一种针对中上单翼飞机快速应急救援设备
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及飞机转运救援技术领域,尤其涉及一种针对中上单翼飞机快速应急救援设备。
背景技术
由于大型飞机体积大、质量重,对专门的抢救设备依赖性高,飞机抢救拖离跑道难度大。当前,民机后勤保障机构与军用机场大多数只配备了下单翼飞机的普通抢救装置,而该普通抢救装置上的抢救设备单一、落后,仅可完成起落架完好前提下发生爆胎等轻微事故抢救和下单翼飞机搬运拖离、且适用性还有待提高和完善。针对大型中上单翼运输机、轰炸机的抢救技术手段缺乏,在目前范围来看,研究尚属空白。
飞机因自身的技术状态、气候环境、操作不当等因素诱发飞机冲离跑道、起落架断损等机械故障导致飞机停滞在跑道上,这就需要借助专用的应急救援设备将受损飞机快速拖离跑道,对整个救援过程来说,救援时间是最关键的救援制约因素,低效率的救援方式会影响后续战训飞机的飞行安全和频繁起降要求。
由于中上单翼飞机结构特殊,机翼和机腹不在同平面,在托举和搬运过程中,无法使用小型飞机的救援平台车、吊车等常规救援设备,且目前市场尚无完备的中上单翼飞机应急救援设备,同时也无可参考的技术文献和相关技术研究,这极大提高了科研攻关难度。
针对现阶段的飞机应急救援设备,如天津中安公司研发的应急救援设备,设备种类较繁多,需要借助多种救援设备,同时该设备主要针对下单翼和普通民航机的救援,对中上单翼飞机突发的迫降工况处理能力不足。即便配备了飞机多功能抢救车,但只能解决一些小型作战飞机的救援需求,针对大型中上单翼飞机救援方案,该设备依旧无法解决。
由此可见,现阶段各部队及机场所配备的飞机救援设备功能单一,针对性不强,大多数只对下单翼和小型飞机救援提供救援相应方案,无法快速解决中上单翼大型飞机的救援要求,同时,现有技术中的设备托板尺寸固定,无法根据不同飞机的种类对托板的高度进行调节,且无法在运输飞机时根据飞机的具体情况调节托板,在运输过程中设备会对机体造成二次损坏或机体脱落,导致现有技术中的设备运输效率低。
发明内容
为此,本发明提供一种针对中上单翼飞机快速应急救援设备,用以克服现有技术中无法根据飞机种类和实际运输情况对支撑部件尺寸进行调节导致的设备运输效率低的问题。
为实现上述目的,本发明提供一种针对中上单翼飞机快速应急救援设备,包括:
模块车,用以运输飞机;
主机翼可调式托举支撑装置,其设置在所述模块车上表面,用以支撑飞机机翼;
机身固定绑带,其设置在所述模块车上表面,用以辅助固定飞机的机身;
机身辅助支撑托架,其设置在所述模块车上表面,用以辅助支撑飞机的机腹;
中央处理器,其设置在所述模块车内部并分别与主机翼可调式托举支撑装置和机身辅助支撑托架相连,用以根据飞机的种类调节主机翼可调式托举支撑装置的支撑高度;
所述主机翼可调式托举支撑装置包括:
主框架支撑梁,其横向设置在所述模块车上表面;
两块连接板,各连接板均设置在所述主框架支撑梁下方且各连接板分别与所述模块车左侧壁和右侧壁相连,各连接板均与所述模块车的侧壁通过连接螺栓组相连;
两个翻转支架,各翻转支架分别设置在主框架支撑梁两端上表面,用以支撑飞机机翼,各所述翻转支架分别与所述主框架支撑梁通过第一活动铰链铰接,在所述翻转支架与所述第一活动铰链相对的侧壁上设有与所述主框架支撑梁相连的保险销钮,用以将翻转支架固定在主框架支撑梁上表面;在各所述翻转支架上端面均开设有两个翻转螺纹孔;
