无人飞行器舵片驱动电机的温控保护系统
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及无人飞行器系统,尤其涉及一种无人飞行器舵片驱动电机的温控保护系统。
背景技术
随着无人机发展,对涡喷式的发动机在无人机中的运用越发重要。涡喷推进式的发动机带来的高温的处理方式关系到无人机的控制系统的可靠性、安全性,如何更好的处理涡喷推进式无人机的发动机高温问题十分值得重视。
发明内容
本发明的目的是提供一种能更好的处理无人飞行器舵片驱动电机的温控保护系统,让其隔热效果更好,以防止高温对电机的损坏。
为了实现上述目的,本申请提供了无人飞行器舵片驱动电机的温控保护系统,无人飞行器舵片驱动电机的温控保护系统,包括:
主控系统,上述主控系统包含处理模块、反馈信号接收模块和控制平台通信模块,上述处理模块根据反馈信号接收模块接收到的反馈信号和控制平台通信模块接收的控制信号生成控制指令;
推进系统,上述推进系统包含涡喷推进单元,上述涡喷推进单元主要由发动机和相应的发动机控制电路所组成,上述发动机控制电路根据上述飞行控制指令中的相关指令控制对应发动机运行;
舵系统,上述舵系统包含舵机,上述舵机主要由舵片和相应的舵片驱动电机、舵片驱动传动机构和舵片驱动控制电路所组成,上述舵片驱动控制电路根据上述无人飞行器飞行控制指令中的相关指令控制对应一个舵片驱动电机运行并通过舵片驱动传动机构使对应舵片转动;
反馈系统,上述反馈系统包含用于获得生成上述飞行控制指令所需的飞行状况的传感器,上述传感器将获得的检测信号作为上述反馈信号发送至上述反馈信号接收模块并通过该反馈信号接收模块发送至处理模块进行处理;
上述舵片驱动传动机构包含至少一条由多个串联或并联的传动部件形成的热传导隔热路径,每个上述热传导隔热路径包含至少两个由传动部件之间的连接形成的隔热连接节点,至少有两个隔热连接节点包含有设置于相邻传动部件之间的隔热件;上述热传导隔热路径一端为舵片,另一端为舵片驱动电机。
这样通过设置多个隔热的连接节点,分级的降温结构,这很好了保障了在从喷管处传递到舵片驱动电机的热量能较好的减弱,使舵片驱动电机在涡喷发动机上也依然能很高效、顺利的运行。
进一步地是,上述热传导隔热路径包含第一热传导隔热路径和第二热传导隔热路径;上述第一热传导隔热路径的一端为舵片,另一端为舵片驱动电机的转轴;上述第二热传导隔热路径的一端为舵片,另一端为舵片驱动电机的外壳。设置两条热传导路线,以尽可能在有限可布置空间中进行散热。
进一步地是,上述第一热传导隔热路径中至少有一个的隔热连接节点与第二热传导隔热路径中的至少一个隔热连接节点连接。
进一步地是,上述第一热传导隔热路径中的传动部件包括依次连接的舵片、舵片固定支架、设置于发动机外壳上的前固定支架;上述舵片与舵片固定支架之间设置有隔热板,上述舵片固定支架与前固定支架之间设置有隔热压片。
进一步地是,上述第二热传导隔热路径中传动部件包括依次连接的舵片、用于控制舵片转动的弯折杆、用于控制弯折杆绕舵片旋转轴摆动的控制连杆、与舵片驱动电机上的丝杆螺纹配合的滑块;上述舵片与弯折杆通过隔热转轴连接,上述弯折杆通过隔热材质的滑动轴承与控制连杆铰接,上述控制连杆与滑块铰接。上述的滑动轴承采用陶瓷轴承。
采用上述的滑块可以直接设置为隔热材质的物件,滑块内与丝杆配合的部分可以设置一个套件,套件与滑块主体固定,套件与丝杆螺纹连接。通过将配合的部件作为隔热部件使用,起到连接的作用时,同时起到隔热作用。这里的隔热材质可以是高硅氧隔热材料。
