一种可实现多星顺序释放的锁紧分离机构及其工作方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于航天技术领域,尤其是涉及一种可实现多星顺序释放的锁紧分离机构及其工作方法。
背景技术
近年来,随着微纳技术、集成化综合电子技术等的发展以及卫星设计思路的创新,卫星小型化成为未来卫星发展的必然趋势。而新型立方体卫星在搭载一定的负载时,其质量和体积相比其他形状的卫星均较小。传统的卫星锁紧分离机构多采用火工机构,火工机构如爆炸螺栓释放过程中产生的巨大冲击力会对微小卫星产生巨大的冲击损伤,同时火工品对存储环境提出了比较高的要求,并且会造成太空环境的污染。尤其近年来航天领域一箭多星发射方式逐渐发展,传统的卫星锁紧分离机构已不再适用,因此有必要设计一种适用于多卫星的锁紧分离机构。
发明内容
有鉴于此,本发明旨在提出一种可实现多星顺序释放的锁紧分离机构及其工作方法,结构简单、能源消耗小、便于安装存储、可以实现多颗卫星的逐个分离。
为达到上述目的,本发明的技术方案是这样实现的:
一种可实现多星顺序释放的锁紧分离机构,包括卫星组、锁紧组件和分离组件,所述卫星组包括若干卫星本体,所述的锁紧组件位于卫星组的上方,所述锁紧组件与基座相连,所述锁紧组件设有两组,且对称地布置在卫星组的对角线处,所述的分离组件设置两组,对称的布置在卫星组的相对两侧,且分离组件的底部与基座固定相连,分离组件的内侧和卫星组相连;所述锁紧组件压紧卫星组,所述分离组件逐个分离卫星本体。
进一步的,所述卫星组还包括运载平台、若干卫星承力杆和若干抗剪锥销,所述运载平台固定在基座上,在每个卫星本体的上端面均布若干销孔,在每个卫星本体的下端面均布若干抗剪锥销,上一个卫星本体下端面的抗剪锥销与下一个卫星的上端面的销孔一一配合;在每个卫星本体的每个边角处均布置有与卫星承力杆固连的孔位,在每个卫星本体的四周固连有与分离组件连接的球形结构;
在运载平台上设有若干销孔,最下层的卫星本体通过抗剪锥销定位在运载平台上;卫星承力杆的上端为变直径的圆柱状结构,下端为变直径的圆柱筒状结构,上下两个卫星本体通过卫星承力杆之间的配合实现连接。
进一步的,所述卫星本体为四棱柱构型或六棱柱构型。
进一步的,在每个卫星本体的上端面均布四个销孔,在每个卫星本体的下端面均布四个抗剪锥销,在运载平台上设有四个销孔。
进一步的,所述锁紧组件包括锁紧支座、锁紧转轴、锁紧电机和压紧板,锁紧支座固连在立柱上,所述立柱固定在运载平台上,锁紧电机安装在锁紧支座上,所述锁紧转轴安装在锁紧支座内,锁紧电机的电机轴带动锁紧转轴转动,所述压紧板的一端固定在锁紧转轴上,锁紧电机通过锁紧转轴驱动压紧板压紧最顶部的卫星承力杆。
进一步的,所述分离组件包括滑轨、若干滑块、若干钢丝绳、定滑轮A、滑轮支座A、定滑轮B、分离电机和滑轮支座B;所述滑轨底端固定在运载平台上,若干滑块与滑轨配合,滑块与卫星本体上的球形结构一一对应布置,所述定滑轮A通过滑轮支座A安装在基座上,所述定滑轮B通过滑轮支座B固定在运载平台上,所述定滑轮A布置在滑轨的上方,定滑轮B布置在滑轨的侧方下部,绕过定滑轮B和定滑轮A设有若干钢丝绳,且每个滑块连接一钢丝绳,所述定滑轮B由分离电机驱动。
进一步的,滑轨截面为等腰梯形,为滑块提供运动轨道;滑块一端为四棱柱结构,且内部开设有梯形开孔,所述滑块在滑轨上上下滑动,滑块的另一端为半球窝结构,所述半球窝结构与卫星组的球形结构配合;
