一种双用式继电器
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种继电器,尤其涉及一种双用式继电器。
背景技术
继电器是一种电控制器件,是当输入量的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器,因其在电路中起着自动调节、安全保护、转换电路等作用,成为自动控制领域广泛应用的一种电子元器件。目前在智能电网中,电机式继电器越来越被接受。电机式继电器是一种在控制信号下,利用电机的转动来接通或断开电路,而且控制信号消失后触点仍能保持信号消失前状态的控制元件。
现有技术中的电机式继电器都是利用一个电机来控制一组触点机构的通断,成本相对较高。基于此,本申请中提出了一种利用一个电机控制两组触点机构通断的双用式继电器。
发明内容
本发明实施例的目的在于提供一种双用式继电器,旨在解决背景技术中提出的技术问题。
本发明实施例是这样实现的,一种双用式继电器,包括继电器外壳、接线端子、触点机构和驱动机构,所述继电器外壳内通过触点座安装有两组所述触点机构,继电器外壳的底部安装有对应所述触点机构的接线端子,每组所述触点机构均包括常闭触点、活动触点和常开触点,所述驱动机构上安装有第一摆臂和第二摆臂,所述第一摆臂和第二摆臂分别与两个活动触点连接,所述第一摆臂和第二摆臂用于受驱动机构驱动,带动所述第一摆臂或第二摆臂摆动,以实现对两组所述触点机构的分别控制。
作为本发明进一步的方案:所述驱动机构包括壳体和安装在壳体内的电机,所述电机的输出端上连接有主动蜗杆,主动蜗杆通过安装座安装在壳体内,主动蜗杆与主动蜗轮啮合传动,主动蜗轮上还同轴连接有输入齿轮组,所述输入齿轮组用于带动切换齿轮转动,所述壳体上开设有用于供切换齿轮移动的弧形活动槽,壳体在对应切换齿轮的行程端点位置处分别设有与切换齿轮相配合的第一摆动组件和第二摆动组件,第一摆动组件和第二摆动组件分别用于带动第一摆臂和第二摆臂转动。
作为本发明再进一步的方案:所述第一摆动组件包括输出齿轮,所述输出齿轮与所述切换齿轮啮合传动,输出齿轮的轴端还固定有从动蜗杆,所述从动蜗杆与从动蜗轮啮合传动,从动蜗轮的旋转中心位置处还固定有与第一摆臂配合的方轴,所述第二摆动组件与第一摆动组件结构相同。
作为本发明再进一步的方案:所述输入齿轮组包括两个相互啮合的齿轮,其中一个所述齿轮与主动蜗轮同轴固定,另一个所述齿轮与切换齿轮啮合传动。
作为本发明再进一步的方案:所述壳体上还安装有两个复位旋钮,两个所述复位旋钮分别与两个从动蜗杆连接。
作为本发明再进一步的方案:所述第一摆臂包括一体成型的固定部、让位部和连接部,所述固定部上设有与方轴相配合的方孔,固定部通过让位部与连接部连接,所述连接部上设有与活动触点连接的配合孔。
作为本发明再进一步的方案:所述活动触点铰接在触点座内,活动触点的底部通过弹簧安装在安装孔的内壁上,安装孔设置在触点座内,所述弹簧用于使活动触点与常闭触点保持常接触状态。
与现有技术相比,本发明的有益效果是:继电器内具有两组触点机构,可以同时接入两组控制电路,对两组控制电路进行控制,并且两组触点机构可以通过切换齿轮的作用,来实现分别独立的动力传递,最终实现第一摆臂或第二摆臂的摆动,一器双用,极大了节省了继电器的使用成本。
附图说明
图1为一种双用式继电器的内部结构示意图。
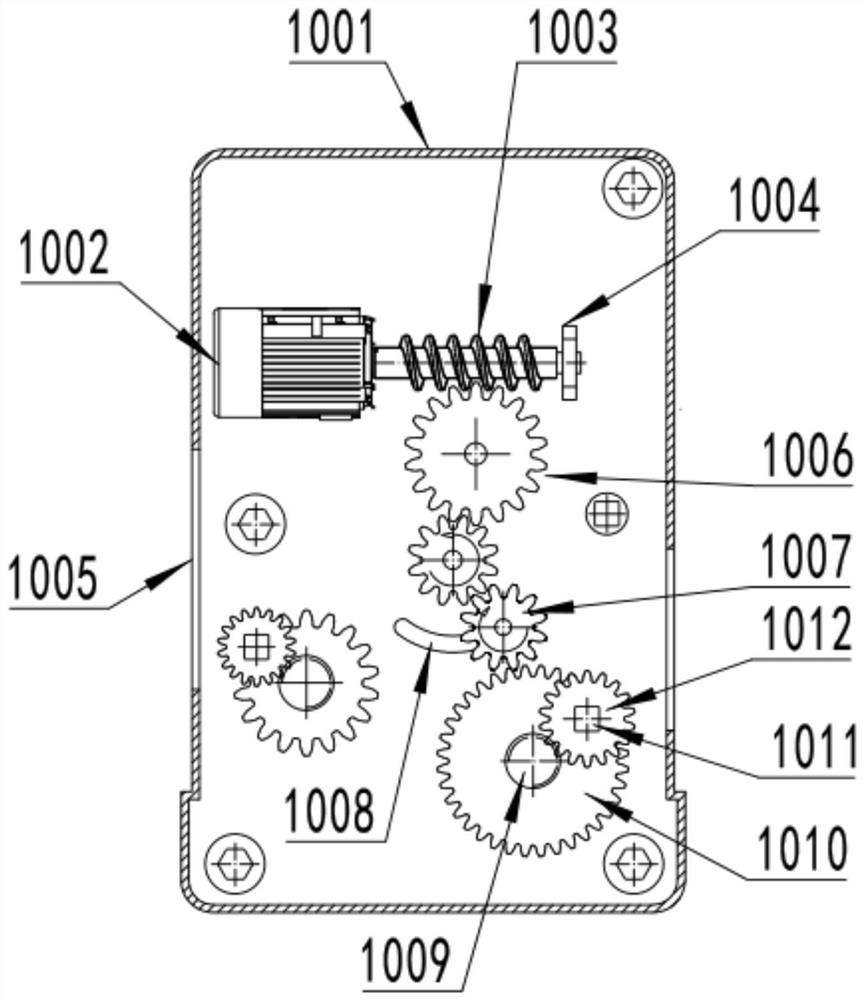
图2为一种双用式继电器中驱动机构的结构示意图(控制第一摆臂时)。
图3为一种双用式继电器中驱动机构的结构示意图(控制第二摆臂时)。
图4为一种双用式继电器的结构示意图。
