一种城市救援用无人机及其使用方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于无人机技术领域,具体涉及一种城市救援用无人机及其使用方法。
背景技术
无人机经过了几十年的发展历程,从技术角度看已经比较成熟。其优点是成本低,具有高度灵活性,能够携带一些重要的设备从空中完成特殊任务,比如空中检测,空中监视,空中传信,空中喊话,紧急救援等;在执行特殊任务时,一般不会造成人员伤亡,生存能力强,机动性能好,实用方便,在处理自然灾害、事故灾难以及社会安全事件等方面能发挥出重要作用。
然而,为了让无人机更加智能,减少其使用难度,提高其工作效率,越来越多的传感器和处理芯片被搭载在无人机上面,以使其功能更加完善,更加智能地完成特殊任务。其中,无人机搭载摄像头传感器,由于计算机视觉理论和工程应用方面的发展,为无人机的智能化,提供一高空救援的难度大,危险性高,因此,高空救援工作一直是困扰世界各国的社会难题。
例如,当楼层爆炸或失火等高空危险事故发生时,由于事故往往是突发的且危险性持续扩大蔓延,因此,处于火灾楼层或火灾楼层之上楼层的人员往往受困于楼层中,无法转移到下方安全的楼层。这种情况下,现有技术中,受困人员通常只能躲避在相对封闭的空间以远离火势,或者逃到天台等待救援,然而,当楼梯无法通行或天台楼层不通时,则受困人员只能困于原地,无法通过其它渠道进行自救,为等待救援和安全脱险赢得时间。
例如,在遇到有人跳楼轻生或者有人即将从高处掉落时,地面条件大部分情况无法放置缓冲气垫,或者即使放置有缓冲气垫,从高处掉落还是有很大的生命危险。
公开号为CN110901918A的专利公开了一种大载荷无人机的高空救援装置,包括支撑板、气垫床、支撑杆、救生网、电动推杆,所述支撑板与无人机机身通过螺杆连接固定,位于无人机上方;所述气垫床位于支撑板上方,用于承载被救援人员;所述电动推杆,一端连接在无人机机臂上,另外一端连接在支撑杆上,用于控制支撑杆的运动,从而达到张开、闭合救生网的效果,这样,在不使用的情况下关闭,整体面积更小,方便运输,利用此高空救援装置与大载重无人机相配合,能够突破特殊场地和复杂环境的限制,快速响应高空救援需求,将被救人员逐一运送至地面,大大地提高了救援工作的效率。但是,仍然存在下列问题:
1.现有城市高空救援无人机不能够在紧靠高楼外墙的条件下对高空待救援人员进行救援;
2.现有城市高空救援无人机不能够将救援网快速牢固地固定在高楼外墙,待救援人员的安全无法得到保障;
3.被救援人员掉落到救援网时,与现有城市高空救援无人机直接接触,人员可能会受伤,也可能会对无人机造成破坏,安全性低和实用性不足;
发明内容
针对现有技术中存在的上述不足之处,本发明提供了一种城市救援用无人机,用以解决现有城市高空救援无人机不能够在紧靠高楼外墙的条件下对高空待救援人员进行救援、现有城市高空救援无人机不能够将救援网快速牢固地固定在高楼外墙,待救援人员的安全无法得到保障、以及,被救援人员掉落到救援网时,与现有城市高空救援无人机直接接触,人员可能会受伤,也可能会对无人机造成破坏,安全性低和实用性不足等问题,本发明还提供了该无人机的使用方法。
为了解决上述技术问题,本发明采用了如下技术方案:
一种城市救援用无人机,包括两个飞行器、救援网、连接装置和两个固定装置,两个所述飞行器通过所述连接装置连接,所述救援网为矩形网,两个所述固定装置分别固定于所述救援网前端的两个端点处,且两个所述固定装置分别置于两个所述飞行器内部,所述救援网后端两个端点分别固定在两个所述飞行器下端,救援工作时,两个所述固定装置固定在高楼外墙表面;
所述固定装置包括动力单元、支撑单元、钻杆和膨胀螺栓,所述动力单元安装于所述支撑单元后端,所述钻杆和膨胀螺栓均置于所述动力单元内部,救援工作时,所述支撑单元前端嵌入高楼外墙表面,所述钻杆通过所述动力单元在高楼外墙表面钻出钻孔,所述膨胀螺栓前端通过所述动力单元置于所述钻孔中,且所述膨胀螺栓前端与高楼外墙可拆卸连接,所述膨胀螺栓后端与所述动力单元连接。
将所述救援网前端的两个端点各与一个固定装置连接,将所述救援网的端点通过所述网槽与所述外壳连接,再将两个所述固定装置分别放入两个飞行器内部,将所述救援网后端两个端点分别固定在两个所述飞行器下端,此时,两个飞行器处于分离状态,所述救援网悬挂于两个飞行器之间;
