一种高容错率可变形四旋翼飞行器及控制方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及多旋翼飞行器技术领域,尤其是一种高容错率可变形四旋翼飞行器及控制方法。
背景技术
近年来,发生了许多微形无人机MAV故障;例如麦当娜迪坎皮格里奥MarcelHirscher(奥地利世界杯高山滑雪赛车手)在意大利举行的高山激流回旋比赛中避免被无人机击中的情况,因此,这些故障不仅带来昂贵的机载设备和无人机本身破坏的风险,而且威胁人们的健康甚至生命。
最普遍的多旋翼飞行器设计是四旋翼飞行器。如有一个引擎被破坏将导致飞行器整体失效而坠落。目前,为了解决这个问题多旋翼引擎的数量增加了一倍甚至两倍,虽然这增强了灵活性,减少了飞行时间,但也显着提高了飞行器的重量以及成本。
发明内容
本发明提出一种高容错率可变形四旋翼飞行器及控制方法,可解决四旋翼飞行器在失效坠落时对人或物造成的伤害问题,以及如何降低飞行器失效损失的问题,并可以在少量旋翼失效时继续完成飞行任务。
本发明采用以下技术方案。
一种高容错率可变形四旋翼飞行器,所述飞行器的旋翼不少于四个,所述旋翼均设于飞行器的机臂处;所述机臂包括第一关节和第二关节;所述第一关节的始端固定于飞行器的机身处,第一关节以可相对机身水平面水平转动的第一旋转机构与第二关节的始端相连,使第二关节可相对机身水平面水平转动;所述第二关节以可相对机身水平面竖向转动的第二旋转机构与该机臂的旋翼相连,使旋翼朝向可相对机身水平面竖向转动;所述旋翼可通过正转或反转来向飞行器提供升力。
所述飞行器的旋翼数量为四个;所述飞行器包括飞行控制模块和姿态传感器,当飞行器处于飞行状态时,若有三个以下的旋翼发生升力失效状态,则飞行器使处于失效状态的失效旋翼停转,通过调整仍处于正常状态的工作旋翼的朝向、转速或位置来补偿飞行器的升力损失和扭矩损失,使飞行器恢复稳定飞行姿态。
当处于升力失效状态的旋翼数量为一个时,则飞行器处于单旋翼失效状态,飞行器使单旋翼失效状态下的失效旋翼停转,并使与失效旋翼相邻的两个机臂的第一关节驱动第二关节水平摆向失效旋翼,使这两个机臂处的工作旋翼接近失效旋翼以补偿飞行器的升力损失和扭矩损失,此时机身处于水平状态。
当处于升力失效状态的旋翼数量为两个时,则飞行器处于双旋翼失效状态,飞行器使双旋翼失效状态下的失效旋翼停转;
当处于升力失效状态的旋翼数量为三个时,则飞行器处于三旋翼失效状态,飞行器使三旋翼失效状态下的失效旋翼停转,
当飞行器处于双旋翼失效状态或三旋翼失效状态时,飞行器使工作旋翼所在机臂的第一关节、第二关节旋转,驱动机身以工作旋翼为悬点向下摆动并使飞行器转为竖立状态,当飞行器处于竖立状态时,工作旋翼位于飞行器顶部。
当飞行器处于竖立状态且无挂载重物时,飞行器的机身处于垂直状态;
当飞行器处于竖立状态且机身下方挂载重物时,飞行器的机身处于倾斜状态,以使携有重物的飞行器的质心位于工作旋翼下方。
所述飞行器的旋翼环绕飞行器机身均匀设置,当各机臂的第二关节竖向转动,使各旋翼位于机身上方,且其驱动的气流向机身外侧下方流动以减小飞行器机架湍流时,飞行器处于低湍流飞行状态。
所述飞行器的旋翼环绕飞行器机身均匀设置,当各机臂的第二关节竖向转动,使各旋翼位于机身下方并反向转动来提供升力时,飞行器处于颠倒飞行模式。
一种高容错率可变形四旋翼飞行器的控制方法,以上所述的飞行器,其旋翼由电机驱动,旋翼升力失效的原因为电机故障,当飞行器发生旋翼失效故障时,与失效旋翼相连的电机为故障电机,与工作旋翼相连的电机为推力电机,有以下控制方法,