所有钢丝绳的一端分别与相应的滑块的四棱柱结构端固连,另一端与定滑轮B固连,中间部分搭在定滑轮A上;钢丝绳为冗余钢丝绳。
进一步的,所述定滑轮A通过滑轮轴A安装在滑轮支座A上;在定滑轮A的两侧的滑轮轴A上对称布置两个套筒A,两个套筒A为定滑轮A提供轴向定位;滑轮支座A固连在基座上。
进一步的,所述定滑轮B通过滑轮轴B安装在滑轮支座B上;在定滑轮B的两侧的滑轮轴B上对称布置两个套筒B,两个套筒B为定滑轮B提供轴向定位;滑轮支座B固连在运载平台上。
一种可实现多星顺序释放的锁紧分离机构的工作方法,包括以下步骤:
1)锁紧状态
当卫星随火箭发射前及发射过程中,系统处于锁紧状态,卫星边角处的卫星承力杆,通过下面一颗卫星本体的卫星承立杆上端的变直径的圆柱状结构与上面一颗卫星本体的卫星承力杆下端的变直径的圆筒状结构配合,承受主要的轴向载荷与横向剪力,实现5个自由度的限制;通过卫星本体底面的抗剪锥销承受剩余的横向剪力,最后通过压紧板的压紧实现最后一个自由度的定位与整体的压紧;
2)分离过程
当卫星随火箭到达预定轨道时,锁紧分离机构收到分离信号,锁紧电机旋转,带动锁紧转轴转动,从而带动压紧板向外转动,解除对卫星本体的压紧及纵向移动自由度的限制;
接着,分离电机旋转,带动滑轮轴B转动,从而带动定滑轮B转动,进而带动钢丝绳绕定滑轮A移动,从而带动与钢丝绳固连的滑块沿着滑轨向上滑动,通过半球窝结构与球形结构的配合,带动卫星本体向上运动,实现分离;
并且,在第一颗卫星本体分离后,在分离电机的继续转动过程中,在滑块与冗余钢丝绳作用下实现卫星本体的逐个分离。
相对于现有技术,本发明所述的一种可实现多星顺序释放的锁紧分离机构及其工作方法具有以下优势:
1)四角的卫星承力杆与地面的四个抗剪锥销均为中心对称,故可以将上面卫星与下面卫星呈90°对称布置,使得相邻卫星的太阳翼交错布置,这种布置方式避免了卫星太阳翼面之间相互干涉,节省了运载空间。
2)各组件布局紧凑,机构体积小,安装空间小,可适用于不同形状及数量的卫星。
3)利用钢丝绳带动滑块在滑轨上滑动,进而通过半球窝-球形凸台机构,带动卫星分离,可实现卫星的逐个分离,通过对分离电机的控制可以控制每个卫星分离的时间。
4)卫星承力杆设计成上端为变直径圆柱状结构,下端为中空的圆筒状结构,一个承力杆的上端与另一个承力杆的下端可形成配合,通过承力杆之间的配合完成卫星之间的配置装配。
5)卫星的承力杆结构解决了卫星与卫星之间装配时的定位和配合问题,同时通过承力杆抵抗了卫星所受的大部分横向剪力,对卫星起到了保护作用。
6)采用抗剪锥销与卫星承力杆双重抗剪结构,有效减少发射过程中横向剪力损伤卫星的可能性。
附图说明
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
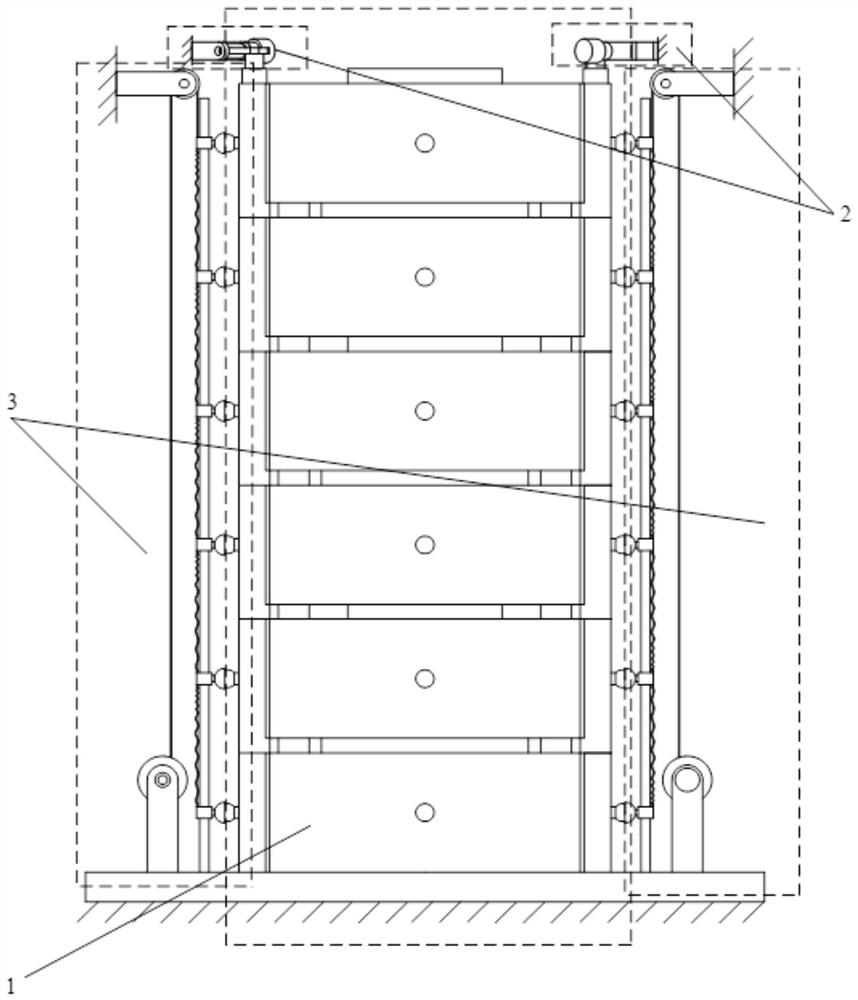
图1为本发明实施例所述的一种可实现多星顺序释放的锁紧分离机构的正视图;
图2为本发明实施例所述的一种可实现多星顺序释放的锁紧分离机构的俯视图;
图3为本发明实施例所述的一种可实现多卫星锁紧分离机构中的卫星组的示意图;
图4为本发明实施例所述的一种可实现多卫星锁紧分离机构中的锁紧组件的示意图;