所述飞行器飞行到待救援人员下方,所述固定装置携带所述救援网从飞行器中喷出,所述固定装置将所述救援网两个前端点固定在高楼外墙表面,此时所述支撑单元前端嵌入高楼外墙表面,先通过动力单元和钻杆在高楼外墙表面钻出两个钻孔,两个钻孔的孔深均大于20厘米,孔内直径径大于30毫米,再通过动力单元将膨胀螺栓前端固定在钻孔中,单个膨胀螺栓在孔内受到的最大静摩擦力大于5000牛米,以保证所述救援网在受到待救援人员冲击时,所述膨胀螺栓不会从高楼外墙脱落;
当待救援人员掉入到所述救援网中,两个所述飞行器相互靠近并通过所述连接装置连接,使所述救援网后端收缩,所述救援网上方缩小,防止待救援人员从所述救援网上二次掉落,等待救援人员使用云梯等高层接送设备将待救援人员从所述救援网中救出;本发明的无人机能够在紧靠高楼外墙的条件下对高空待救援人员进行救援,同时能够将救援网快速牢固地固定在高楼外墙,确保待救援人员的安全,被救援人员掉落到救援网时,不会与飞行器直接接触,人员不会受伤,也不会对无人机造成破坏,安全性和实用性高。
进一步,动力单元包括外壳、盖板、第一滑动结构、动力结构和第二滑动结构,所述外壳外部设有网槽,救援网通过所述网槽与所述外壳连接,所述盖板与所述外壳可拆卸连接,且所述盖板与所述外壳共同构成动力空间,所述第一滑动结构、动力结构和第二滑动结构均安装于所述动力空间内部,所述动力结构安装在所述第一滑动结构上,钻杆和膨胀螺栓安装在所述第二滑动结构上,所述盖板上设有盖板通孔,所述动力结构与所述盖板通孔在同一直线上,所述第二滑动结构在所述动力结构与所述盖板通孔之间,所述动力结构前端与所述钻杆可拆卸连接,所述动力结构前端与膨胀螺栓可拆卸连接。
所述第一滑动结构带动所述动力结构前后运动,所述第二滑动结构实现钻杆和膨胀螺栓的切换使用,所述动力结构带动钻杆和膨胀螺栓旋转,将膨胀螺栓固定到高楼外墙,同时所述动力单元还起到连接作用,所述动力单元将膨胀螺栓和救援网连接到一起,形成可靠地连接。
进一步,支撑单元包括支撑底座、支撑固定座、第一连接杆、第二连接杆和爪钩,盖板与所述支撑底座后端连接,所述支撑固定座置于所述支撑底座前端,所述支撑底座上设有底座通孔,所述支撑固定座上设有固定座通孔,盖板通孔、底座通孔和固定座通孔在同一直线上,所述爪钩前端嵌入高楼外墙表面,所述爪钩后端通过所述第二连接杆与所述支撑底座活动连接,所述支撑固定座通过所述第一连接杆与所述第二连接杆活动连接。
所述固定装置在飞行器内部时,所述爪钩后端通过所述第二连接杆与所述支撑底座活动连接,能够使爪钩和第二连接杆收缩,节省空间,同时在喷射所述固定装置时,能够减少空气阻力,提高所述固定装置喷射出飞行器的速度,使所述爪钩能够更加容易地嵌入到高楼外墙中,在固定装置离开飞行器后,爪钩和第二连接杆没有收到飞行器的约束,爪钩和第二连接杆自动展开,多个爪钩以较大的面积嵌入到高楼外墙,确保固定装置稳定地嵌入高楼外墙。
进一步,膨胀螺栓包括螺母、螺杆、螺栓、卡扣、膨胀套、套头、扣孔和数个凸台,所述螺母与所述螺杆后端固定连接,所述螺杆前端与所述螺栓螺纹连接,所述螺栓前端的外径大于后端的外径,所述膨胀套套设在所述螺栓前端,所述套头套设在所述螺栓后端,所述膨胀套与所述套头固定连接,所述卡扣设于所述螺栓后端,所述扣孔开设在所述套头上,所述卡扣在所述扣孔内部,所述卡扣在所述扣孔中沿轴向滑动,数个所述凸台均匀设置于所述膨胀套外部。
通过所述动力结构带动所述螺杆旋转,所述螺栓向钻孔外运动,从而通过所述螺栓前端较大的外径使所述膨胀套膨胀,所述凸台增加所述膨胀套与钻孔内壁的摩擦力,使所述膨胀螺栓前端固定在高楼外墙,实现救援网前端两个端点在高楼外墙的固定,稳定可靠,膨胀套在孔内受到的最大静摩擦力大于5000牛米,以保证所述救援网在受到待救援人员冲击时,所述膨胀螺栓不会从高楼外墙脱落,增加了可靠性、安全性和实用性。
进一步,第一滑动结构包括滑动底座、第一滑轨、第一滑块、推杆、气缸连接头、伸缩杆、气缸安装板和气缸,所述第一滑轨安装于所述滑动底座上方,所述第一滑块安装在所述第一滑轨上方并与其滑动连接,所述推杆前端与所述第一滑块固定连接,所述推杆后端通过所述气缸连接头与所述伸缩杆一端连接,所述伸缩杆另一端在所述气缸内部并与其滑动连接,所述气缸通过所述气缸安装板安装在所述滑动底座上。
所述气缸启动,所述气缸带动所述伸缩杆运动,所述第一滑块沿所述第一滑轨方向前后运动,从而实现所述动力结构和所述钻杆或者所述动力结构和膨胀螺栓向前运动,结构简单,稳定可靠,并且精度高,移动的推力大,能够达到固定的要求。