四个手轮螺母,其均匀设置在各所述翻转支架上表面并与翻转支架旋转连接,各手轮螺母均开设有手轮螺纹孔,各手轮螺纹孔分别与对应的翻转螺纹孔同心放置;
托板,其分别与各所述翻转支架相连且其设置在对应的所述手轮螺母上方,用以支撑飞机机翼,在各托板下表面螺栓连接有两根梯形丝杠,各梯形丝杠依次贯穿对应的手轮螺纹孔和翻转螺纹孔;在使用所述主机翼可调式托举支撑装置时,能够通过旋转手轮螺母调节对应托板的高度;在各托板下表面分别设有与所述中央处理器相连的距离传感器,用以检测各托板与对应翻转支架上表面的距离;在各所述托板的上表面分别设有与所述中央处理器相连的压力传感器,用以检测对应托板的承重值;
两个驱动装置,各驱动装置分别设置在对应翻转支架上并分别与对应的所述手轮螺母和所述中央处理器相连,在对所述托板高度进行调节时,中央处理器控制驱动装置启动,控制装置驱动对应的手轮螺母正转/反转以升高/降低托板的高度。
进一步地,所述机身辅助支撑托架包括:
底框架,其与所述模块车螺栓连接;
圆弧支撑托板,其设置在所述底框架上,圆弧支撑托板与所述底框架通过第二活动铰链铰接;
驱动杆,其两端分别和所述圆弧支撑托板与所述第二活动铰接链相对的侧壁以及所述模块车上表面相连,用以通过伸长/缩短控制圆弧支撑托板水平放置/竖直放置;所述驱动杆与所述中央处理器相连,用以接收中央处理器发出的信号并根据信号伸长或缩短。
进一步地,所述中央处理器中设有预设飞机种类矩阵A0和预设支撑矩阵组R0;对于预设飞机种类矩阵A0,A0(A1,A2,A3...An),其中,A1为第一预设飞机种类,A2为第二预设飞机种类,A3为第三预设飞机种类,An为第n预设飞机种类;对于预设支撑矩阵组R0,R0(R1,R2,R3...Rn),其中,R1为第一预设支撑矩阵,R2为第二预设支撑矩阵,R3为第三预设支撑矩阵,Rn为第n预设支撑矩阵;
对于第n预设支撑矩阵Rn,Rn(Hn,Gn),其中,Hn为第n预设高度,Gn为第n预设承重值;
当所述设备启动时,工作人员从A0矩阵中选取指定的待支撑飞机种类,中控处理器会根据选取的飞机种类对各所述支撑托板的高度进行调整:
当工作人员选取第一预设飞机种类A1时,中央处理器从R0矩阵组中选取R1矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至H1并将托板的预设承重值设置为G1;
当工作人员选取第二预设飞机种类A2时,中央处理器从R0矩阵组中选取R2矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至H2并将托板的预设承重值设置为G2;
当工作人员选取第三预设飞机种类A3时,中央处理器从R0矩阵组中选取R3矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至H3并将托板的预设承重值设置为G3;
当工作人员选取第n预设飞机种类An时,中央处理器从R0矩阵组中选取Rn矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至Hn并将托板的预设承重值设置为Gn。