图5为一种双用式继电器中第一摆臂的结构示意图。
图6为一种双用式继电器中弹簧的连接示意图。
附图中:1-继电器外壳、2-驱动机构端子、3-接线端子、4-触点座、5-常闭触点、6-活动触点、7-常开触点、8-第一摆臂、801-固定部、802-让位部、803-连接部、804-配合孔、9-第二摆臂、10-驱动机构、1001-壳体、1002-电机、1003-主动蜗杆、1004-安装座、1005-活动孔、1006-输入齿轮组、1007-切换齿轮、1008-弧形活动槽、1009-从动蜗杆、1010-输出齿轮、1011-方轴、1012-从动蜗轮、11-复位旋钮、12-弹簧、13-安装孔。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
如图1和4所示,为本发明一个实施例提供的一种双用式继电器的结构图,继电器外壳1、接线端子3、触点机构和驱动机构10,所述继电器外壳1内通过触点座4安装有两组所述触点机构,继电器外壳1的底部安装有对应所述触点机构的接线端子3,每组所述触点机构均包括常闭触点5、活动触点6和常开触点7,所述驱动机构10上安装有第一摆臂8和第二摆臂9,所述第一摆臂8和第二摆臂9分别与两个活动触点6连接,所述第一摆臂8和第二摆臂9用于受驱动机构10驱动,带动所述第一摆臂8或第二摆臂9摆动,以实现对两组所述触点机构的分别控制。
本发明实施例中,继电器内具有两组触点机构,可以同时接入两组控制电路,对两组控制电路进行控制,并且两组触点机构可以由驱动机构10带动第一摆臂8或第二摆臂9摆动,来实现分别控制,极大了节省了继电器的使用成本。
如图2~3所示,作为本发明一个优选的实施例,所述驱动机构10包括壳体1001和安装在壳体1001内的电机1002,所述电机1002的输出端上连接有主动蜗杆1003,主动蜗杆1003通过安装座1004安装在壳体1001内,主动蜗杆1003与主动蜗轮啮合传动,主动蜗轮上还同轴连接有输入齿轮组1006,所述输入齿轮组1006用于带动切换齿轮1007转动,所述壳体1001上开设有用于供切换齿轮1007移动的弧形活动槽1008,壳体1001在对应切换齿轮1007的行程端点位置处分别设有与切换齿轮1007相配合的第一摆动组件和第二摆动组件,第一摆动组件和第二摆动组件分别用于带动第一摆臂8和第二摆臂9转动,搭,当然,壳体1001的对应位置处开设有与第一摆臂8和第二摆臂9配合的活动孔1005。
本发明实施例在实际应用时,电机1002输出动力带动主动蜗杆1003发生转动,主动蜗轮带动输入齿轮组1006同步转动,在齿间的啮合作用下,切换齿轮1007发生转动,此处,切换齿轮1007与第一摆动组件或第二摆动组件发生传动关系,取决于电机1002的转向,从图2和3可以看出,当输入齿轮组1006的输出端以逆时针方向转动时,此时切换齿轮1007处于弧形活动槽1008的右端,即实现对第一摆动组件的动力传递,而当输入齿轮组1006的输出端以顺时针方向转动时,在齿间作用力的作用下,切换齿轮1007向弧形活动槽1008的左端摆动,并实现对第二摆动组件的动力传递。
以输入齿轮组1006的输出端以逆时针方向转动为例,切换齿轮1007带动第一摆动组件发生转动,以实现第一摆臂8的摆动,使得活动触点6发生运动,与常闭触点5脱离接触并与常开触点7接触,实现对电路的切断。
作为优选的,所述输入齿轮组1006包括两个相互啮合的齿轮,其中一个所述齿轮与主动蜗轮同轴固定,另一个所述齿轮与切换齿轮1007啮合传动。