图5为本发明实施例所述的一种可实现多卫星锁紧分离机构中的分离组件的示意图;
图6为本发明实施例所述的一种可实现多卫星锁紧分离机构的分离组件中定滑轮A及其相关零部件的示意图;
图7为本发明实施例所述的一种可实现多卫星锁紧分离机构的分离组件中定滑轮B及其相关零部件的示意图。
附图标记说明:
1-卫星组,1-1-运载平台,1-2-卫星本体,1-3-卫星承力杆,1-4-抗剪锥销,1-5-球形结构,2-锁紧组件,2-1-锁紧支座,2-2-锁紧转轴,2-3-锁紧电机,2-4-压紧板,3-分离组件,3-1-滑轨,3-2-滑块,3-3-钢丝绳,3-4-定滑轮A,3-5-滑轮轴A,3-6-套筒A,3-7-滑轮支座A,3-8-定滑轮B,3-9-分离电机,3-10-滑轮轴B,3-11-套筒B,3-12-滑轮支座B。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面将参考附图并结合实施例来详细说明本发明。
如图1-图7所示,一种可实现多星顺序释放的锁紧分离机构,包括卫星组1、锁紧组件2和分离组件3,所述卫星组1包括若干卫星本体1-2,所述的锁紧组件2位于卫星组1的上方,所述锁紧组件2与基座相连,所述锁紧组件2设有两组,且对称地布置在卫星组1的对角线处,所述的分离组件3设置两组,对称的布置在卫星组1的相对两侧,且分离组件3的底部与基座固定相连,分离组件3的内侧通过滑块与半球窝结构和卫星组上的球形结构相连;所述锁紧组件2压紧卫星组1,所述分离组件3逐个分离卫星本体1-2。
卫星组1还包括运载平台1-1、若干卫星承力杆1-3和若干抗剪锥销1-4,所述运载平台固定在基座上,在每个卫星本体的上端面均布若干销孔,在每个卫星本体的下端面均布若干抗剪锥销1-4,上一个卫星本体下端面的抗剪锥销与下一个卫星的上端面的销孔一一配合;在每个卫星本体1-2的每个边角处均布置有与卫星承力杆1-3固连的孔位,在每个卫星本体1-2的四周固连有与分离组件3连接的球形结构1-5;
在运载平台1-1上设有若干销孔,最下层的卫星本体通过抗剪锥销1-4定位在运载平台1-1上;卫星承力杆1-3的上端为变直径的圆柱状结构,下端为变直径的圆柱筒状结构,上下两个卫星本体通过卫星承力杆之间的配合实现连接。
卫星本体1-2为四棱柱构型或六棱柱构型。
在每个卫星本体1-2的上端面均布四个销孔,在每个卫星本体1-2的下端面均布四个抗剪锥销1-4,在运载平台1-1上设有四个销孔。
锁紧组件2包括锁紧支座2-1、锁紧转轴2-2、锁紧电机2-3和压紧板2-4,锁紧支座2-1固连在立柱上,所述立柱固定在运载平台1-1上,锁紧电机2-3安装在锁紧支座2-1上,所述锁紧转轴2-2安装在锁紧支座2-1内,锁紧电机2-3的电机轴带动锁紧转轴2-2转动,所述压紧板2-4的一端固定在锁紧转轴2-2上,锁紧电机2-3通过锁紧转轴2-2驱动压紧板2-4压紧最顶部的卫星承力杆1-3,锁紧转轴2-2为锁紧电机2-3驱动压紧板2-4提供传力路径。压紧板2-4为压紧最顶部卫星承力杆1-3的终端机构。