进一步地,当所述中央处理器将托板高度调节至Hn时,各所述距离检测器会检测托板与翻转支架之间的距离H并将检测值输送至所述中央处理器:
当H<Hn时,中央处理器控制驱动装置驱动手轮螺母正转以使梯形丝杆带动托板上升;
当H=Hn时,中央处理器不对托板高度进行调节;
当H>Hn时,中央处理器控制驱动装置驱动手轮螺母反转以使梯形丝杆带动托板下降;
当中央处理器对所述托板高度进行调节时,距离检测器会实时检测托板下表面和翻转支架上表面间的距离H,当H=Hn时,中央处理器控制驱动装置停止驱动。
进一步地,当所述设备支撑第n种类的飞机时,所述压力传感器会检测托板承重值G并将检测值输送至所述中央处理器:
当G<Gn时,中央处理器控制驱动装置驱动手轮螺母正转以使梯形丝杆带动托板上升;
当G=Gn时,中央处理器不对托板高度进行调节;
当G>Gn时,中央处理器控制驱动装置驱动手轮螺母反转以使梯形丝杆带动托板下降;
当中央处理器对所述托板高度进行调节时,压力检测器会实时检测托板的承重值G,当G=Gn时,中央处理器控制驱动装置停止驱动。
进一步地,所述模块车上设有多组机身辅助支撑托架,用以提高所述设备支撑机腹的稳定性。
进一步地,所述圆弧支撑托板圆弧面设有软质衬垫,用以防止圆弧支撑托板对机腹造成损伤。
进一步地,当所述设备未支撑飞机时,中央处理器控制所述驱动杆伸长,驱动杆对所述圆弧支撑托板施加推力,使圆弧支撑托板以第二活动铰链为圆心旋转90度并水平设置在所述模块车上表面以使所述机身辅助支撑托架进入收纳状态;
当所述设备需要支撑飞机时,中央处理器控制所述驱动杆缩短,驱动杆对所述圆弧支撑托板施加拉力,使圆弧支撑托板以第二活动铰链为圆心旋转90度并竖直设置在所述模块车上表面以使所述机身辅助支撑托架进入支撑状态。
进一步地,当所述设备未支撑飞机时,工作人员按下所述保险销钮,保险销钮解除对所述翻转支架和主框架支撑梁之间的约束,翻转支架以所述第一活动铰链为圆心旋转180度以使所述主机翼可调式托举支撑装置进入收纳状态;
当所述设备需要支撑飞机时,将翻转支架以所述第一活动铰链为圆心旋转180度并通过所述保险销钮对翻转支架和主框架支撑梁进行约束以使所述主机翼可调式托举支撑装置进入支撑状态。
与现有技术相比,本发明的有益效果在于,本发明通过采用的主框架支撑梁与翻转支架,一方面有效避开了机腹、发动机舱类凸起结构,同时又很好地解决了上单翼飞机机翼过高无法支撑托举的难题,保证运输状态平衡性要求,同时,本发明通过设置中央处理器并在中央处理器内设置预设种类矩阵和预设支撑矩阵组,能够使所述设备根据飞机的种类对托板的高度进行相应调节,能够使所述设备有效适用于多种不同种类的飞机,同时,中央处理器还能够根据设备在运输过程中各托板的承重值实时调节托板高度以防止机翼在运输过程中承载值过高或过低导致机翼发生二次损坏,提高了所述设备的运输效率。
进一步地,所述中央处理器通过转动手轮螺母调节与手轮螺母螺纹连接的梯形丝杆的位置以调节托板高度,在能够调节托板高度的同时,能够有效保证托板在支撑机翼时的稳定性,从而进一步提高了所述设备的运输效率。
进一步地,所述中央处理器会根据A0矩阵中选取的第n预设飞机种类An从R0矩阵组中选取对应的预设支撑矩阵Rn,并从Rn矩阵中选取对应的Hn和Gn,并将托板与翻转支架之间的初始距离调节为Hn,将各托板的预设承重值设置为Gn,通过设置预设承重值能够使设备在运输飞机时能够对各托板的承重值G进行实时监控,并根据监控结果实时调节托板的高度,从而进一步提高所述设备的运输效率。