方法A、在四旋翼飞行器中的一个旋翼失效的情况下,为继续保持稳定的飞行以及恢复飞行器原有飞行姿态来稳定其坐标,通过补偿质心的位置来控制飞行器,即通过移动故障电机相邻的两个电机并靠近故障电机,形成由三个推力电机组成的新的飞行模式;借助与故障电机相反方向的两个推力电机的螺旋桨产生稳定飞行器所需的补偿扭矩,这两个推力电机螺旋桨通过伺服电动机控制其旋转角度以及保持相同的旋向,实现通过其余三个推力电机完全控制飞行器在三个维度上的姿态及位置;
方法B、在四旋翼飞行器中的两个旋翼失效的情况下,通过使剩余两个推力电机纵向排列来完全控制四旋翼飞行器的位置,同时飞行器飞行姿态改变以使飞行器在当前推力工况下保持姿态稳定,若此时飞行器载有重物,则通过竖向旋转剩余两个推力电机来补偿飞行姿态改变后的质心位移;
方法C、在四旋翼飞行器中的三个旋翼失效的情况下,通过竖向旋转剩余的推力电机,使其产生的扭转力矩来使飞行器留在空中或是缓速下降,以便于确定四旋翼飞行器的位置。
所述四旋翼飞行器在飞行过程中发生电机故障时,以至少两个PD控制器是用来补偿由奇数螺旋桨产生的不平衡矩及稳定飞行器的方向,并维持其飞行功能以继续其任务而不坠毁,其控制策略有八个独立的输入变量,其中包括四个旋翼的转速和驱动旋翼旋转的四个电机的倾斜角;任何一个旋翼失效都会使两个输入变量脱离控制策略;为了补偿旋翼失效造成的力矩不平衡,仍在工作的推力电机的速度和倾斜角需要单独控制;机身的倾斜姿态需要以补偿失效旋翼的力矩来设置;
同时飞行器设有机载测量传感器来监测飞行工况并向飞行控制模块发送故障信息;
当飞行器的四个旋翼均为工作旋翼时,可以因旋翼推力及力矩的对称性在飞行器机身处产生稳定的动力学模型;设四个旋翼的推力分别为F
则当四个旋翼中有一个为失效旋翼,使M
其中sψ,cψ分别表示为sinψ,cosψ;sφ,cφ分别表示sinφ,cosφ。sθ,cθ分别表示sinθ,cosθ;ψ,θ,φ分别为偏航、俯仰、滚动角;m是四旋翼飞行器的总重量,g是重力加速度,x,y,z标系中四旋翼飞行器的位置,θ
其中ω
同样,角加速度由欧拉方程确定,表述为;
其中M′
由上述内容可知,稳定和控制该动力方程所描述系统的可用输入是三个推力电机工作转子的角速度ω
K
此时如果四旋翼飞行器第四个转子倾斜角为θ
由上述可知,当所述飞行器一个旋翼失效,剩余的旋翼螺旋桨角速度增加,也可以保持一定的飞行高度,以公式表述如下;
ω′
ω
ω
公式五;
ω
当四个旋翼中有两个为失效旋翼时,与工作旋翼相连的推力电机倾斜角设置为
然后开始补偿故障后的不平衡力矩,首先,回到悬停状态是必要的,然后,得到飞行器向特定俯仰或滚转角的方向;在
其中
Δω
Δω
Δθ
公式九;
其中p,q和r是飞行器在机身身框架中角速度的分量。
当所述飞行器以机身水平姿态飞行期间,其名义悬停状态
θ
其中r
与现有技术相比,本发明的有益效果是:
1.在拥挤的条件下可以安全飞行。
2.可以在对人类生命有威胁的恶劣的环境条件下(如自然灾害)运行。
3.在失效的情况下减少破坏损失(如安装在无人机上的昂贵设备的破坏)。
4.在飞行过程中如发生某旋翼失效,可发生变形来保持稳定飞行,避免失效直接坠落击中人或物。
5.生产便宜。
本发明采用的技术方案保留了四旋翼飞行器更容易实现悬停功能、可全方位移动、可以增加提起和搬运物体的有效载荷的优点并且对其进行了改进,特殊设计的四旋翼飞行器开发了推力发动机并且增加飞行器的自由度(DOF);本发明这样多旋翼飞行器的设计允许飞行器设计中仅使用四个螺旋桨发动机组以实现容错并提高可操作性,而且这样的设计仅略微增加了天线的成本和飞行器重量。