分离组件3包括滑轨3-1、若干滑块3-2、若干钢丝绳3-3、定滑轮A 3-4、滑轮支座A3-7、定滑轮B 3-8、分离电机3-9和滑轮支座B 3-12;所述滑轨3-1底端固定在运载平台1-1上,若干滑块3-2与滑轨3-1配合,滑块3-2与卫星本体上的球形结构1-5一一对应布置,所述定滑轮A 3-4通过滑轮支座A 3-7安装在基座上,所述定滑轮B 3-8通过滑轮支座B 3-12固定在运载平台1-1上,所述定滑轮A 3-4布置在滑轨3-1的上方,定滑轮B3-8布置在滑轨3-1的侧方下部,若干钢丝绳3-3顺次绕过定滑轮B3-8和定滑轮A3-4设置,且每个滑块3-2连接一根钢丝绳3-3,所述定滑轮B 3-8由分离电机3-9驱动。
滑轨3-1截面为等腰梯形,为滑块3-2提供运动轨道;滑块3-2一端为四棱柱结构,且内部开设有梯形开孔,所述滑块在滑轨3-1上上下滑动,滑块3-2的另一端为半球窝结构,所述半球窝结构与卫星组1的球形结构1-5配合;
所有钢丝绳3-3的一端分别与相应的滑块3-2的四棱柱结构端固连,另一端与定滑轮B 3-8固连,中间部分搭在定滑轮A 3-4上;钢丝绳3-3为冗余钢丝绳。
定滑轮A 3-4通过滑轮轴A3-5安装在滑轮支座A 3-7上,为钢丝绳提供支撑;在定滑轮A 3-4的两侧的滑轮轴A 3-5上对称布置两个套筒A 3-6,两个套筒A 3-6为定滑轮A 3-4提供轴向定位;滑轮支座A 3-7固连在基座上,为定滑轮A 3-4提供支撑。
定滑轮B 3-8通过滑轮轴B 3-10安装在滑轮支座B 3-12上,并且通过滑轮轴B 3-10与分离电机3-9实现连接;在定滑轮B 3-8的两侧的滑轮轴B 3-10上对称布置两个套筒B3-11,两个套筒B 3-11为定滑轮B 3-8提供轴向定位;滑轮支座B 3-12固连在运载平台1-1上,为定滑轮B 3-8提供支撑。
一种可实现多星顺序释放的锁紧分离机构的工作方法,包括以下步骤:
1、锁紧状态
当卫星随火箭发射前及发射过程中,系统处于锁紧状态,卫星边角处的卫星承力杆1-3,通过下面一颗卫星本体1-2的卫星承立杆1-3上端的变直径的圆柱状结构与上面一颗卫星本体1-2的卫星承力杆1-3下端的变直径的圆筒状结构配合,承受主要的轴向载荷与横向剪力,实现5个自由度的限制;通过卫星本体1-2底面四个抗剪锥销1-4承受剩余的横向剪力,最后通过压紧板2-4的压紧实现最后一个自由度的定位与整体的压紧;
2、分离过程
当卫星随火箭到达预定轨道时,锁紧分离机构收到分离信号,锁紧电机2-3旋转,带动锁紧转轴2-2转动,从而带动压紧板2-4向外转动,解除对卫星本体1-2的压紧及纵向移动自由度的限制;
接着,分离电机3-9旋转,带动滑轮轴B3-10转动,从而带动定滑轮B 3-8转动,进而带动钢丝绳3-3绕定滑轮A 3-4移动,从而带动与钢丝绳3-3固连的滑块3-2沿着滑轨3-1向上滑动,通过半球窝结构与球形结构的配合,带动卫星本体1-2向上运动,实现分离;
并且,在第一颗卫星本体分离后,在分离电机3-9的继续转动过程中,在滑块3-2与冗余钢丝绳3-3共同作用下实现卫星本体1-2的逐个分离。
一种多卫星锁紧分离机构,发射之前安装在火箭的舱段内,在起飞之前以及发射过程中,机构将卫星组锁紧,到达空间预定轨道后通过指令驱动解锁,将卫星组释放,然后卫星在定滑轮带动滑块与半球窝运动的作用下,逐个分离,达到对卫星释放的效果。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种可实现多星顺序释放的锁紧分离机构及其工作方法
- 一种可实现组合体飞行器之间的锁紧分离机构及工作方法