进一步地,所述中央处理器在调节托板高度时,能够通过距离检测器实时检测托板与翻转支架之间的距离,从而对托板的高度进行准确调节,通过调节托板的初始高度,能够有效提高所述设备支撑飞机时的稳定性。
进一步地,模块车上设有多组机身辅助支撑托架,通过使用多组机身辅助支撑托架,能够进一步提高所述设备在支撑机腹时的稳定性,从而进一步提高所述设备的运行效率。
进一步地,所述圆弧支撑托板圆弧面设有软质衬垫,能够防止圆弧支撑托板对机腹造成损伤,进一步提高了所述设备的运输效率。
进一步地,所述圆弧支撑托板和所述底框架铰接,所述翻转支架和所述主框架支撑梁铰接,通过使用铰接的方式设置部件能够在设备不支撑飞机时进入收纳状态,从而减小了所述设备的放置空间。
附图说明
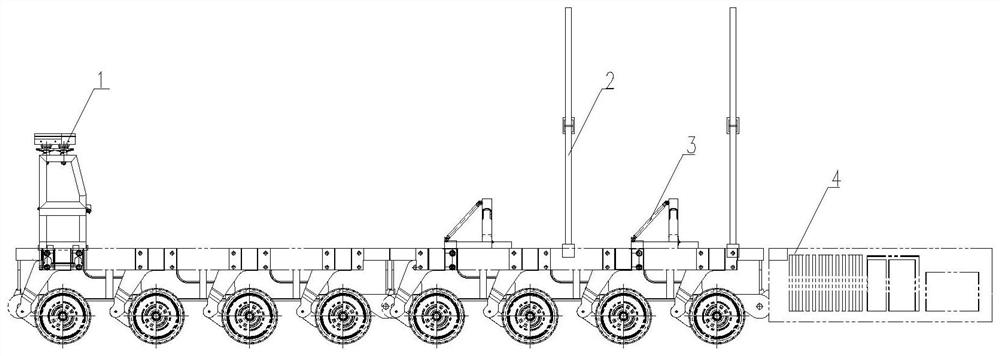
图1为本发明所述针对中上单翼飞机快速应急救援设备的结构示意图;
图2为本发明所述针对中上单翼飞机快速应急救援设备的俯视图;
图3为本发明所述针对中上单翼飞机快速应急救援设备的左视图;
图4为本发明所述主机翼可调式托举支撑装置的结构示意图;
图5为图4在A方向上的侧视图;
图6为本发明所述机身辅助支撑托架的主视图;
图7为本发明所述机身辅助支撑托架的左视图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
请参阅图1至图3所示,其分别为本发明所述针对中上单翼飞机快速应急救援设备的结构示意图、俯视图和左视图。本发明所述针对中上单翼飞机快速应急救援设备,包括主机翼可调式托举支撑装置1、机身固定绑带2、机身辅助支撑托架3、模块车4和中央处理器(图中未画出)。其中,所述主机翼可调式托举支撑装置1设置在所述模块车4上表面,用以支撑飞机机翼。所述机身固定绑带2设置在所述模块车4上表面,用以辅助固定飞机的机身。所述机身辅助支撑托架3设置在所述模块车4上表面,用以辅助支撑飞机的机腹。模块车4用以运输飞机。所述中央处理器设置在所述模块车4内部并分别与主机翼可调式托举支撑装置1和机身辅助支撑托架3相连,用以根据飞机的种类调节主机翼可调式托举支撑装置1的支撑高度。
当所述设备支撑飞机时,先使用辅助顶升气囊和机身千斤顶装置将飞机顶升至一定的工作高度,确保模块车4等救援装置能够顺利移动至机身底部,然后采用机身千斤顶缓缓将飞机落至设备上,主机翼可调式托举支撑装置1对主机翼梁部位进行托举,机身采用机身辅助支撑托架3进行机身尾段辅助支撑托举,并通过机身固定绑带2将机身和模块车4进行栓系,避免机体和模块车4之间产生轴向和周向窜动。
请参阅图4和图5所示,其为本发明所述主机翼可调式托举支撑装置的结构示意图和A方向上的侧视图。本发明所述主机翼可调式托举支撑装置包括主框架支撑梁1-1、两块连接板1-2、托板1-4、四个手轮螺母1-6、两个翻转支架1-7和两个驱动装置(图中未画出)。其中:
所述主框架支撑梁1-1横向设置在所述模块车4上表面。
各所述连接板1-2均设置在所述主框架支撑梁1-1下方且各连接板1-2分别与所述模块车4左侧壁和右侧壁相连,各连接板1-2均与所述模块车4的侧壁通过连接螺栓组1-3相连。