如图2~3所示,作为本发明另一个优选的实施例,所述第一摆动组件包括输出齿轮1010,所述输出齿轮1010与所述切换齿轮1007啮合传动,输出齿轮1010的轴端还固定有从动蜗杆1009,所述从动蜗杆1009与从动蜗轮1012啮合传动,从动蜗轮1012的旋转中心位置处还固定有与第一摆臂8配合的方轴1011,所述第二摆动组件与第一摆动组件结构相同。
本发明实施例中,切换齿轮1007转动时,带动输出齿轮1010转动,从动蜗杆1009会同步转动,进而带动从动蜗轮1012及方轴1011的转动,以实现第一摆臂8的摆动,本实施例中,从动蜗杆1009和从动蜗轮1012的设置目的在于保证电机1002反向转动时,第一摆臂8仍然保证当前状态,避免事故的发生。
如图1所示,作为本发明另一个优选的实施例,所述壳体1001上还安装有两个复位旋钮11,两个所述复位旋钮11分别与两个从动蜗杆1009连接。
本发明实施例中的继电器,在活动触点6与常开触点7接触实现对电路的切断后,需要手动进行复位,复位时,通过转动对应的复位旋钮11,带动对应的从动蜗杆1009转动即可,非常方便。
如图5所示,作为本发明另一个优选的实施例,所述第一摆臂8包括一体成型的固定部801、让位部802和连接部803,所述固定部801上设有与方轴1011相配合的方孔,固定部801通过让位部802与连接部803连接,所述连接部803上设有与活动触点6连接的配合孔804。
本发明实施例中,方孔为与方轴1011相互匹配的,实际应用时,方孔和方轴1011也可以设置成其他形式的,例如三角形、五边形、六边形的,本实施例在此不进行具体的限定。让位部802的设置目的是用于对常闭触点5进行让位,防止第一摆臂8摆动时与常闭触点5发生位置干涉。
如图6所示,作为本发明另一个优选的实施例,所述活动触点6铰接在触点座4内,活动触点6的底部通过弹簧12安装在安装孔13的内壁上,安装孔13设置在触点座4内,所述弹簧12用于使活动触点6与常闭触点5保持常接触状态。
也就是说,在初始状态下,在弹簧12的作用力下,活动触点6会向一侧偏转并与常闭触点5保持接触状态,当电机1002接收到电流脉冲开始转动后,活动触点6才会在第一摆臂8或者第二摆臂9的作用下,与常开触点7接触。
结合上述实施例,易知本发明的工作原理是:正常状态下,活动触点6在弹簧12的作用力下,会向一侧偏转并与常闭触点5保持接触状态,当接收到控制电路的信号后,电机1002输出动力带动主动蜗杆1003发生转动,主动蜗轮带动输入齿轮组1006同步转动,在齿间的啮合作用下,切换齿轮1007发生转动,此处,切换齿轮1007与第一摆动组件或第二摆动组件发生传动关系,取决于电机1002的转向,以输入齿轮组1006的输出端以逆时针方向转动为例,切换齿轮1007带动输出齿轮1010转动,从动蜗杆1009会同步转动,进而带动从动蜗轮1012及方轴1011的转动,以实现第一摆臂8的摆动,从动蜗杆1009和从动蜗轮1012的设置目的在于保证电机1002反向转动时,第一摆臂8仍然保证当前状态,避免事故的发生,此时与该触点机构连接的电路处于并保持在断开状态,可以通过转动对应的复位旋钮11,带动对应的从动蜗杆1009转动,来实现复位。
本发明上述实施例公开了一种双用式继电器,继电器内具有两组触点机构,可以同时接入两组控制电路,对两组控制电路进行控制,并且两组触点机构可以通过切换齿轮1007的作用,来实现分别独立的动力传递,最终实现第一摆臂8或第二摆臂9的摆动,一器双用,极大了节省了继电器的使用成本。
本领域技术人员在考虑说明书及实施例处的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
- 一种替代传统机械继电器的双路插拔式固态继电器
- 双浮子、双接点式气体继电器