进一步,动力结构包括动力底座、旋转轴、旋转固定座、批头、电机连接头、电机安装板、减速器和电机,所述动力底座安装在第一滑块上,所述旋转固定座安装在所述动力底座上,所述旋转固定座上开设有旋转轴通孔,所述旋转轴穿过所述旋转轴通孔与所述旋转固定座活动连接,所述批头安装在所述旋转轴前端,所述旋转轴后端通过所述电机连接头与所述减速器输出轴连接,所述减速器输入轴与所述电机输出轴连接,所述减速器和电机均通过所述电机安装板安装在所述动力底座上。
所述钻杆或者膨胀螺栓的后端与所述批头连接,所述电机启动,所述电机输出旋转动力,该旋转动力经所述减速器减速增矩后,通过所述旋转轴带动所述钻杆或者膨胀螺栓旋转,结构简单,稳定可靠,并且精度高,所述电机的旋转力经过所述减速器减速增矩后能够更加方便快速的完成固定作业。
进一步,第二滑动结构包括第二滑轨、第二滑块、钻杆通孔和螺栓通孔,所述第二滑轨安装在滑动底座上,所述第二滑块安装在所述第二滑轨上并与其滑动连接,所述钻杆通孔和螺栓通孔均开设在所述第二滑块上,钻杆置于所述钻杆通孔内并与其活动连接,膨胀螺栓置于所述螺栓通孔内并与其活动连接,所述钻杆后端与批头可拆卸连接,所述第二滑块滑动后,膨胀螺栓后端与批头可拆卸连接。
所述第二滑块沿所述第二滑轨方向上下滑动,使所述钻杆或者膨胀螺栓上下运动,实现所述钻杆和膨胀螺栓的切换使用,结构简单,稳定可靠,不易发生故障,使用寿命长。
进一步,所述飞行器包括飞行系统、控制调节系统、机架、视频采集系统和喷网装置,所述飞行系统安装于所述机架上部,所述控制调节系统和视频采集系统均安装在所述机架上,所述喷网装置安装于所述机架下端,且所述飞行系统、机架、所述视频采集系统和喷网装置分别与控制调节系统电线连接,救援工作时,两个所述固定装置同时从两个所述喷网装置中喷出。
通过视频采集系统获取所述飞行器的空中位置及视频信息,所述飞行系统实现飞行器的方向和高度调节,使所述飞行器飞行到待救援人员下方,所述控制调节系统接收和发出操作人员的控制信号,控制所述飞行系统和所述视频采集系统。
进一步,所述连接装置包括子座、母座和支架,所述子座安装于一个飞行器的机架侧端,所述母座通过所述支架安装于另一个飞行器的机架侧端,且所述子座与所述母座可拆卸连接。
通过所述子座与所述母座的可拆卸连接,实现两个飞行器的结合与分离,当待救援人员掉入到所述救援网中,两个所述飞行器相互靠近,所述子座与所述母座连接,使所述救援网后端收缩,所述救援网上方缩小,防止待救援人员从所述救援网上二次掉落,增加了安全性和可靠性。
如上述的一种城市救援用无人机的使用方法,其特征在于,包括以下步骤:
S1,准备工序,将所述救援网前端的两个端点各与一个固定装置连接,将所述救援网的端点通过所述网槽与所述外壳连接,再将两个所述固定装置分别放入两个所述喷网装置内部,将所述救援网后端两个端点分别固定在两个所述飞行器下端,此时,两个飞行器处于分离状态,所述救援网悬挂于两个飞行器之间;
S2,飞行控制及喷射救援网,两个所述飞行器携带所述救援网从地面同时起飞,通过视频采集系统获取所述飞行器的空中位置及视频信息,所述飞行系统实现飞行器的方向和高度调节,使所述飞行器飞行到待救援人员下方,所述固定装置携带所述救援网从所述喷网装置中喷出,所述固定装置将所述救援网两个前端点固定在高楼外墙表面,此时所述爪钩前端嵌入高楼外墙表面;
S3,钻孔,所述第二滑块沿所述第二滑轨方向上下滑动,使所述钻杆与所述旋转轴和所述盖板通孔在同一直线上,所述钻杆后端与所述批头连接,所述电机启动,所述电机输出旋转动力,该旋转动力经所述减速器减速增矩后,通过所述旋转轴带动所述钻杆旋转,所述气缸启动,所述气缸带动所述伸缩杆运动,所述第一滑块沿所述第一滑轨方向前后运动,从而带动所述动力结构和所述钻杆向前运动,所述钻杆依次穿过所述盖板通孔、底座通孔和固定座通孔与高楼外墙接触,并在高楼外墙钻出一个钻孔,然后将所述钻杆收回到所述外壳内部,所述气缸和所述电机关闭;
S4,固定,所述第二滑块再次沿所述第二滑轨方向上下滑动,使所述膨胀螺栓与所述旋转轴和所述盖板通孔在同一直线上,所述膨胀螺栓的螺母与所述批头连接,所述气缸再次启动,所述气缸带动所述伸缩杆运动,所述第一滑块沿所述第一滑轨方向前后运动,从而带动所述动力结构和所述膨胀螺栓向前运动,所述钻杆依次穿过所述盖板通孔、底座通孔和固定座通孔嵌入到高楼外墙的钻孔内;
所述电机再次启动,所述电机输出旋转动力,该旋转动力经所述减速器减速增矩后,通过所述旋转轴带动所述螺杆旋转,所述螺栓向钻孔外运动,从而通过所述螺栓前端较大的外径使所述膨胀套膨胀,所述凸台增加所述膨胀套与钻孔内壁的摩擦力,使所述膨胀螺栓前端固定在高楼外墙,实现救援网前端两个端点在高楼外墙的固定;
