一种用于油电混合无人机脚架的自动伸缩装置及方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及无人机自动伸缩脚架技术领域,尤其涉及一种用于油电混合无人机脚架的自动伸缩装置及方法。
背景技术
近年来无人机相关技术在不断的突破与发展,各行各业都会有无人机的应用,随着应用场景的不断被发掘,其使用环境也越来越复杂,如植保无人机在作业时,起飞及降落的场地可能是田埂、杂草堆、沙石地;山区测绘无人机,起飞及降落的场地可能是斜坡、石堆等;这些环境场景在无人机起飞降落中,会极大影响飞行器的飞行安全,甚至导致飞行事故。
因此,如何让无人机在复杂恶劣的起降场地上平稳起飞及降落,且机身部件与地面无磕碰损坏问题是业界亟需解决的技术问题。
发明内容
本发明提供一种用于油电混合无人机脚架的自动伸缩装置及方法,避免无人机降落时因地面凹凸不平导致倾翻或机身磕碰到地面使机体受损,保障无人机降落着陆的安全,减少经济损失。
为实现上述目的,本发明提供了一种用于油电混合无人机脚架的自动伸缩装置,包括机身,包括:
脚架固定座,所述脚架固定座的一端固定在所述机身底部,另一端用于固定一级脚架碳管;
一级脚架碳管,所述一级脚架碳管的一端安装在脚架固定座上,另一端安装有伸缩电机,所述伸缩电机具有可伸缩的电机丝杆,所述电机丝杆用于支撑和缩放二级脚架碳管;
二级脚架碳管,所述二级脚架碳管的外径小于所述一级脚架碳管的内径,其底端固定在脚架三通上,所述二级脚架碳管的底部安装有与所述电机丝杆连接的丝杆轴承,所述二级脚架碳管的两侧开有供所述伸缩电机通过的槽孔;
脚架三通,所述脚架三通用于固定所述二级脚架碳管及脚架横梁碳管;
脚架横梁碳管,所述脚架横梁碳管安装在所述脚架三通上,用于水平支撑脚架并安装激光雷达传感器;
激光雷达传感器,所述激光雷达传感器安装在所述脚架横梁碳管内,用于探测脚架距离地面的高度以及地面平整度;
感应控制电路板,所述感应控制电路板安装在所述机身上,用于接收所述激光雷达传感器传回的探测数据,并根据探测数据分析处理,控制所述伸缩电机的伸缩量;
其中,当无人机降落时,所述激光雷达传感器探测无人机着陆地面是否平整,若探测地面凹凸不平,所述感应控制电路板接收探测数据并作处理分析,控制所述伸缩电机的伸缩量,调整所述二级脚架碳管的高度,使无人机机身水平距离地面处于适宜的高度。
优选的,所述一级脚架碳管的外径小于所述脚架固定座的内径,所述一级脚架碳管的内径大于所述二级脚架碳管的外径。
优选的,所述二级脚架碳管的外径小于所述脚架三通的内径,且所述二级脚架碳管的管体可以全部收纳进一级脚架碳管内。
优选的,所述激光雷达传感器的安装角度和地面相垂直。
优选的,所述伸缩电机、激光雷达传感器及感应控制电路板之间为电连接。
优选的,所述脚架固定座为金属件或者具有预设硬度的塑料件。
优选的,所述脚架固定座通过带有螺纹的螺丝固定在所述机身底部。
优选的,所述一级脚架碳管上设有供所述伸缩电机安装的槽孔。
优选的,所述二级脚架碳管的底部设有供所述丝杆轴承安装的孔位。
本发明还提供一种油电混合无人机脚架的自动伸缩的方法,包括以下步骤:
步骤S01、在油电混合无人机上安装自动伸缩装置;
步骤S02、在无人机起飞前,感应控制电路板自动校准脚架水平度以保持机身水平;
步骤S03、无人机在降落时,激光雷达传感器自动扫描降落区域的地面水平度,并将扫描数据反馈至感应控制电路板进行分析;
