一种装备无级变速器的多旋翼飞行器
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于飞行器领域,具体涉及一种装备无级变速器的多旋翼飞行器。
背景技术
当前普遍使用的旋翼飞行器主要分为两种:单旋翼飞行器,共轴双旋翼飞行器,异轴双旋翼飞行器和多旋翼飞行器。单旋翼和双旋翼飞行器的飞行姿态控制较为复杂,因此多应用于大型直升机,主要利用内燃机作为动力源。多旋翼飞行器目前在小型飞行器领域,多数利用多个电机作为动力源,直接连接到多个旋翼,电机数量与旋翼数量一致,由于电机的转速控制较为容易,调整也较为迅速,可以方便地调整飞行姿态。在飞行速度要求不高、而飞行姿态要求较为精准的低空、低速的应用中迅速得到了普及。但由于多旋翼飞行器旋翼较多,对应电机较多,且靠对不同旋翼速度控制实现飞行姿态,搭载多个电机的多旋翼飞行器,多个电机的不同控制算法搭建较为复杂,且容易延迟。
现有技术中,内燃机相对于电机驱动续航里程较高,但每个旋翼配置单独的内燃机的情况下,生产制造成本和飞行重量都会大大增加,同时内燃机的动态响应慢于电机,较难满足控制需求,内燃机通常较少应用在多旋翼飞行器中。
发明内容
本发明内容在于提供一种可搭载内燃机,或较大功率的电动机,或两者结合的,动态响应好,姿态控制简便的多旋翼飞行器。
一种装备无级变速器的多旋翼飞行器,所述装备无级变速器的多旋翼飞行器包括:飞行动力源、至少三个旋翼以及至少两个无级变速器,部分旋翼直接或间接连接到所述无级变速器,另外部分的旋翼直接或间接连接到飞行动力源,或者全部旋翼直接或间接连接到所述无级变速器,
所述无级变速器包括第一锥盘轴系、第二锥盘轴系、钢质挠性传动元件、调速机构和加压机构,所述第一锥盘轴系和第二锥盘轴系均包括定锥盘和动锥盘,第一锥盘轴系和第二锥盘轴系之间通过钢质挠性传动元件传递动力,所述钢质挠性传动元件夹持在第一锥盘轴系的定锥盘和动锥盘之间以及第二锥盘轴系的定锥盘和动锥盘之间;所述调速机构用于驱动第一锥盘轴系的动锥盘和/或第二锥盘轴系的动锥盘以实现轴向移动,所述加压机构用于提供钢质挠性传动元件传递扭矩所需的轴向力,所述调速机构包括调速动力源和调速减速机构,所述调速动力源为电机。
作为优选,所述至少三个旋翼中的一部分旋翼直接连接到飞行动力源,并且所述至少三个旋翼中的其余旋翼通过无级变速器间接连接到飞行动力源,其中,所述无级变速器或飞行动力源通过链条链轮、圆柱齿轮、锥齿轮和齿轮轴中的一种或多于一种间接连接到对应的旋翼。
作为优选,所述至少三个旋翼的全部旋翼分别通过无级变速器间接连接到飞行动力源,其中,所述无级变速器通过链条链轮、圆柱齿轮、锥齿轮和齿轮轴中的一种或多于一种间接连接到对应的旋翼。
作为优选,所述无级变速器的速比范围i满足