S5,保护救援,所述救援网在待救援人员下方展开,当待救援人员掉入到所述救援网中,两个所述飞行器相互靠近,所述子座与所述母座连接,使所述救援网后端收缩,所述救援网上方缩小,防止待救援人员从所述救援网上二次掉落,等待救援人员使用云梯等高层接送设备将待救援人员从所述救援网中救出;
S6,无人机降落,待救援人员从所述救援网中救出后,所述电机启动,带动所述螺杆反向旋转,所述螺栓向钻孔内运动,所述膨胀套收缩,使所述膨胀螺栓与高楼外墙松动,通过第一滑动结构将所述膨胀螺栓从钻孔中抽出,缩回到所述外壳内部,无人机降落到地面。
本发明的方法操作方便,简单易懂,操作人员经过简单的培训,即可熟练掌握;同时,单个膨胀螺栓在孔内受到的最大静摩擦力大于5000牛米,一个标准体重的成年男性从10米高度掉落到所述救援网中,所述救援网在受到待救援人员冲击时,所述膨胀螺栓不会从高楼外墙脱落,本方法操作简单,稳定可靠,两个所述飞行器还能够独立工作,提高本发明的可操作性。
本发明与现有技术相比,具有如下有益效果:
本发明的无人机能够在紧靠高楼外墙的条件下对高空待救援人员进行救援,同时能够将救援网快速牢固地固定在高楼外墙,确保待救援人员的安全,被救援人员掉落到救援网时,不会与飞行器直接接触,人员不会受伤,也不会对无人机造成破坏,安全性和实用性高。
本发明的方法操作方便,简单易懂,操作人员经过简单的培训,即可熟练掌握;同时,单个膨胀螺栓在孔内受到的最大静摩擦力大于5000牛米,一个标准体重的成年男性从10米高度掉落到所述救援网中,所述救援网在受到待救援人员冲击时,所述膨胀螺栓不会从高楼外墙脱落,本方法操作简单,稳定可靠,两个所述飞行器还能够独立工作,提高本发明的可操作性。
附图说明
图1为本发明一种城市救援用无人机实施例的正视结构示意图(工作状态一);
图2为本发明一种城市救援用无人机实施例的立体结构示意图(工作状态二);
图3为图2中A处的局部放大结构示意图;
图4为本发明一种城市救援用无人机实施例中动力单元的剖视结构示意图;
图5为本发明一种城市救援用无人机实施例中动力单元的立体结构示意图(去除外壳);
图6为本发明一种城市救援用无人机实施例的俯视结构示意图(工作状态二);
图7为本发明一种城市救援用无人机实施例中固定装置的剖视结构示意图(工作状态二);
图8为本发明一种城市救援用无人机实施例中膨胀螺栓的立体结构示意图。
说明书附图中的附图标记包括:
飞行系统1、控制调节系统2、机架3、视频采集系统4、救援网5、固定装置6、动力单元61、外壳611、网槽6111、盖板612、盖板通孔6121、第一滑动结构613、滑动底座6131、第一滑轨6132、第一滑块6133、推杆6134、气缸连接头6135、伸缩杆6136、气缸安装板6137、气缸6138、动力结构614、动力底座6141、旋转轴6142、旋转固定座6143、批头6144、电机连接头6145、电机安装板6146、减速器6147、电机6148、第二滑动结构615、第二滑轨6151、第二滑块6152、钻杆通孔6153、螺栓通孔6154、支撑单元62、支撑底座621、支撑固定座622、第一连接杆623、第二连接杆624、爪钩625、钻杆63、膨胀螺栓64、螺母641、螺杆642、螺栓643、卡扣644、膨胀套645、套头646、扣孔647、凸台618、连接装置7、子座71、母座72、支架73、喷网装置8、高楼外墙9。
具体实施方式
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明:
实施例一
如图1-8所示,一种城市救援用无人机,包括两个飞行器、救援网5、连接装置7和两个固定装置6,两个飞行器通过连接装置7连接,救援网5为矩形网,两个固定装置6分别固定于救援网5前端的两个端点处,且两个固定装置6分别置于两个飞行器内部,救援网5后端两个端点分别固定在两个飞行器下端,救援工作时,两个固定装置6固定在高楼外墙9表面;
固定装置6包括动力单元61、支撑单元62、钻杆63和膨胀螺栓64,动力单元61安装于支撑单元62后端,钻杆63和膨胀螺栓64均置于动力单元61内部,救援工作时,支撑单元62前端嵌入高楼外墙9表面,钻杆63通过动力单元61在高楼外墙9表面钻出钻孔,膨胀螺栓64前端通过动力单元61置于钻孔中,且膨胀螺栓64前端与高楼外墙9可拆卸连接,膨胀螺栓64后端与动力单元61连接。