各所述翻转支架1-7分别设置在主框架支撑梁1-1两端上表面,用以支撑飞机机翼,各所述翻转支架1-7分别与所述主框架支撑梁1-1通过第一活动铰链1-9铰接,在所述翻转支架1-7与所述第一活动铰链1-9相对的侧壁上设有与所述主框架支撑梁1-1相连的保险销钮1-8,用以将翻转支架1-7固定在主框架支撑梁1-1上表面;在各所述翻转支架1-7上端面均开设有两个翻转螺纹孔(图中未画出)。
所述四个手轮螺母1-6均匀设置在各所述翻转支架1-7上表面并与翻转支架1-7旋转连接,各手轮螺母1-6均开设有手轮螺纹孔(图中未画出),各手轮螺纹孔分别与对应的翻转螺纹孔同心放置。
所述托板1-4分别与各所述翻转支架1-7相连且其设置在对应的所述手轮螺母1-6上方,用以支撑飞机机翼,在各托板1-4下表面螺栓连接有两根梯形丝杠1-5,各梯形丝杠1-5依次贯穿对应的手轮螺纹孔和翻转螺纹孔;在各托板1-4下表面分别设有与所述中央处理器相连的距离传感器(图中未画出),用以检测各托板1-4与对应翻转支架1-7上表面的距离;在各所述托板1-4的上表面分别设有与所述中央处理器相连的压力传感器(图中未画出),用以检测对应托板1-4的承重值。
驱动装置,各所述驱动装置分别设置在对应翻转支架1-7上并分别与对应的所述手轮螺母1-6和所述中央处理器相连,在对所述托板1-4高度进行调节时,中央处理器控制驱动装置启动,控制装置驱动对应的手轮螺母1-6正转/反转以升高/降低托板1-4的高度。
在使用所述主机翼可调式托举支撑装置1时,驱动装置驱动所述旋转手轮螺母1-6转动,旋转手轮螺母1-6带动所述梯形丝杠1-5移动以完成对所述托板1-4高度的调节。
具体而言,当所述设备未支撑飞机时,工作人员按下所述保险销钮1-8,保险销钮1-8解除对所述翻转支架1-7和主框架支撑梁1-1之间的约束,翻转支架1-7以所述第一活动铰链1-9为圆心旋转180度以使所述主机翼可调式托举支撑装置1进入收纳状态;当所述设备需要支撑飞机时,将翻转支架以所述第一活动铰链1-9为圆心旋转180度并通过所述保险销钮1-8对翻转支架1-7和主框架支撑梁1-1进行约束以使所述主机翼可调式托举支撑装置1进入支撑状态。
请参阅图6和图7所示,其为为本发明所述机身辅助支撑托架的主视图和左视图。本发明所述机身辅助支撑托架包括圆弧支撑托板3-1、底框架3-2和驱动杆3-3。其中:所述圆弧支撑托板3-1设置在所述底框架上,圆弧支撑托板3-1与所述底框3-2通过第二活动铰链3-4铰接。所述底框架3-2与所述模块车4螺栓连接。所述驱动杆3-3两端分别和所述圆弧支撑托板3-1与所述第二活动铰接链3-4相对的侧壁以及所述模块车4上表面相连,用以通过伸长/缩短控制圆弧支撑托板3-1水平放置/竖直放置;所述驱动杆3-3与所述中央处理器相连,用以接收中央处理器发出的信号并根据信号伸长或缩短。
当所述设备未支撑飞机时,中央处理器控制所述驱动杆3-3伸长,驱动杆3-3对所述圆弧支撑托板3-1施加推力,使圆弧支撑托板3-1以第二活动铰链3-4为圆心旋转90度并水平设置在所述模块车4上表面以使所述机身辅助支撑托架3进入收纳状态;当所述设备需要支撑飞机时,中央处理器控制所述驱动杆3-3缩短,驱动杆3-3对所述圆弧支撑托板3-1施加拉力,使圆弧支撑托板3-1以第二活动铰链3-4为圆心旋转90度并竖直设置在所述模块车4上表面以使所述机身辅助支撑托架3进入支撑状态。