附图说明
下面结合附图和具体实施方式对本发明进一步详细的说明:
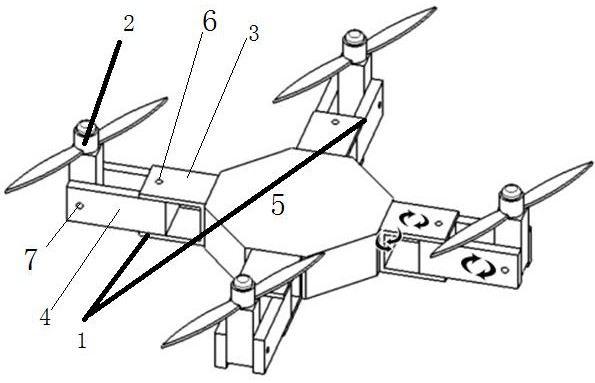
附图1表示本发明的一种高容错率可变形四旋翼飞行器的结构示意图。
附图2是变形飞行器一个旋翼失效模式示意图。
附图3是变形飞行器两个旋翼失效模式示意图。
附图4是变形飞行器载有重物且两个旋翼失效模式示意图。
附图5是变形飞行器三个旋翼失效模式示意图。
附图6是变形飞行器电机向内倾斜的飞行模式示意图。
附图7是变形飞行器电机颠倒的飞行模式示意图。
附图8是一个旋翼失效时四旋翼飞行器的动力模型图
图中:1-机臂;2-旋翼;3-第一关节;4-第二关节;5-机身;6-第一旋转机构;7-第二旋转机构;
21-失效旋翼;22-工作旋翼;32-重物。
具体实施方式
如图所示,一种高容错率可变形四旋翼飞行器,所述飞行器的旋翼2不少于四个,所述旋翼均设于飞行器的机臂1处;所述机臂包括第一关节3和第二关节4;所述第一关节的始端固定于飞行器的机身5处,第一关节以可相对机身水平面水平转动的第一旋转机构6与第二关节的始端相连,使第二关节可相对机身水平面水平转动;所述第二关节以可相对机身水平面竖向转动的第二旋转机构7与该机臂的旋翼相连,使旋翼朝向可相对机身水平面竖向转动;所述旋翼可通过正转或反转来向飞行器提供升力。
所述飞行器的旋翼数量为四个;所述飞行器包括飞行控制模块和姿态传感器,当飞行器处于飞行状态时,若有三个以下的旋翼发生升力失效状态,则飞行器使处于失效状态的失效旋翼21停转,通过调整仍处于正常状态的工作旋翼22的朝向、转速或位置来补偿飞行器的升力损失和扭矩损失,使飞行器恢复稳定飞行姿态。
当处于升力失效状态的旋翼数量为一个时,则飞行器处于单旋翼失效状态,飞行器使单旋翼失效状态下的失效旋翼停转,并使与失效旋翼相邻的两个机臂的第一关节驱动第二关节水平摆向失效旋翼,使这两个机臂处的工作旋翼接近失效旋翼以补偿飞行器的升力损失和扭矩损失,此时机身处于水平状态。
当处于升力失效状态的旋翼数量为两个时,则飞行器处于双旋翼失效状态,飞行器使双旋翼失效状态下的失效旋翼停转;
当处于升力失效状态的旋翼数量为三个时,则飞行器处于三旋翼失效状态,飞行器使三旋翼失效状态下的失效旋翼停转,
当飞行器处于双旋翼失效状态或三旋翼失效状态时,飞行器使工作旋翼所在机臂的第一关节、第二关节旋转,驱动机身以工作旋翼为悬点向下摆动并使飞行器转为竖立状态,当飞行器处于竖立状态时,工作旋翼位于飞行器顶部。
当飞行器处于竖立状态且无挂载重物时,飞行器的机身处于垂直状态;
当飞行器处于竖立状态且机身下方挂载重物32时,飞行器的机身处于倾斜状态,以使携有重物的飞行器的质心位于工作旋翼下方。
所述飞行器的旋翼环绕飞行器机身均匀设置,当各机臂的第二关节竖向转动,使各旋翼位于机身上方,且其驱动的气流向机身外侧下方流动以减小飞行器机架湍流时,飞行器处于低湍流飞行状态。
所述飞行器的旋翼环绕飞行器机身均匀设置,当各机臂的第二关节竖向转动,使各旋翼位于机身下方并反向转动来提供升力时,飞行器处于颠倒飞行模式。
一种高容错率可变形四旋翼飞行器的控制方法,以上所述的飞行器,其旋翼由电机驱动,旋翼升力失效的原因为电机故障,当飞行器发生旋翼失效故障时,与失效旋翼相连的电机为故障电机,与工作旋翼相连的电机为推力电机,有以下控制方法,