将救援网5前端的两个端点各与一个固定装置6连接,将救援网5的端点通过网槽6111与外壳611连接,再将两个固定装置6分别放入两个飞行器内部,将救援网5后端两个端点分别固定在两个飞行器下端,此时,两个飞行器处于分离状态,救援网5悬挂于两个飞行器之间;
飞行器飞行到待救援人员下方,固定装置6携带救援网5从飞行器中喷出,固定装置6将救援网5两个前端点固定在高楼外墙9表面,此时支撑单元62前端嵌入高楼外墙9表面,先通过动力单元61和钻杆63在高楼外墙9表面钻出两个钻孔,两个钻孔的孔深均大于20厘米,孔内直径径大于30毫米,再通过动力单元61将膨胀螺栓64前端固定在钻孔中,单个膨胀螺栓在孔内受到的最大静摩擦力大于5000牛米,以保证救援网5在受到待救援人员冲击时,膨胀螺栓64不会从高楼外墙9脱落;
当待救援人员掉入到救援网5中,两个飞行器相互靠近并通过连接装置7连接,使救援网5后端收缩,救援网5上方缩小,防止待救援人员从救援网5上二次掉落,等待救援人员使用云梯等高层接送设备将待救援人员从救援网5中救出;本发明的无人机能够在紧靠高楼外墙的条件下对高空待救援人员进行救援,同时能够将救援网5快速牢固地固定在高楼外墙,确保待救援人员的安全,被救援人员掉落到救援网5时,不会与飞行器直接接触,人员不会受伤,也不会对无人机造成破坏,安全性和实用性高。
作为优选方案,动力单元61包括外壳611、盖板612、第一滑动结构613、动力结构614和第二滑动结构615,外壳611外部设有网槽6111,救援网5通过网槽6111与外壳611连接,盖板612与外壳611可拆卸连接,且盖板612与外壳611共同构成动力空间,第一滑动结构613、动力结构614和第二滑动结构615均安装于动力空间内部,动力结构614安装在第一滑动结构613上,钻杆63和膨胀螺栓64安装在第二滑动结构615上,盖板612上设有盖板通孔6121,动力结构614与盖板通孔6121在同一直线上,第二滑动结构615在动力结构614与盖板通孔6121之间,动力结构614前端与钻杆63可拆卸连接,动力结构614前端与膨胀螺栓64可拆卸连接。
第一滑动结构613带动动力结构614前后运动,第二滑动结构615实现钻杆63和膨胀螺栓64的切换使用,动力结构614带动钻杆63和膨胀螺栓64旋转,将膨胀螺栓64固定到高楼外墙,同时动力单元61还起到连接作用,动力单元61将膨胀螺栓64和救援网5连接到一起,形成可靠地连接。
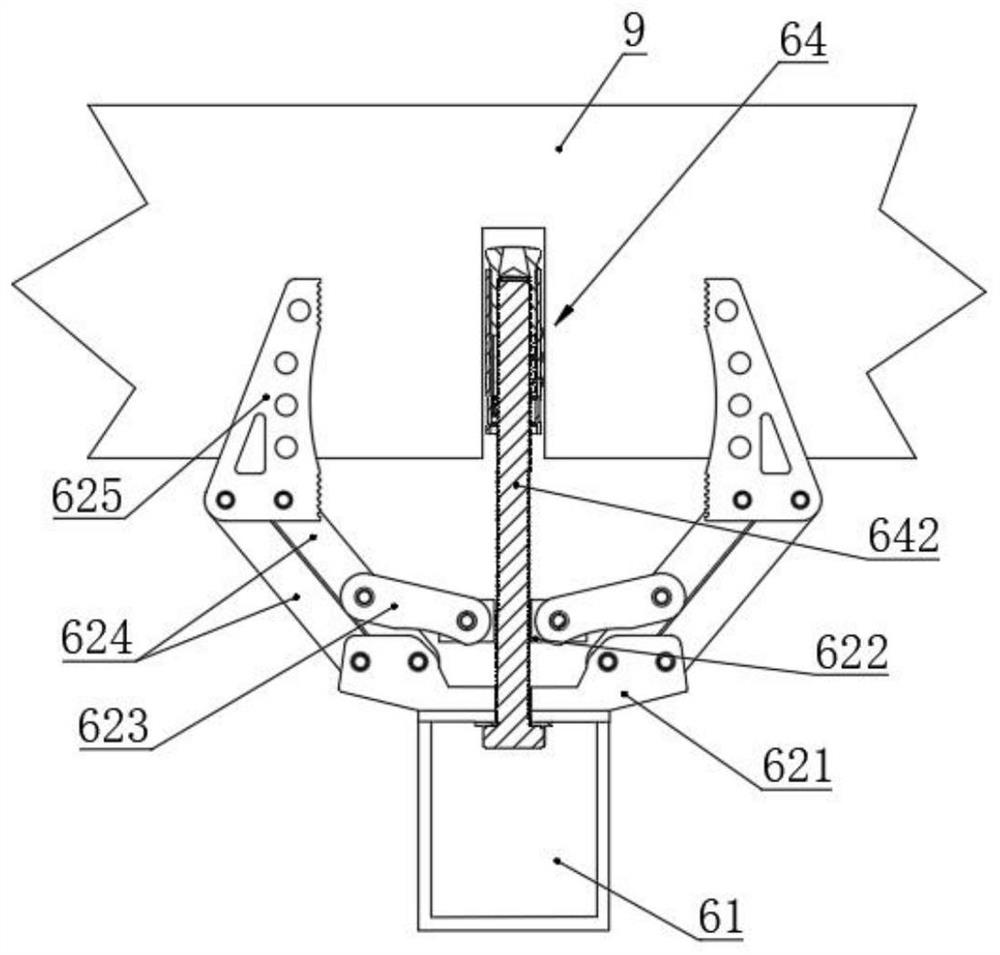
作为优选方案,支撑单元62包括支撑底座621、支撑固定座622、第一连接杆623、第二连接杆624和爪钩625,盖板612与支撑底座621后端连接,支撑固定座622置于支撑底座621前端,支撑底座621上设有底座通孔,支撑固定座622上设有固定座通孔,盖板通孔6121、底座通孔和固定座通孔在同一直线上,爪钩625前端嵌入高楼外墙9表面,爪钩625后端通过第二连接杆624与支撑底座621活动连接,支撑固定座622通过第一连接杆623与第二连接杆624活动连接。
固定装置6在飞行器内部时,爪钩625后端通过第二连接杆624与支撑底座621活动连接,能够使爪钩625和第二连接杆624收缩,节省空间,同时在喷射固定装置6时,能够减少空气阻力,提高固定装置6喷射出飞行器的速度,使爪钩625能够更加容易地嵌入到高楼外墙9中,在固定装置6离开飞行器后,爪钩625和第二连接杆624没有收到飞行器的约束,爪钩625和第二连接杆624自动展开,多个爪钩625以较大的面积嵌入到高楼外墙9,确保固定装置6稳定地嵌入高楼外墙9。
作为优选方案,膨胀螺栓64包括螺母641、螺杆642、螺栓643、卡扣644、膨胀套645、套头646、扣孔647和数个凸台618,螺母641与螺杆642后端固定连接,螺杆642前端与螺栓643螺纹连接,螺栓643前端的外径大于后端的外径,膨胀套645套设在螺栓643前端,套头646套设在螺栓643后端,膨胀套645与套头646固定连接,卡扣644设于螺栓643后端,扣孔647开设在套头646上,卡扣644在扣孔647内部,卡扣644在扣孔647中沿轴向滑动,数个凸台618均匀设置于膨胀套645外部。
通过动力结构614带动螺杆642旋转,螺栓643向钻孔外运动,从而通过螺栓643前端较大的外径使膨胀套645膨胀,凸台618增加膨胀套645与钻孔内壁的摩擦力,使膨胀螺栓64前端固定在高楼外墙9,实现救援网5前端两个端点在高楼外墙9的固定,稳定可靠,膨胀套645在孔内受到的最大静摩擦力大于5000牛米,以保证救援网5在受到待救援人员冲击时,膨胀螺栓64不会从高楼外墙9脱落,增加了可靠性、安全性和实用性。