进一步地是,上述第一热传导隔热路径中的传动部件包括依次连接的舵片、舵片固定支架、设置于发动机外壳上的前固定支架;上述第二热传导隔热路径中传动部件包括依次连接的舵片、用于控制舵片转动的弯折杆、用于控制弯折杆绕舵片旋转轴摆动的控制连杆、与舵片驱动电机上的丝杆螺纹配合的滑块;上述传感器设置于前固定支架上,上述控制连杆上铰接有一延伸杆,上述传感器上设置有用于获取转动信息的、隔热材质的联动件,该延伸杆与该联动件连接,用于使延伸杆可绕该联动件的轴心转动。
进一步地是,无人飞行器舵片驱动电机的温控保护系统还包括位于靠近喷管的、固定在发动机外壳上的套环,上述套环的一侧与舵片固定支架之间夹持上述隔热压片,上述套环的另一侧与前固定支架连接。
进一步地是,上述前固定支架上通过用于隔热的滚珠球轴承连接有电机支架,上述电机支架上设置用于套装在舵片驱动电机外的套筒。这里的滚珠球轴承可以是采用陶瓷轴承。
进一步地是,上述套筒内设置有用于隔热的隔热层。
进一步地是,上述舵片驱动电机上设置有温度传感器,该温度传感器通过上述控制平台通信模块、反馈信号接收模块两者之一或两者与处理模块通信连接,用于将舵片驱动电机的温度反馈于处理模块。
下面结合附图和具体实施方式对本发明做进一步的说明。本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显。或通过本发明的实践了解到。
附图说明
构成本发明的一部分的附图用来辅助对本发明的理解,附图中所提供的内容及其在本发明中有关的说明可用于解释本发明,但不构成对本发明的不当限定。在附图中:
图1为用于说明实施方式中的无人飞行器舵片驱动电机的温控保护系统原理示意图;
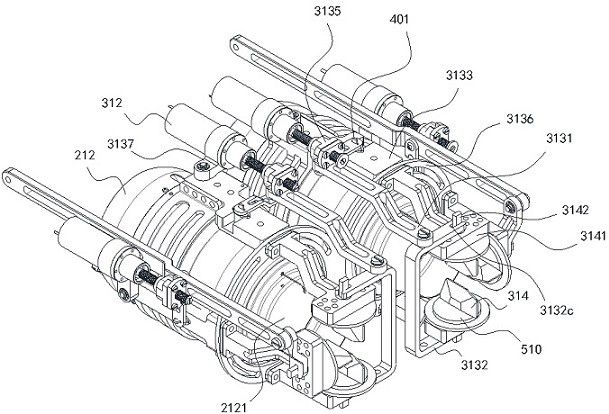
图2为用于说明实施方式中的无人飞行器舵片驱动电机的温控保护系统整体结构示意图;
图3为用于说明实施方式中的无人飞行器舵片驱动电机的温控保护系统俯视部分隔热连接节点的分布示意图;
图4为用于说明实施方式中的无人飞行器舵片驱动电机的温控保护系统俯视部分隔热连接节点的分布示意图;
图5为用于说明实施方式中的无人飞行器舵片驱动电机的温控保护系统的滑块部分的俯视局部示意图;
图6为用于说明实施方式中的无人飞行器舵片驱动电机的温控保护系统热传递路径示意图。
具体实施方式
下面结合附图对本发明进行清楚、完整的说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。在结合附图对本发明进行说明前,需要特别指出的是:
本发明中在包括下述说明在内的各部分中所提供的技术方案和技术特征,在不冲突的情况下,这些技术方案和技术特征可以相互组合。
此外,下述说明中涉及到的本发明的实施例通常仅是本发明一分部的实施例,而不是全部的实施例。因此,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
关于本发明中术语和单位。本发明的说明书和权利要求书及有关的部分中的术语“包括”以及它的任何变形,意图在于覆盖不排他的包含。
参照图1至6,本实施方式采用双发动机的无人飞行器发动机212的控制系统进行实施方式说明,本无人飞行器发动机212的控制系统,包括主控系统100、推进系统200、舵系统300和反馈系统400。
上述主控系统100包含处理模块110、反馈信号接收模块120和控制平台通信模块130,上述处理模块110根据反馈信号接收模块120接收到的反馈信号和/或控制平台通信模块130接收的控制信号生成飞行控制指令。
处理模块110可以采用满足使用要求的各种市售控制器。上述控制平台通信模块130可以采用无线通信装置与反馈系统400进行无线通信。
