向角度传感器单元14的整体模块13的一部分。扭矩传感器单元12检测上转向轴30相对于下转向轴31的旋转,以作为对上转向轴30上手动施加的扭矩的测量。另一方面,转向轴传感器单元14测量下转向轴31的当前转向角度。
上转向轴30和下转向轴31经由扭力杆32彼此旋转地弹性联接,如图4中所示。上转向轴30与下转向轴31之间的旋转可以经由旋转角度传感器来确定。所述旋转角传感器也被称为扭矩传感器。扭矩传感器单元12具有连接至上转向轴30以共同旋转的环形磁体(永磁体)15以及磁通量检测器16。相关联的传感器单元17在物理上固定地连接至电动马达18的单元。伺服单元9根据由扭矩传感器单元12测得的扭矩向驾驶员提供转向辅助。
图2进一步示出了这样的事实,即,电动马达或伺服马达18经由马达轴联接至未示出的蜗杆轴。蜗杆轴的蜗杆与蜗轮180啮合,该蜗轮180连接至小齿轮或如此处所示连接至下转向轴31以共同旋转。当操作电动马达18时,蜗杆轴被驱动并且蜗轮180以相应的方式旋转,以便为下转向轴31提供旋转支持。
图3详细示出了具有磁性传感器的单个扭矩传感器单元12。传感器单元17具有第一壳体19和布置在第一壳体19中的磁通量导体20,以及布置在印刷电路板170上的磁性传感器171,如图4中所示。通量导体16、20用于将磁通量集中在磁性传感器上。磁性传感器171检测连接至磁环15的上转向轴30相对于连接至磁通量导体16的下转向轴31的旋转。传感器单元17的第一壳体19具有第一区域190,在该第一区域190中容纳有磁通量导体20、印刷电路板170和磁性传感器171。在组装状态下,第一壳体19的所述第一区域190由未示出的壳体盖封闭。在与第一区域190邻接的第二区域191中,第一壳体19构造成T形。为了形成T形,第一壳体19具有颈部192,该颈部192在传感器的组装状态下在转向轴3的纵向轴线200的径向方向上延伸并且与横向横档193邻接。颈部192沿垂直于纵向轴线200的横档193的方向加宽。为此,颈部192在两个侧部具有壁架194。横向横挡193是板状的。在横向横挡的背离颈部的上侧部上,横向横挡具有呈边缘形式的突出部195,该突出部195包围未示出的布置在横档193上的接触元件。该突出部195形成在传感器的组装状态下供插头插入的连接器元件,以便将传感器连接至数据线和电源。
在借助于机器人的组装过程中,传感器单元17的第一壳体19被插入到扭矩传感器单元12的第二壳体21中。在组装状态下,扭矩传感器单元的第二壳体21包围环形磁体15、通量导体16和传感器单元17。扭矩传感器单元的第二壳体21具有用作基部的底表面210,该底表面210被边缘211周向环绕。第二壳体21被未示出的壳体盖覆盖。第二壳体21在边缘211中具有壳体开口212,该壳体开口212在一侧上敞开并且传感器单元17插入该壳体开口212中。为了将传感器单元17定位在壳体开口212中,壳体开口具有呈在侧面23上平行布置的凹槽(槽)形式的波纹状轮廓22,其平行于转向轴的纵向轴线200延伸。凹槽定向成大致垂直于纵向轴线200(横向槽)。作为配合件,在传感器单元17的壳体颈部192的要与壳体开口接合的侧部24上、在壁架194上方同样设置有波纹状轮廓25,但是该波纹状轮廓25的凹槽在纵向方向上平行于纵向轴线延伸(纵向槽)。因此,两个轮廓22、25被优选地布置成相对于彼此旋转大约90°的角度。在将传感器单元17组装在扭矩传感器的第二壳体21中的过程中,传感器单元17被压入到壳体开口212中。优选地,用于设置有轮廓的一对侧部23、24的材料与另一对侧部23、24的材料相比具有较高的延展性。在压紧动作期间,由具有较高延展性的材料制成的该对侧部的槽利用摩擦配合压入到另一对侧部的交叉槽中。在组装状态下,传感器单元17的第一壳体19的横档193的下侧部放置在扭矩传感器的第二壳体21的边缘211的外侧部上。在该过程中,传感器单元17的第一壳体19的颈部192穿过壳体开口212。
传感器单元17通过灵敏的机器人27与按压轴对准并定位在扭矩传感器的第二壳体21中。
在图4至图9中示出了组装方法。在第一组装步骤(图4)中,传感器单元17与转向轴3以预定距离对准并沿着纵向轴线200引入到扭矩传感器的第二壳体21的壳体开口212中。箭头指示运动方向。传感器单元17的颈部192在壁架194下方穿过壳体开口212。壁架194下方的颈部192的口径小于壳体开口212的口径,使得传感器单元17在第一步骤中不与扭矩传感器的第二壳体21接触。
如图5中所示,在第二组装步骤中,传感器单元17以预定的力压到扭矩传感器的第二壳体21上,使得传感器单元17在颈部192处在壁架194的区域中与扭矩传感器12的第二壳体21的边缘211接触。传感器单元17的第一壳体19被构造成使得传感器单元17的磁通量导体20接合在连接至下转向轴31的磁通量传感器16之间。传感器单元17的磁通量传感器20构造成在沿着纵向轴线200的轮廓上呈H形;两个横向元件接合在磁通量导体16的环状件之间,该磁通量导体16的环状件构造成在沿纵向轴线的轮廓上呈U形。例如,在图6中示出了该状态。
在进一步的组装步骤中,如图6和图7的纵向截面中所示,传感器单元17沿纵向轴线200移位,具体地使得传感器单元17相对于连接至下转向轴31的磁通量导体16居中地布置。为此,首先将传感器单元17移动到图6和图7中所示的两个端部位置,在所述两个端部位置中,在每种情况下,传感器单元的磁通量导体20的外侧部中的一个外侧部与连接至下转向轴31的磁通量导体16的内部接触,并且在此之后,得出通过使用极限位置所确定的中心位置。然后将传感器单元17压入到壳体开口212中,直到横挡193的下侧部与扭矩传感器的第二壳体21的边缘211的外侧部接触。该组装状态在图8和图9中示出。磁通量导体16、20相对于彼此对准,使得磁场传感器26相对于环形磁体15居中地布置。磁通量导体16、20在被压入时在径向方向上显著交叠,使得传感器单元17可以检测环形磁体15相对于磁通量导体16的运动。
图10示出了布置在转向轴3上的具有已安装的传感器单元17的扭矩传感器单元12。图11示出了穿过组件的相应的纵向截面。
在图12至图16中示出了扭矩传感器单元12借助于机器人27的上述组装。
机器人27具有多轴机械手,该多轴机械手例如可以设计成呈多轴关节臂机器人的形式。机械手的各个轴的运动可以通过对驱动器的特定控制来实现,该驱动器连接至机械手的各个部件。机器人优选是灵敏的并且具有至少一个集成的传感器装置,所述至少一个集成的传感器装置被配置成测量力和位移。多轴机械手具有按压轴28。机器人27具有可以围绕第一枢转轴线旋转的夹持臂29。如图12中所示,夹持臂29夹持传感器单元17并以最大允许力F
图15和图16示出了机器人的按压轴28如何夹持传感器单元17并且以预定的力F
机器人的使用允许结合过程完全自动化,因此可以特别经济地进行。
- 具有压入式传感器单元的扭矩传感器单元
- 用于机动车辆的传感器装置的磁体单元,具有磁体单元的传感器装置和具有传感器装置的机动车辆