实施例二
本实施例作为上一实施例的进一步改进,如图1-8所示,一种城市救援用无人机,包括两个飞行器、救援网5、连接装置7和两个固定装置6,两个飞行器通过连接装置7连接,救援网5为矩形网,两个固定装置6分别固定于救援网5前端的两个端点处,且两个固定装置6分别置于两个飞行器内部,救援网5后端两个端点分别固定在两个飞行器下端,救援工作时,两个固定装置6固定在高楼外墙9表面;
固定装置6包括动力单元61、支撑单元62、钻杆63和膨胀螺栓64,动力单元61安装于支撑单元62后端,钻杆63和膨胀螺栓64均置于动力单元61内部,救援工作时,支撑单元62前端嵌入高楼外墙9表面,钻杆63通过动力单元61在高楼外墙9表面钻出钻孔,膨胀螺栓64前端通过动力单元61置于钻孔中,且膨胀螺栓64前端与高楼外墙9可拆卸连接,膨胀螺栓64后端与动力单元61连接。
将救援网5前端的两个端点各与一个固定装置6连接,将救援网5的端点通过网槽6111与外壳611连接,再将两个固定装置6分别放入两个飞行器内部,将救援网5后端两个端点分别固定在两个飞行器下端,此时,两个飞行器处于分离状态,救援网5悬挂于两个飞行器之间;
飞行器飞行到待救援人员下方,固定装置6携带救援网5从飞行器中喷出,固定装置6将救援网5两个前端点固定在高楼外墙9表面,此时支撑单元62前端嵌入高楼外墙9表面,先通过动力单元61和钻杆63在高楼外墙9表面钻出两个钻孔,两个钻孔的孔深均大于20厘米,孔内直径径大于30毫米,再通过动力单元61将膨胀螺栓64前端固定在钻孔中,单个膨胀螺栓在孔内受到的最大静摩擦力大于5000牛米,以保证救援网5在受到待救援人员冲击时,膨胀螺栓64不会从高楼外墙9脱落;
当待救援人员掉入到救援网5中,两个飞行器相互靠近并通过连接装置7连接,使救援网5后端收缩,救援网5上方缩小,防止待救援人员从救援网5上二次掉落,等待救援人员使用云梯等高层接送设备将待救援人员从救援网5中救出;本发明的无人机能够在紧靠高楼外墙的条件下对高空待救援人员进行救援,同时能够将救援网5快速牢固地固定在高楼外墙,确保待救援人员的安全,被救援人员掉落到救援网5时,不会与飞行器直接接触,人员不会受伤,也不会对无人机造成破坏,安全性和实用性高。
作为优选方案,动力单元61包括外壳611、盖板612、第一滑动结构613、动力结构614和第二滑动结构615,外壳611外部设有网槽6111,救援网5通过网槽6111与外壳611连接,盖板612与外壳611可拆卸连接,且盖板612与外壳611共同构成动力空间,第一滑动结构613、动力结构614和第二滑动结构615均安装于动力空间内部,动力结构614安装在第一滑动结构613上,钻杆63和膨胀螺栓64安装在第二滑动结构615上,盖板612上设有盖板通孔6121,动力结构614与盖板通孔6121在同一直线上,第二滑动结构615在动力结构614与盖板通孔6121之间,动力结构614前端与钻杆63可拆卸连接,动力结构614前端与膨胀螺栓64可拆卸连接。
第一滑动结构613带动动力结构614前后运动,第二滑动结构615实现钻杆63和膨胀螺栓64的切换使用,动力结构614带动钻杆63和膨胀螺栓64旋转,将膨胀螺栓64固定到高楼外墙,同时动力单元61还起到连接作用,动力单元61将膨胀螺栓64和救援网5连接到一起,形成可靠地连接。
作为优选方案,支撑单元62包括支撑底座621、支撑固定座622、第一连接杆623、第二连接杆624和爪钩625,盖板612与支撑底座621后端连接,支撑固定座622置于支撑底座621前端,支撑底座621上设有底座通孔,支撑固定座622上设有固定座通孔,盖板通孔6121、底座通孔和固定座通孔在同一直线上,爪钩625前端嵌入高楼外墙9表面,爪钩625后端通过第二连接杆624与支撑底座621活动连接,支撑固定座622通过第一连接杆623与第二连接杆624活动连接。
固定装置6在飞行器内部时,爪钩625后端通过第二连接杆624与支撑底座621活动连接,能够使爪钩625和第二连接杆624收缩,节省空间,同时在喷射固定装置6时,能够减少空气阻力,提高固定装置6喷射出飞行器的速度,使爪钩625能够更加容易地嵌入到高楼外墙9中,在固定装置6离开飞行器后,爪钩625和第二连接杆624没有收到飞行器的约束,爪钩625和第二连接杆624自动展开,多个爪钩625以较大的面积嵌入到高楼外墙9,确保固定装置6稳定地嵌入高楼外墙9。