方法A、在四旋翼飞行器中的一个旋翼失效的情况下,为继续保持稳定的飞行以及恢复飞行器原有飞行姿态来稳定其坐标,通过补偿质心的位置来控制飞行器,即通过移动故障电机相邻的两个电机并靠近故障电机,形成由三个推力电机组成的新的飞行模式;借助与故障电机相反方向的两个推力电机的螺旋桨产生稳定飞行器所需的补偿扭矩,这两个推力电机螺旋桨通过伺服电动机控制其旋转角度以及保持相同的旋向,实现通过其余三个推力电机完全控制飞行器在三个维度上的姿态及位置;
方法B、在四旋翼飞行器中的两个旋翼失效的情况下,通过使剩余两个推力电机纵向排列来完全控制四旋翼飞行器的位置,同时飞行器飞行姿态改变以使飞行器在当前推力工况下保持姿态稳定,若此时飞行器载有重物,则通过竖向旋转剩余两个推力电机来补偿飞行姿态改变后的质心位移;
方法C、在四旋翼飞行器中的三个旋翼失效的情况下,通过竖向旋转剩余的推力电机,使其产生的扭转力矩来使飞行器留在空中或是缓速下降,以便于确定四旋翼飞行器的位置。
所述四旋翼飞行器在飞行过程中发生电机故障时,以至少两个PD控制器是用来补偿由奇数螺旋桨产生的不平衡矩及稳定飞行器的方向,并维持其飞行功能以继续其任务而不坠毁,其控制策略有八个独立的输入变量,其中包括四个旋翼的转速和驱动旋翼旋转的四个电机的倾斜角;任何一个旋翼失效都会使两个输入变量脱离控制策略;为了补偿旋翼失效造成的力矩不平衡,仍在工作的推力电机的速度和倾斜角需要单独控制;机身的倾斜姿态需要以补偿失效旋翼的力矩来设置;
同时飞行器设有机载测量传感器来监测飞行工况并向飞行控制模块发送故障信息;
当飞行器的四个旋翼均为工作旋翼时,可以因旋翼推力及力矩的对称性在飞行器机身处产生稳定的动力学模型;设四个旋翼的推力分别为F
则当四个旋翼中有一个为失效旋翼,使M
其中sψ,cψ分别表示为sinψ,cosψ;sφ,cφ分别表示sinφ,cosφ。sθ,cθ分别表示sinθ,cosθ;ψ,θ,φ分别为偏航、俯仰、滚动角;m是四旋翼飞行器的总重量,g是重力加速度,x,y,z标系中四旋翼飞行器的位置,θ
其中ω
同样,角加速度由欧拉方程确定,表述为;
其中M′
由上述内容可知,稳定和控制该动力方程所描述系统的可用输入是三个推力电机工作转子的角速度ω
K
此时如果四旋翼飞行器第四个转子倾斜角为θ
由上述可知,当所述飞行器一个旋翼失效,剩余的旋翼螺旋桨角速度增加,也可以保持一定的飞行高度,以公式表述如下;
ω′
ω
ω
公式五;
ω
当四个旋翼中有两个为失效旋翼时,与工作旋翼相连的推力电机倾斜角设置为
然后开始补偿故障后的不平衡力矩,首先,回到悬停状态是必要的,然后,得到飞行器向特定俯仰或滚转角的方向;在
其中
Δω
Δω
Δθ
公式九;
其中p,q和r是飞行器在机身身框架中角速度的分量。
当所述飞行器以机身水平姿态飞行期间,其名义悬停状态
θ
其中r
实施例:
本例中,机臂的第一旋转机构、第二旋转机构和旋翼均以与飞行控制模块相连的伺服电机驱动。
当飞行器飞行时,飞行器自带的机载测量传感器来监测飞行工况,若发生旋翼失效故障,则飞行控制模块通过控制第一旋转机构、第二旋转机构或旋翼处的伺服电机,来调节飞行状态。
本飞行器若只有一个或两个旋翼失效,则飞行器仍可维持飞行并进行货物运送;当发生三个旋翼失效时,则飞行器无法正常飞行,只能维持悬停状态或缓慢落地,此时由于落地冲击力小或可以控制,因此可以减少旋翼失效带来的经济损失。
- 一种高容错率可变形四旋翼飞行器及控制方法
- 一种高容错率可变形四旋翼飞行器