作为优选,所述钢质挠性传动元件为无级变速链,所述无级变速链由多个链节组成,每个所述链节包含数片链板,链板为片状,每片链板上设置有至少一个通孔,相邻两个链节通过设置于所述通孔中的1根或2根销轴相连接,销轴端部倾斜设置,且与锥盘的锥面相配合。
作为优选,所述无级变速链的最小节距p(单位mm)满足:
作为优选,第一锥盘轴系和/或第二锥盘轴系的定锥盘和动锥盘的锥盘母线均为直线,该直线与第一锥盘轴系和/或第二锥盘轴系的定锥盘和动锥盘的锥盘中心线的夹角为75至83°,优选81°。
作为优选,调速减速机构包括相对设置的两个端面凸轮,每个端面凸轮的端面上设有角度单调变化的滚道,两个端面凸轮的滚道相对布置,并通过滚子连接,两个端面凸轮中的一个端面凸轮通过轴承直接与第一锥盘轴系和/或第二锥盘轴系的动锥盘连接,两个端面凸轮中的另一个端面凸轮通过轴承间接与第一锥盘轴系和/或第二锥盘轴系的定锥盘连接;凸轮滚道的升角,即滚道沿周向的展开与端面凸轮中心线垂直面的夹角,为α,γ为所述无级变速器锥盘的锥面母线与锥盘轴中心线的垂直面的夹角角度;α满足
作为优选,调速减速机构包括滚珠丝杠,滚珠丝杠由一个空心螺杆与一个螺母套设,空心螺杆与螺母分别通过轴承与第一锥盘轴系和/或第二锥盘轴系的定锥盘和动锥盘连接。
作为优选,所述飞行动力源为电机和内燃机中的一种,或者为电机和内燃机的组合。
本发明的效果在于:
1、现有多旋翼飞行器基本没有设置无级变速器,本发明的多旋翼飞行器通过设置无级变速器来减少设置的飞行动力源的数量,使得可降低成本。
2、本发明的多旋翼飞行器可通过控制无级变速器进行变速来实现多旋翼飞行器的转向、前进后退等操作,从而可降低对飞行动力源的控制要求,并且可使多旋翼飞行器整体的控制趋于简单。
3、本发明的多旋翼飞行器可通过设置无级变速器而无中断地自由调节各个旋翼的转速,使得可提高多旋翼飞行器的可靠性。
4、本发明的多旋翼飞行器可应用由于尺寸、重量等原因不方便直接连接各旋翼的内燃机,或者可应用内燃机作为主动力源,同时应用电机作为次级动力源,此外还可利用无级变速器实现各旋翼的转速调节,达到提高续航里程和灵活操控的性能平衡。
5、通过合理设置链条的节距和链条的具体尺寸可以较好地平衡飞行器对于轻量化和系统强度及寿命的要求。
6、特定结构的凸轮加压机构可以根据负载的变化实时调整轴向压力,满足轻量化的同时,提高了传递效率,从而提高了飞行器的续航能力。
7、采用锥盘母线角度的特定设置,结合特定的调速减速机构,可以保证轻量化的同时,能够迅速地调整输出转速,实现飞行姿态的调整,有助于保持飞行的稳定性。
附图说明
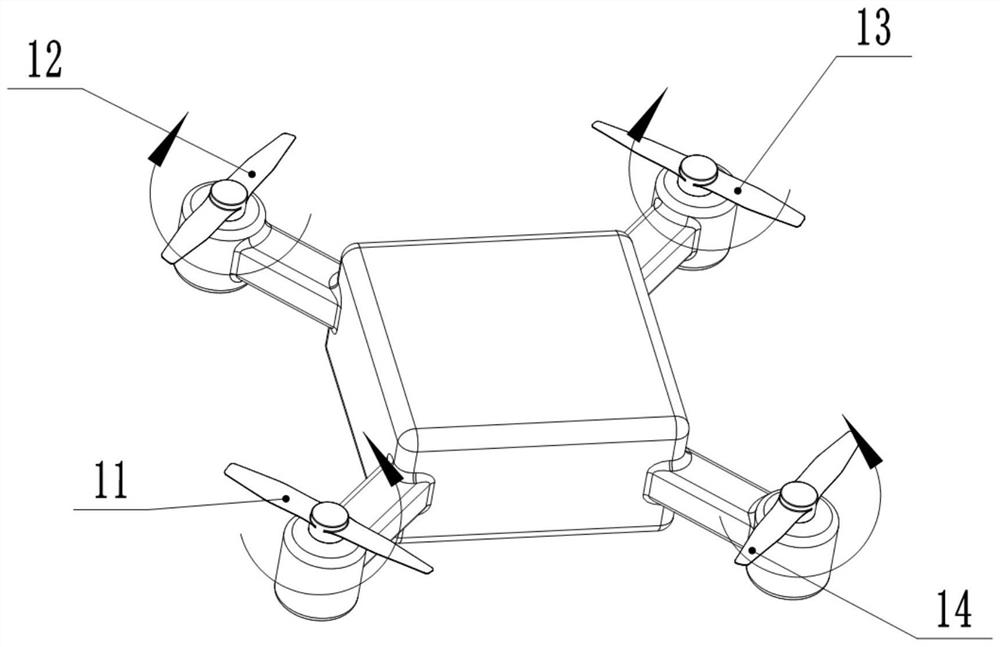
图1是根据本发明的一种实施方式的多旋翼飞行器的透视图。
图2是根据本发明的一种实施方式的多旋翼飞行器的内部结构的透视图。
图3是根据本发明的另一种实施方式的多旋翼飞行器的透视图。
图4是根据本发明的无级变速器结构图。
图5为根据本发明的链条结构图。