作为优选方案,膨胀螺栓64包括螺母641、螺杆642、螺栓643、卡扣644、膨胀套645、套头646、扣孔647和数个凸台618,螺母641与螺杆642后端固定连接,螺杆642前端与螺栓643螺纹连接,螺栓643前端的外径大于后端的外径,膨胀套645套设在螺栓643前端,套头646套设在螺栓643后端,膨胀套645与套头646固定连接,卡扣644设于螺栓643后端,扣孔647开设在套头646上,卡扣644在扣孔647内部,卡扣644在扣孔647中沿轴向滑动,数个凸台618均匀设置于膨胀套645外部。
通过动力结构614带动螺杆642旋转,螺栓643向钻孔外运动,从而通过螺栓643前端较大的外径使膨胀套645膨胀,凸台618增加膨胀套645与钻孔内壁的摩擦力,使膨胀螺栓64前端固定在高楼外墙9,实现救援网5前端两个端点在高楼外墙9的固定,稳定可靠,膨胀套645在孔内受到的最大静摩擦力大于5000牛米,以保证救援网5在受到待救援人员冲击时,膨胀螺栓64不会从高楼外墙9脱落,增加了可靠性、安全性和实用性。
作为优选方案,第一滑动结构613包括滑动底座6131、第一滑轨6132、第一滑块6133、推杆6134、气缸连接头6135、伸缩杆6136、气缸安装板6137和气缸6138,第一滑轨6132安装于滑动底座6131上方,第一滑块6133安装在第一滑轨6132上方并与其滑动连接,推杆6134前端与第一滑块6133固定连接,推杆6134后端通过气缸连接头6135与伸缩杆6136一端连接,伸缩杆6136另一端在气缸6138内部并与其滑动连接,气缸6138通过气缸安装板6137安装在滑动底座6131上。
气缸6138启动,气缸6138带动伸缩杆6136运动,第一滑块6133沿第一滑轨6132方向前后运动,从而实现动力结构614和钻杆63或者动力结构614和膨胀螺栓64向前运动,结构简单,稳定可靠,并且精度高,移动的推力大,能够达到固定的要求。
作为优选方案,动力结构614包括动力底座6141、旋转轴6142、旋转固定座6143、批头6144、电机连接头6145、电机安装板6146、减速器6147和电机6148,动力底座6141安装在第一滑块6133上,旋转固定座6143安装在动力底座6141上,旋转固定座6143上开设有旋转轴通孔,旋转轴6142穿过旋转轴通孔与旋转固定座6143活动连接,批头6144安装在旋转轴6142前端,旋转轴6142后端通过电机连接头6145与减速器6147输出轴连接,减速器6147输入轴与电机6148输出轴连接,减速器6147和电机6148均通过电机安装板6146安装在动力底座6141上。
钻杆63或者膨胀螺栓64的后端与批头6144连接,电机6148启动,电机6148输出旋转动力,该旋转动力经减速器6147减速增矩后,通过旋转轴6142带动钻杆63或者膨胀螺栓64旋转,结构简单,稳定可靠,并且精度高,电机6148的旋转力经过减速器减速增矩后能够更加方便快速的完成固定作业。
作为优选方案,第二滑动结构615包括第二滑轨6151、第二滑块6152、钻杆通孔6153和螺栓通孔6154,第二滑轨6151安装在滑动底座6131上,第二滑块6152安装在第二滑轨6151上并与其滑动连接,钻杆通孔6153和螺栓通孔6154均开设在第二滑块6152上,钻杆63置于钻杆通孔6153内并与其活动连接,膨胀螺栓64置于螺栓通孔6154内并与其活动连接,钻杆63后端与批头6144可拆卸连接,第二滑块6152滑动后,膨胀螺栓64后端与批头6144可拆卸连接。
第二滑块6152沿第二滑轨6151方向上下滑动,使钻杆63或者膨胀螺栓64上下运动,实现钻杆63和膨胀螺栓64的切换使用,结构简单,稳定可靠,不易发生故障,使用寿命长。
作为优选方案,飞行器包括飞行系统1、控制调节系统2、机架3、视频采集系统4和喷网装置8,飞行系统1安装于机架3上部,控制调节系统2和视频采集系统4均安装在机架3上,喷网装置8安装于机架3下端,且飞行系统1、机架3、视频采集系统4和喷网装置8分别与控制调节系统2电线连接,救援工作时,两个固定装置6同时从两个喷网装置8中喷出。
通过视频采集系统4获取飞行器的空中位置及视频信息,飞行系统1实现飞行器的方向和高度调节,使飞行器飞行到待救援人员下方,控制调节系统2接收和发出操作人员的控制信号,控制飞行系统1和视频采集系统4。