推进系统200包含涡喷推进单元210,上述涡喷推进单元210主要由一个发动机212和相应的发动机212控制电路211所组成,上述发动机212控制电路211根据上述飞行控制指令中的相关指令控制对应一个发动机212运行。
上述舵系统300包含舵机310,上述舵机310主要由一个舵片314和相应的舵片驱动电机312、舵片驱动传动机构313和舵片314驱动控制电路311所组成,上述舵片314驱动控制电路311根据上述无人飞行器飞行控制指令中的相关指令控制对应一个舵片驱动电机312运行并通过舵片驱动传动机构313使对应一个舵片314转动。
上述反馈系统400包含用于获得生成上述飞行控制指令所需的飞行状况的传感器,上述传感器将获得的测量信号作为上述反馈信号发送至上述反馈信号接收模块120并通过该反馈信号接收模块120发送至处理模块110进行处理;
上述舵片驱动传动机构313包含至少一条由多个串联或并联的传动部件形成的热传导隔热路径,每个上述热传导隔热路径包含至少两个由传动部件之间的连接形成的隔热连接节点H,至少有两个隔热连接节点H包含有设置于相邻传动部件之间的隔热件;上述热传导隔热路径一端为舵片314,另一端为舵片驱动电机312。
上述的反馈系统400的传感器包含有角位移传感器410和温度传感器490,除了角位移传感器410和温度传感器490以外,该反馈系统400的传感器还可以包含磁阻传感器420、气压传感器430、空速传感器440、GPS传感器450、超声测距模块460、视觉传感器470中和惯性测量单元480的至少一种。
这样通过设置多个隔热的连接节点,不仅是为了方便舵系统的灵活控制,同时多个隔热的连接节点也起到对传递的热量进行分梯次的降温,即在连接节点上设置隔热材质的、具有隔热构造的隔热件在连接节点上进行降温,即保障了舵系统的依然具有可靠的指控效能,不受多余部件的影响,同时也形成了分梯次。分级的降温结构,这很好了保障了在从喷管2121处传递到舵片驱动电机312的热量能较好的减弱,使舵片驱动电机312在涡喷发动机上也依然能很高、顺利的运行。
热传导隔热路径包含第一热传导隔热路径P1和第二热传导隔热路径P2;上述第一热传导隔热路径P1的一端为舵片314,另一端为舵片驱动电机312的转轴;上述第二热传导隔热路径P2的一端为舵片314,另一端为舵片驱动电机312的外壳。通过设置两条热传导路线,以尽可能在有限可布置空间中进行散热。舵片314的背离喷管2121的一侧即可设置一隔热板510。
第一热传导隔热路径P1中至少有一个的隔热连接节点H与第二热传导隔热路径P2中的至少一个隔热连接节点H连接,本实施方式中采用在舵片314端与第一热传导隔热路径P1的中间段各设置一个连接第一热传导隔热路径P1和第二热传导隔热路径P2的隔热连接节点H。这样在以让两条热传导路线上的传动部件形成一整体的散热、隔热网,让隔热连接节点H上的传动部件不至于温度过于集中。
第一热传导隔热路径P1中的传动部件包括依次连接的舵片314、舵片固定架3141、设置于发动机外壳上的前固定支架3133;舵片314与舵片固定架3141之间设置的隔热板510与舵片固定架3141固定,上述舵片固定架3141与前固定支架3133之间设置有隔热压片520。通过夹持和螺栓的方式,将上述的隔热压片520固定。