具体而言,所述模块车4上设有多组机身辅助支撑托架3,用以提高所述设备支撑机腹的稳定性。
具体而言,所述圆弧支撑托板3-1的圆弧面设有软质衬垫,用以防止圆弧支撑托板3-1对机腹造成损伤。
请参阅图1-图7所示,所述中央处理器中设有预设飞机种类矩阵A0和预设支撑矩阵组R0;对于预设飞机种类矩阵A0,A0(A1,A2,A3...An),其中,A1为第一预设飞机种类,A2为第二预设飞机种类,A3为第三预设飞机种类,An为第n预设飞机种类;对于预设支撑矩阵组R0,R0(R1,R2,R3...Rn),其中,R1为第一预设支撑矩阵,R2为第二预设支撑矩阵,R3为第三预设支撑矩阵,Rn为第n预设支撑矩阵。
对于第n预设支撑矩阵Rn,Rn(Hn,Gn),其中,Hn为第n预设高度,Gn为第n预设承重值。
当所述设备启动时,工作人员从A0矩阵中选取指定的待支撑飞机种类,中控处理器会根据选取的飞机种类对各所述支撑托板的高度进行调整:
当工作人员选取第一预设飞机种类A1时,中央处理器从R0矩阵组中选取R1矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至H1并将托板的预设承重值设置为G1;
当工作人员选取第二预设飞机种类A2时,中央处理器从R0矩阵组中选取R2矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至H2并将托板的预设承重值设置为G2;
当工作人员选取第三预设飞机种类A3时,中央处理器从R0矩阵组中选取R3矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至H3并将托板的预设承重值设置为G3;
当工作人员选取第n预设飞机种类An时,中央处理器从R0矩阵组中选取Rn矩阵,控制所述驱动装置启动,驱动装置驱动对应手轮螺母转动以将指定托板与对应翻转支架之间的距离调节至Hn并将托板的预设承重值设置为Gn。
具体而言,当所述中央处理器将托板高度调节至Hn时,各所述距离检测器会检测托板与翻转支架之间的距离H并将检测值输送至所述中央处理器:
当H<Hn时,中央处理器控制驱动装置驱动手轮螺母正转以使梯形丝杆带动托板上升;
当H=Hn时,中央处理器不对托板高度进行调节;
当H>Hn时,中央处理器控制驱动装置驱动手轮螺母反转以使梯形丝杆带动托板下降;
当中央处理器对所述托板高度进行调节时,距离检测器会实时检测托板下表面和翻转支架上表面间的距离H,当H=Hn时,中央处理器控制驱动装置停止驱动。
具体而言,当所述设备支撑第n种类的飞机时,所述压力传感器会检测托板承重值G并将检测值输送至所述中央处理器:
当G<Gn时,中央处理器控制驱动装置驱动手轮螺母正转以使梯形丝杆带动托板上升;
当G=Gn时,中央处理器不对托板高度进行调节;
当G>Gn时,中央处理器控制驱动装置驱动手轮螺母反转以使梯形丝杆带动托板下降;
当中央处理器对所述托板高度进行调节时,压力检测器会实时检测托板的承重值G,当G=Gn时,中央处理器控制驱动装置停止驱动。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种针对中上单翼飞机快速应急救援设备
- 一种针对中上单翼飞机快速应急救援设备