作为优选方案,连接装置7包括子座71、母座72和支架73,子座71安装于一个飞行器的机架3侧端,母座72通过支架73安装于另一个飞行器的机架3侧端,且子座71与母座72可拆卸连接。
通过子座71与母座72的可拆卸连接,实现两个飞行器的结合与分离,当待救援人员掉入到救援网5中,两个飞行器相互靠近,子座71与母座72连接,使救援网5后端收缩,救援网5上方缩小,防止待救援人员从救援网5上二次掉落,增加了安全性和可靠性。
实施例二相对于实施例一的优点在于:
实施例二中的发明动力结构614的结构简单,稳定可靠,并且精度高,移动的推力大,能够达到固定的要求;电机6148的旋转力经过减速器减速增矩后能够更加方便快速的完成固定作业;实现钻杆63和膨胀螺栓64的切换使用,结构简单,稳定可靠,不易发生故障,使用寿命长;飞行控制方便精确;防止待救援人员从救援网5上二次掉落,增加了安全性和可靠性。
如上述的一种城市救援用无人机的使用方法,其特征在于,包括以下步骤:
S1,准备工序,将救援网5前端的两个端点各与一个固定装置6连接,将救援网5的端点通过网槽6111与外壳611连接,再将两个固定装置6分别放入两个喷网装置8内部,将救援网5后端两个端点分别固定在两个飞行器下端,此时,两个飞行器处于分离状态,救援网5悬挂于两个飞行器之间;
S2,飞行控制及喷射救援网5,两个飞行器携带救援网5从地面同时起飞,通过视频采集系统4获取飞行器的空中位置及视频信息,飞行系统1实现飞行器的方向和高度调节,使飞行器飞行到待救援人员下方,固定装置6携带救援网5从喷网装置8中喷出,固定装置6将救援网5两个前端点固定在高楼外墙9表面,此时爪钩625前端嵌入高楼外墙9表面;
S3,钻孔,第二滑块6152沿第二滑轨6151方向上下滑动,使钻杆63与旋转轴6142和盖板通孔6121在同一直线上,钻杆63后端与批头6144连接,电机6148启动,电机6148输出旋转动力,该旋转动力经减速器6147减速增矩后,通过旋转轴6142带动钻杆63旋转,气缸6138启动,气缸6138带动伸缩杆6136运动,第一滑块6133沿第一滑轨6132方向前后运动,从而带动动力结构614和钻杆63向前运动,钻杆63依次穿过盖板通孔6121、底座通孔和固定座通孔与高楼外墙9接触,并在高楼外墙9钻出一个钻孔,然后将钻杆63收回到外壳611内部,气缸6138和电机6148关闭;
S4,固定,第二滑块6152再次沿第二滑轨6151方向上下滑动,使膨胀螺栓64与旋转轴6142和盖板通孔6121在同一直线上,膨胀螺栓64的螺母641与批头6144连接,气缸6138再次启动,气缸6138带动伸缩杆6136运动,第一滑块6133沿第一滑轨6132方向前后运动,从而带动动力结构614和膨胀螺栓64向前运动,钻杆63依次穿过盖板通孔6121、底座通孔和固定座通孔嵌入到高楼外墙9的钻孔内;
电机6148再次启动,电机6148输出旋转动力,该旋转动力经减速器6147减速增矩后,通过旋转轴6142带动螺杆642旋转,螺栓643向钻孔外运动,从而通过螺栓643前端较大的外径使膨胀套645膨胀,凸台618增加膨胀套645与钻孔内壁的摩擦力,使膨胀螺栓64前端固定在高楼外墙9,实现救援网5前端两个端点在高楼外墙9的固定;
S5,保护救援,救援网5在待救援人员下方展开,当待救援人员掉入到救援网5中,两个飞行器相互靠近,子座71与母座72连接,使救援网5后端收缩,救援网5上方缩小,防止待救援人员从救援网5上二次掉落,等待救援人员使用云梯等高层接送设备将待救援人员从救援网5中救出;
S6,无人机降落,待救援人员从救援网5中救出后,电机6148启动,带动螺杆642反向旋转,螺栓643向钻孔内运动,膨胀套645收缩,使膨胀螺栓64与高楼外墙9松动,通过第一滑动结构613将膨胀螺栓64从钻孔中抽出,缩回到外壳611内部,无人机降落到地面。
本发明的方法操作方便,简单易懂,操作人员经过简单的培训,即可熟练掌握;同时,单个膨胀螺栓在孔内受到的最大静摩擦力大于5000牛米,一个标准体重的成年男性从10米高度掉落到救援网5中,救援网5在受到待救援人员冲击时,膨胀螺栓64不会从高楼外墙9脱落,本方法操作简单,稳定可靠,两个飞行器还能够独立工作,提高本发明的可操作性。
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
- 一种城市救援用无人机及其使用方法
- 一种城市救援用无人机及其使用方法