图6为根据本发明的调速减速机构端面凸轮结构图。
具体实施方式
根据本发明的实施例的多旋翼飞行器可包括至少一个飞行动力源、至少三个旋翼以及至少两个无级变速器。
根据实施例1、实施例2和实施例3,多旋翼飞行器100包括两个动力源(即,第一飞行动力源51和第二飞行动力源52)、四个旋翼(即,第一旋翼11、第二旋翼12、第三旋翼13和第四旋翼14),每个旋翼的直径均为254mm,以及两个无级变速器(即,第一无级变速器30和第二无级变速器40)。
多旋翼飞行器100的飞行动力源可以是电机和内燃机中的至少一种,根据多旋翼飞行器100的设计要求来选择不同的飞行动力源。本发明的实施例1,第一飞行动力源51和第二飞行动力源52均为电机;本发明的实施例2,第一飞行动力源51为电机,而第二飞行动力源52为内燃机;作为实施例3,第一飞行动力源51和第二飞行动力源52均为内燃机。
根据实施例1、实施例2和实施例3,第一无级变速器30包括该无级变速器的第一锥盘轴系31、第二锥盘轴系32、调速机构315和加压机构312。第二无级变速器40包括该无级变速器的第一锥盘轴系41、第二锥盘轴系42、调速机构315和加压机构312。由于第一无级变速器30和第一无级变速器40结构类似,因此在下文中将以第一无级变速器30为例详细描述应用于本申请的无级变速器的具体结构。
根据实施例1、实施例2和实施例3,第一锥盘轴系31和第二锥盘轴系32均包括定锥盘和动锥盘。第一锥盘轴系31和第二锥盘轴系32之间通过钢质挠性传动元件33传递动力。钢质挠性传动元件33夹持在第一锥盘轴系31的定锥盘和动锥盘之间以及第二锥盘轴系32的定锥盘和动锥盘之间。
根据实施例1、实施例2和实施例3,调速机构用于驱动第一锥盘轴系31的动锥盘和第二锥盘轴系32的动锥盘以实现轴向移动。调速机构包括调速动力源和调速减速机构,调速动力源为电机。调速减速机构包括相对设置的两个端面凸轮,每个端面凸轮的端面上设有角度单调变化的滚道61,两个端面凸轮的滚道61相对布置,并通过滚子连接。两个端面凸轮中的一个端面凸轮通过轴承与动锥盘连接,两个端面凸轮中的另一个端面凸轮通过轴承间接与定锥盘连接。在实施例3中调速减速机构还包括滚珠丝杠,滚珠丝杠由一个空心螺杆与一个螺母套设,空心螺杆与螺母分别通过轴承与定锥盘和动锥盘连接。
具体的无级变速器如图4所示,其中311为输入轴,312为主动轴加压机构,313为主动轴定锥盘,314为主动轴动锥盘,315为调速机构,321为输出轴,322为从动轴定锥盘,323为从动轴动锥盘,324为调速机构,33为钢质挠性传动元件。
加压机构用于提供钢质挠性传动元件33传递扭矩所需的轴向力。