步骤S04、感应控制电路板进入分析状态,分析计算当前地面情况是否水平;其中,当所述感应控制电路板分析降落区域地面平坦时,进入步骤S05;当所述感应控制电路板分析降落区域地面凹凸不平时,进入步骤S06;
步骤S05、感应控制电路板控制伸缩电机的伸缩量保持不变,以保持机身水平;
步骤S06、感应控制电路板根据分析计算结果控制伸缩电机的伸缩量以保持机身水平;
步骤S07、无人机平稳着陆。
本发明提供的一种用于油电混合无人机脚架的自动伸缩装置及方法,通过感应控制电路接收激光雷达传感器传回的数据并作分析处理来控制伸缩电机的伸缩量,调整对应脚架高度,从而使无人机机体水平距离地面处于一个合适的高度,避免无人机降落时因地面凹凸不平导致倾翻或机身磕碰到地面,导致机体受损,保障无人机降落着陆的安全,减少经济损失。
附图说明
通过结合附图对本申请实施例进行更详细的描述,本申请的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本申请实施例的进一步理解,并且构成说明书的一部分,与本申请实施例一起用于解释本申请,并不构成对本申请的限制。在附图中,相同的参考标号通常代表相同部件或步骤。附图中:
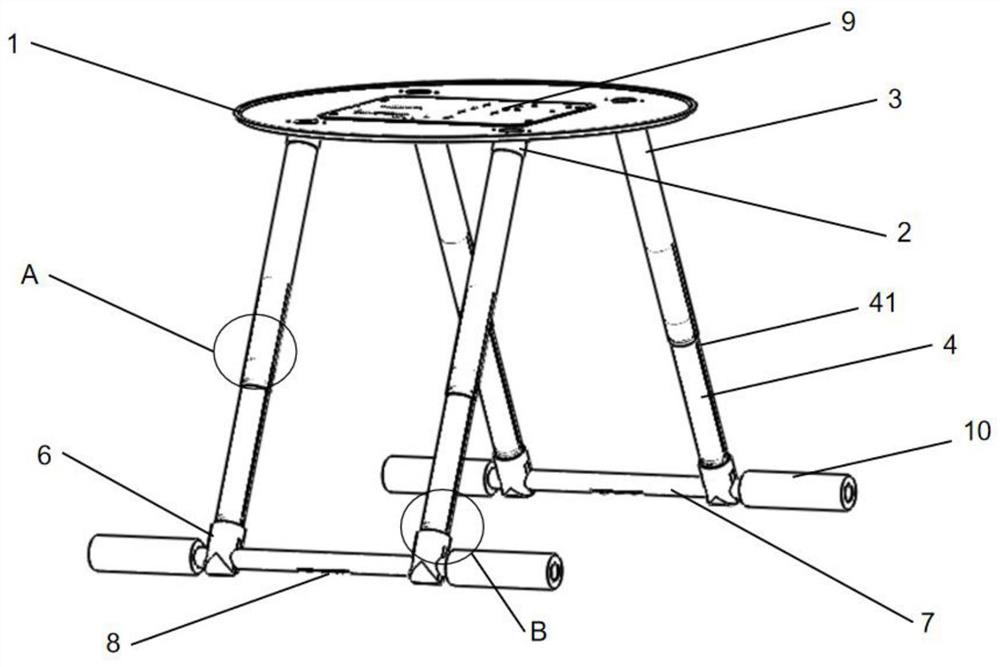
图1为本发明提供的油电混合无人机脚架的自动伸缩装置的结构示意图;
图2为图1中A处局部放大图;
图3为图1中B处局部放大图;
图4为本发明提供的油电混合无人机脚架的自动伸缩装置的结构剖视图;
图5为本发明提供的油电混合无人机脚架的自动伸缩方法的流程图。
附图标记为:
1.机身;2.脚架固定座;3.一级脚架碳管;4.二级脚架碳管;5.伸缩电机;6.脚架三通;7.脚架横梁碳管;8.激光雷达传感器;9.感应控制电路板;10.脚架减震泡棉;11.固定螺丝;41.槽孔;51.电机丝杆;52丝杆轴承。
具体实施方式
下面,将参考附图详细地描述根据本申请的实施例。显然,所描述的实施例仅仅是本申请的一部分实施例,而不是本申请的全部实施例,应理解,本申请不受这里描述的实施例的限制。
如图1-图4所示,本发明提供了一种用于油电混合无人机脚架的自动伸缩装置,包括:机身1、脚架固定座2、一级脚架碳管3、二级脚架碳管4、伸缩电机5、脚架三通6、脚架横梁碳管7、激光雷达传感器8、感应控制电路板9、脚架减震泡棉10、紧固螺丝11、槽孔41、电机丝杆51、丝杆轴承52。
具体的,脚架固定座2的一端固定在机身1底部,另一端用于固定一级脚架碳管3;脚架固定座2为金属件或者具有预设硬度的塑料件,脚架固定座2通过带有螺纹的螺丝固定在机身1底部。
一级脚架碳管3的一端安装在脚架固定座2上,另一端安装有伸缩电机5,伸缩电机5具有可伸缩的电机丝杆51,电机丝杆51用于支撑和缩放二级脚架碳管4。具体的,一级脚架碳管3的外径小于脚架固定座2的内径,一级脚架碳管3的内径大于二级脚架碳管4的外径,一级脚架碳管3上设有供伸缩电机5安装的槽孔。
二级脚架碳管4的外径小于一级脚架碳管3的内径,其底端固定在脚架三通6上,二级脚架碳管4的底部安装有与电机丝杆51连接的丝杆轴承52,二级脚架碳管4的两侧开有供伸缩电机5通过的槽孔41。具体的,二级脚架碳管4的外径小于脚架三通6的内径,且二级脚架碳管4的管体可以全部收纳进一级脚架碳管3内;二级脚架碳管4的底部设有供丝杆轴承52安装的孔位,孔位通过固定螺丝11固定在二级脚架碳管4上。