第二热传导隔热路径P2中传动部件包括依次连接的舵片314、用于控制舵片314转动的弯折杆3132、用于控制弯折杆3132绕舵片314的旋转轴摆动的控制连杆3131、与舵片驱动电机312上的丝杆螺纹配合的滑块3135;上述舵片314与弯折杆3132通过隔热转轴连接,上述弯折杆3132通过隔热材质的滑动轴承560与控制连杆3131铰接,上述控制连杆3131与滑块3135铰接。隔热转轴的上端可以设置为扁平状的突出件3142,弯折杆3132设置卡槽3132c,隔热转轴的上端的突出件3142嵌入于该卡槽3132c中。
采用上述的滑块3135可以直接设置为隔热材质的物件,滑块3135内与丝杆配合的部分可以设置一个套件530,套件530与滑块3135主体固定,套件530与丝杆螺纹连接。通过将配合的部件作为隔热部件使用,起到连接的作用时,同时起到隔热作用。
第一热传导隔热路径P1中的传动部件包括依次连接的舵片314、舵片固定架3141、设置于发动机外壳上的前固定支架3133;上述第二热传导隔热路径P2中传动部件包括依次连接的舵片314、用于控制舵片314转动的弯折杆3132、用于控制弯折杆3132绕舵片314旋转轴摆动的控制连杆3131、与舵片驱动电机312上的丝杆螺纹配合的滑块3135;上述传感器设置于前固定支架3133上,上述控制连杆3131上铰接有一延伸杆3134,上述传感器上设置有用于获取转动信息的、隔热材质的联动件401,该延伸杆3134与该联动件401连接,用于使延伸杆3134可绕该联动件401的轴心转动。在实践中,经过热传导隔热路径前端的多级隔热后,这里的延伸杆3134与联动件401的连接节点的温度一般就已经只会在120℃左右,起到了很好的隔热左右。
无人飞行器舵片驱动电机312的温控保护系统还包括位于靠近喷管2121的、固定在发动机外壳上的套环3136,上述套环3136的一侧与舵片固定架3141之间夹持上述隔热压片520,上述套环3136的另一侧与前固定支架3133连接。这里的隔热压片520选用的可耐850℃以上的材质。
通过采用设置的套环3136将舵片固定架3141与前固定支架3133相隔开,是套环3136与隔热压片520一起作用,隔热的同时套环3136作为散热部件进行散热。
上述前固定支架3133上通过用于隔热的滚珠球轴承540连接有电机支架3137,上述电机支架3137上设置用于套装在舵片驱动电机312外的套筒550。在活动连接部件中,滚珠球轴承540作为隔热结构部件,隔热效果较好。
上述套筒550内设置有用于隔热的隔热层。采用在电机外壳上设置一层隔热层,对电机隔热保护的进一步强化。在延伸杆3134与联动件401的连接节点的已经降至120℃左右时,再在电机外壳上设置具有隔热作用的套筒550和电机支架3137,让温度甚至可以降至常温,很好的保护的电机,使电机能安全、可靠的在涡喷发动机上工作。
这里的隔热压片520,隔热板510,联动件401,舵片314上的突出件3142均采用高硅氧隔热材料。
上述舵片驱动电机312上设置有温度传感器490,该温度传感器490通过上述控制平台通信模块130、反馈信号接收模块120与处理模块110通信连接,用于将舵片驱动电机312的温度反馈于处理模块110。
采用本无人飞行器舵片驱动电机的温控保护系统,通过多个连接节点的多级梯次隔热,将温度从舵片端逐渐降温,保障了舵片驱动电机312的稳定和安全的运行,保障了整个舵系统300的可靠运转。
以上对本发明的有关内容进行了说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。基于本发明的上述内容,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
- 无人飞行器舵片驱动电机的温控保护系统
- 无人飞行器舵片驱动电机的温控保护系统