根据实施例1、实施例2和实施例3,钢质挠性传动元件33为无级变速链。实施例的具体设置如图5所示,其中331为链节,332为链板,333为销轴,p为节距。无级变速链由多个链节组成,每个链节包含数片链板,链板为片状,每片链板上设置有2个通孔,相邻两个链节通过设置于通孔中的1根销轴相连接,销轴端部倾斜设置且与锥盘的锥面相配合。无级变速链的最小节距p为4.76mm。
第一锥盘轴系31和第二锥盘轴系32所包括的定锥盘和动锥盘的锥盘母线均为直线,所述锥盘母线与对应锥盘中心线的夹角为81°。
第一无级变速器30和第二无级变速器40的速比范围i均为4,即最大减速比为2,最小减速比为0.5。
以下将详细描述多旋翼飞行器100的总体结构。
实施例1,第一旋翼11直接连接到第一飞行动力源51,并且第四旋翼14通过第一无级变速器30间接连接到第一飞行动力源51。第二旋翼12直接连接到第二飞行动力源52,并且第三旋翼13通过第二无级变速器40间接连接到第二飞行动力源52。如图1和图2中所示,第一旋翼11经由第一无级变速器30的第一锥盘轴系31连接到第一飞行动力源5,并且第二旋翼12经由第二无级变速器40的第一锥盘轴系41连接到第二飞行动力源7,但本发明不限于此。实施例2的第一旋翼11直接连接到其飞行动力源,实施例3的第二旋翼12通过减速机构连接到其飞行动力源,实施例4的第一旋翼11和第二旋翼12两者直接连接到各自的飞行动力源,实施例5的第一旋翼11和第二旋翼12通过减速机构连接到各自的飞行动力源。
在其它的实施方式中,第一旋翼11至第四旋翼14可直接连接到对应的飞行动力源或无级变速器,也可如图中所示通过传动元件50间接连接到对应的飞行动力源或无级变速器,传动元件50为链传动。
根据实施例1,如图1所示,第一旋翼11和第四旋翼14具有相同的旋转方向,第二旋翼12第三旋翼13可具有相同的旋转方向,并且第一旋翼11和第四旋翼14的旋转方向与二旋翼12第三旋翼13的转方向相反。
图3是根据本发明的实施例6的多旋翼飞行器200的透视图。
根据实施例6的多旋翼飞行器200与实施例1的多旋翼飞行器100的区别在于:多旋翼飞行器200的全部旋翼均通过无级变速器间接连接到飞行动力源。具体而言,第一旋翼11通过第一无级变速器21和链轮间接连接到飞行动力源53,第二旋翼12通过第二无级变速器22、一次齿轮传动和链轮间接连接到飞行动力源53,第三旋翼13通过第三无级变速器23、一次齿轮传动和链轮间接连接到飞行动力源53,并且第四旋翼14通过第四无级变速器24和链轮间接连接到飞行动力源53。所述第一旋翼11和第四旋翼14通过飞行动力源53间接连接中间齿轮传动次数为n
在这种情况下,多旋翼飞行器200中仅使用一个飞行动力源53来驱动多个旋翼,这要求飞行动力源53具有较大的功率,同时还要求多旋翼飞行器整体尺寸和整体重量最优化。因此,在这种情况下,实施例6使用内燃机作为飞行动力源53,以在实现大输出功率的情况下更易于优化多旋翼飞行器的整体布置和重量。
- 一种装备无级变速器的多旋翼飞行器
- 一种装备无级变速器的多旋翼飞行器