本实施例中的伸缩控制原理为:伸缩电机5固定在一级脚架碳管3的端部,当二级脚架碳管4需要收起时,伸缩电机5控制电机丝杆51运动,使丝杆轴承52向上运动,以带动二级脚架碳管4收起并容纳在一级脚架碳管3内,二级脚架碳管4的外径小于一级脚架碳管3的内径,且二级脚架碳管4的两侧开有供伸缩电机5通过的槽孔41。当二级脚架碳管4需要伸开时,伸缩电机5控制电机丝杆51运动,使丝杆轴承52向下运动,以带动二级脚架碳管4伸出。
脚架三通6用于固定二级脚架碳管4及脚架横梁碳管7,脚架三通6安装在二级脚架碳管4的底部,脚架三通6水平方向安装脚架横梁碳管7。
脚架横梁碳管7安装在脚架三通6上,用于水平支撑脚架并安装激光雷达传感器8;激光雷达传感器8的安装角度和地面相垂直,激光雷达传感器8用于探测脚架距离地面的高度以及地面平整度。为了降低脚架横梁碳管7降落地面的震感,可在脚架横梁碳管7上安装脚架减震泡棉10,脚架减震泡棉10固定在脚架横梁碳管7的两端。
感应控制电路板9安装在机身1上,用于接收激光雷达传感器8传回的探测数据,并根据探测数据分析处理,控制伸缩电机5的伸缩量。感应控制电路9置放于机身1内部,用于分析激光雷达传感器8传回数据,控制伸缩电机5运动的作用。
本实施例中的伸缩电机5、激光雷达传感器8及感应控制电路板9之间为电连接;供电电源为无人机系统电源,无需单独采用蓄电池或锂电池为其供电。本实施例中的伸缩电机5、激光雷达传感器8、感应控制电路9都需要做防水防尘处理,以防损坏。
本发明的工作原理为:当无人机降落时,激光雷达传感器8探测无人机着陆地面是否平整,若探测地面凹凸不平,感应控制电路板9接收探测数据并作处理分析,控制伸缩电机5的伸缩量,调整二级脚架碳管4的高度,使无人机机身1水平距离地面处于适宜的高度,避免无人机降落时因地面凹凸不平导致倾翻或机身磕碰到地面。
如图5所示,本发明还提供一种油电混合无人机脚架的自动伸缩方法,包括以下步骤:
步骤S01、在油电混合无人机上安装自动伸缩装置;
步骤S02、在无人机起飞前,感应控制电路板9自动校准脚架水平度以保持机身1水平;
步骤S03、无人机在降落时,激光雷达传感器8自动扫描降落区域的地面水平度,并将扫描数据反馈至感应控制电路板9进行分析;
步骤S04、感应控制电路板9进入分析状态,分析计算当前地面情况是否水平;其中,当感应控制电路板9分析降落区域地面平坦时,进入步骤S05;当感应控制电路板9分析降落区域地面凹凸不平时,进入步骤S06;
步骤S05、感应控制电路板9控制伸缩电机5的伸缩量保持不变,以保持机身水平;
步骤S06、感应控制电路板9根据分析计算结果控制伸缩电机5的伸缩量以保持机身水平;
步骤S07、无人机平稳着陆。
综上所述,本发明提供的一种用于油电混合无人机脚架的自动伸缩装置及方法,通过感应控制电路接收激光雷达传感器传回的数据并作分析处理来控制伸缩电机的伸缩量,调整对应脚架高度,从而使无人机机体水平距离地面处于一个合适的高度,避免无人机降落时因地面凹凸不平导致倾翻或机身磕碰到地面,导致机体受损,保障无人机降落着陆的安全,减少经济损失。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡是依照本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种用于油电混合无人机脚架的自动伸缩装置及方法
- 一种用于油电混合无人机脚架的自动伸缩装置